【万字详解】Linux进程信号||一文搞定进程信号||附测试代码
进程信号
- 信号理解
-
- 什么是信号?
- 进程信号
- 查看系统信号
- 在技术角度理解信号
- 注意
- 信号处理
-
- 信号异步机制
- 信号产生
-
- 通过终端按键产生信号
- signal函数注意事项
- 通过系统接口完成发送信号
-
- 手写一个kill命令
- 由软件产生信号
- 硬件异常产生信号
- 信号阻塞
-
- 信号相关概念
- 内核中的信号
- sigset_t函数
- 信号集操作函数介绍
- sigprocmask
- sigpending函数
信号理解
什么是信号?
- 在生活中,有很多的例子,例如:红绿灯、旗语、铃声等等,这些东西都是给人传递一种特定信号的,如在交通中,红灯停,绿灯行。
- Q:我们怎么知道红灯停绿灯行?
A:通过学习,了解的!即使我们现在不在道路上,我们也知道这个常识,知道当这个信号出现时我们应该怎么处理,即使当前信号还没出现!
进程信号
信号是给进程发送的,那么进程也有对应的信号处理的机制(这个好比我们知道交规一样,进程信号处理机制是程序员预先设定好的!),一样的道理,即便是信号还没有产生,但是进程已然存在对应信号的处理机制!
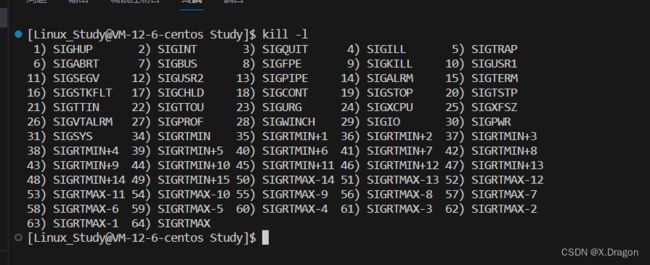
查看系统信号
- kill-l 命令
在技术角度理解信号
- 用户输入命令,在Shell下启动一个前台进程。
. 用户按下 Ctrl-C ,这个键盘输入产生一个硬件中断,被OS获取,解释成信号,发送给目标前台进程
. 前台进程因为收到信号,进而引起进程退出
[hb@localhost code_test]$ cat sig.c
#include 假设你是一个进程,而快递员代表操作系统。你的任务是一直等待快递员送信号(快递)给你。在这里,快递员相当于操作系统,会向你发送各种信号,如Ctrl-C信号。
代码中的while(1)表示你一直在等待,就像一直在家里等待快递。每秒你都打印出一条消息:“I am a process, I am waiting signal!”,表示你不断地检查是否有快递到达。
当你收到了Ctrl-C信号时(就像快递员按响了你家门铃),你会看到在终端上出现"^C",并且你的程序会终止执行。
这就是代码信号处理过程的模拟。你作为一个进程一直在等待信号,而操作系统会发送不同的信号给你,如Ctrl-C信号,你需要对这些信号做出相应的处理,比如终止程序的执行。
总结来说,代码中的进程等待信号的过程就像你一直在家等待快递的到来。当操作系统发送信号给你,你需要对信号做出相应的处理,就像按下了门铃后你会去开门签收快递。不同的信号可以触发不同的处理动作,让你的程序做出相应的反应。
注意
- Ctrl-C 产生的信号只能发给前台进程。一个命令后面加个&可以放到后台运行,这样Shell不必等待进程结束就可以接受新的命令,启动新的进程。
- Shell可以同时运行一个前台进程和任意多个后台进程,只有前台进程才能接到像 Ctrl-C 这种控制键产生的信号。
- 前台进程在运行过程中用户随时可能按下 Ctrl-C 而产生一个信号,也就是说该进程的用户空间代码执行到任何地方都有可能收到 SIGINT 信号而终止,所以信号相对于进程的控制流程来说是异步(Asynchronous)的
信号处理
信号异步机制
- 什么是异步?
异步是指事件之间不需要严格的同步和等待,而是可以独立地进行处理。在异步操作中,一个事件的触发并不会导致程序的立即停顿或阻塞,而是允许程序继续执行其他任务,而后在合适的时间点再去处理该事件或结果。
异步操作通常用于处理耗时较长的任务,如网络请求、文件读写、数据库查询等。在传统的同步操作中,当执行这些耗时任务时,程序会一直等待任务完成才能继续执行后续代码。而在异步操作中,程序可以先发起这些耗时任务,然后继续执行其他代码,等待任务完成后再进行后续处理。
异步操作可以提高程序的响应性能和效率,尤其在涉及到多任务并行处理的场景下,异步操作能够更好地利用系统资源和提高系统的并发能力。
在编程中,异步操作通常通过回调函数、事件驱动机制、多线程或异步IO等方式来实现。一些编程语言和框架提供了异步编程的支持,使得开发者能够更方便地处理异步操作。
== 因为信号的产生是异步的,当一个信号产生的时候,对应的进程可能正在处理其他的更加重要的事情,那么进程可以暂时不去处理这个信号 ==
当一个信号产生时 进程可能执行的操作:
- 处理信号
- 默认动作
- 忽略
- 自定义函数处理
- 暂时不处理 (标记)
在操作系统中,当进程收到信号后,如果不设置忽略,操作系统会在进程的 PCB(进程控制块)中记录该信号的待处理状态。这通常通过在 PCB 中的位图(或类似的数据结构)来实现。
在 Linux 中,进程的 PCB 数据结构中有一个名为 sigpending 的位图,用于表示当前已经到达但还未处理的待处理信号。当进程收到信号但还未处理时,相应信号的位会被设置为 1。一旦进程开始处理该信号,操作系统会将对应位重新设置为 0,表示信号已经处理完成。
具体来说,sigpending 位图在 PCB 数据结构中用于存储当前进程收到但还未处理的信号。当进程收到信号时,相应信号的位会被设置为 1,表示信号已经到达。当进程准备处理信号时,会检查 sigpending 位图,找到所有待处理的信号,并依次处理它们。处理完成后,相应信号的位会被重新设置为 0,表示信号已经处理完毕。
这样,即使进程在收到信号后没有立即处理,操作系统也能够记录信号的状态,并在适当的时候通知进程处理相应的信号。这种方式实现了异步信号处理,允许进程在合适的时候处理优先级较高的信号,而不会被阻塞在处理低优先级的信号上。
信号产生
通过终端按键产生信号
-
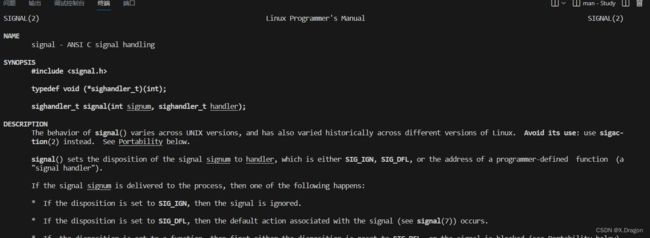
man 2 signal 查看函数
-
signal函数是用于在Unix/Linux系统中设置信号处理函数的函数。它允许我们指定在收到指定信号时应该执行的处理函数,从而实现对信号的处理。
-
函数原型
#include - 参数说明:
- signum:指定要设置处理函数的信号的编号。可以使用预定义的宏(如SIGINT、SIGTERM等),也可以使用对应的信号编号。例如,SIGINT表示用户键入Ctrl+C产生的中断信号。
- handler:指定要注册的信号处理函数。它是一个函数指针,指向一个形如void func(int)的函数,该函数接收一个整数参数(表示信号编号)并无返回值。
- 函数的返回值是一个函数指针,表示之前注册的处理函数。
-
使用signal函数时,一般会先定义一个自定义的信号处理函数,然后通过signal函数将其注册到指定的信号上。当进程收到相应的信号时,操作系统会调用该信号处理函数来处理该信号。函数回调机制在这里体现在信号发生时,系统通过函数指针调用我们提供的处理函数。
-
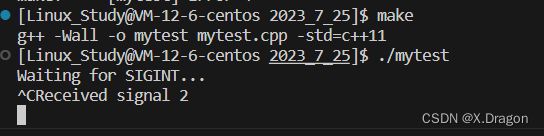
测试代码
#include 在上述示例中,当用户在终端中按下Ctrl+C(产生SIGINT信号)时,进程会调用sigHandler函数来处理该信号,并输出"Received signal 2"(因为SIGINT的编号是2)。
注意:使用signal函数时,需要注意信号的可重入性问题。在一些情况下,建议使用更加安全可靠的sigaction函数来替代signal函数。
- 结果
signal函数注意事项
signal函数可以自定义信号的处理机制,如上面所示,当在终端按下Ctrl+c(也就是2号进程)时会打印一个: Received signal 2 这就是我们的自定义行为
那么所有的信号都可以被自定义吗?
答案:不是 9号信号不可以被定义 (管理员信号 )
Linux中的9号信号是SIGKILL,也称为强制终止信号。SIGKILL用于立即终止一个进程,并且该信号无法被捕获或忽略。当进程收到SIGKILL信号时,它会立即终止,不会有任何处理和清理工作。
通常情况下,应该避免直接使用SIGKILL信号来终止进程,除非有特殊原因需要强制终止进程。因为进程没有机会进行资源清理和善后工作,可能会导致数据丢失或其他不稳定的情况。
相比之下,可以使用SIGTERM信号来通知进程进行正常退出,这样进程有机会在收到信号后进行资源释放和善后工作,保证系统的稳定性。
通过系统接口完成发送信号
- man 2 kill

在Linux和类Unix操作系统中,kill函数用于向指定进程发送信号。它可以用来发送预定义的信号,如终止进程、中断进程、挂起进程等。
函数原型如下
#include 参数说明:
- pid: 指定目标进程的进程ID。可以是正整数表示目标进程的进程ID,也可以是负整数:
- 正整数:发送信号给指定进程ID的进程。
- 0:发送信号给当前进程组中的所有进程。
- -1:发送信号给系统中的所有进程,除了init进程(进程ID为1)和调用进程的父进程。
- 负整数:发送信号给指定进程组ID的所有进程(进程组ID为-pid)。
- sig: 指定要发送的信号编号。可以是预定义的信号宏,也可以是自定义的信号编号。
手写一个kill命令
//手写一个kill命令
static void Usage(const std::string &proc)
{
cerr<<"Usege:\n\t"<<proc<<"signo pid"<<endl;
}
int main(int argc,char *argv[]) {
if(argc!=3)
{
Usage(argv[0]);
exit(1);
}
if(kill(static_cast<pid_t>(atoi(argv[2])),atoi(argv[1]))==-1) //类型转换 调用函数
{
//失败报错
cerr<<"kill"<<strerror(errno)<<endl;
exit(2);
}
return 0;
}
- 代码解释:
if (argc != 3): 这行代码判断命令行参数的数量是否为3,即程序名本身和两个额外参数。如果不是3个参数,说明用户输入有误,程序没有正确使用,因此调用Usage函数输出使用方法,并通过exit(1)终止程序运行。
kill(static_cast
(atoi(argv[2])), atoi(argv[1])): 这行代码使用kill函数向目标进程发送信号。argv[2]是第二个命令行参数,即目标进程的进程ID,通过atoi函数将字符串转换为整数,并使用static_cast 进行类型转换,以满足kill函数的参数要求。argv[1]是第一个命令行参数,即要发送的信号编号,也通过atoi函数将字符串转换为整数。最终调用kill函数发送信号,如果发送失败,kill函数会返回-1,此时程序会输出相应的错误信息,使用cerr输出错误消息,然后通过exit(2)终止程序运行。
总的来说,这段代码用于向指定进程发送信号,并根据发送结果输出相应的错误信息,是一个简单的进程通信示例
- 代码测试
test
using namespace std;
#include- 运行结果
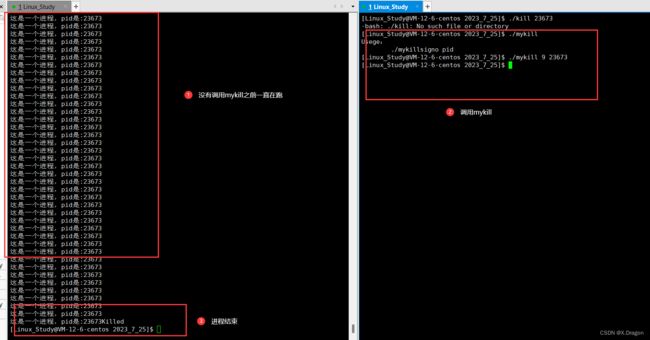
成功~
由软件产生信号
#include
unsigned int alarm(unsigned int seconds);
调用alarm函数可以设定一个闹钟,也就是告诉内核在seconds秒之后给当前进程发SIGALRM信号, 该信号的默认处理动
作是终止当前进程
这个函数的返回值是0或者是以前设定的闹钟时间还余下的秒数。打个比方,某人要小睡一觉,设定闹钟为30分钟之后响,20分钟后被人吵醒了,还想多睡一会儿,于是重新设定闹钟为15分钟之后响,“以前设定的闹钟时间还余下的时间”就是10分钟。如果seconds值为0,表示取消以前设定的闹钟,函数的返回值仍然是以前设定的闹钟时间还余下的秒数
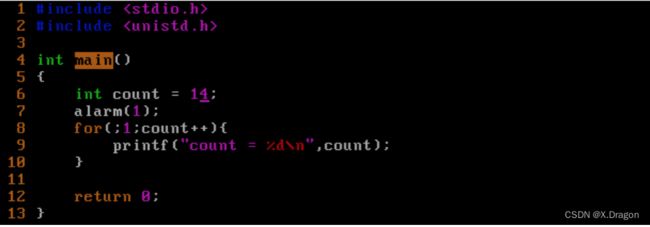
这个程序的作用是1秒钟之内不停地数数,1秒钟到了就被SIGALRM信号终止。
硬件异常产生信号
硬件异常被硬件以某种方式被硬件检测到并通知内核,然后内核向当前进程发送适当的信号。例如当前进程执行了除以0的指令,CPU的运算单元会产生异常,内核将这个异常解释 为SIGFPE信号发送给进程。再比如当前进程访问了非法内存地址,MMU会产生异常,内核将这个异常解释为SIGSEGV信号发送给进程。
- 异常捕捉
#include 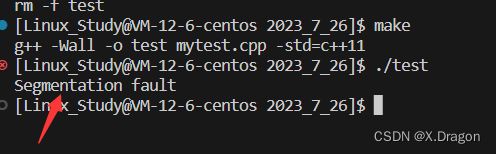
== Segmentation fault 对应系统第11号信号 SIGSEGV ==
信号阻塞
通过前文的介绍,我们知道,当进程接收到信号后处理有三种行为:
- 默认行为 (由系统默认行为处理)
- 忽略行为(忽略不处理)
- 自定义行为(用户自定义函数处理)
信号相关概念
- 实际执行信号的处理动作称为信号递达(Delivery)
- 信号从产生到递达之间的状态,称为信号未决(Pending)。
- 进程可以选择阻塞 (Block )某个信号。
- 被阻塞的信号产生时将保持在未决状态,直到进程解除对此信号的阻塞,才执行递达的动作.
- 注意,阻塞和忽略是不同的,只要信号被阻塞就不会递达,而忽略是在递达之后可选的一种处理动作。
内核中的信号
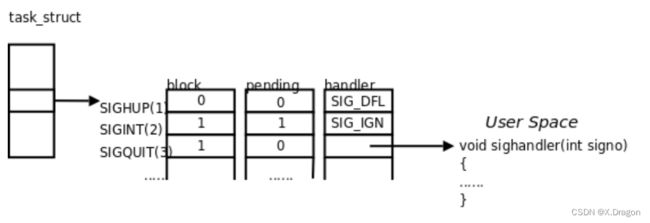
图中我们可以看到 信号在内核中的数据结构分为有三张页表:
- block:是否阻塞
- pending:存储阻塞的信号集
- handler:处理该对应信号的方法
- 每个信号都有两个标志位分别表示阻塞(block)和未决(pending),还有一个函数指针表示处理动作。信号产生时,内核在进程控制块中设置该信号的未决标志,直到信号递达才清除该标志。在上图的例子中,SIGHUP信号未阻塞也未产生过,当它递达时执行默认处理动作。
- SIGINT信号产生过,但正在被阻塞,所以暂时不能递达。虽然它的处理动作是忽略,但在没有解除阻塞之前不能忽略这个信号,因为进程仍有机会改变处理动作之后再解除阻塞。
- SIGQUIT信号未产生过,一旦产生SIGQUIT信号将被阻塞,它的处理动作是用户自定义函数sighandler。
- 如果在进程解除对某信号的阻塞之前这种信号产生过多次,将如何处理?POSIX.1允许系统递送该信号一次或多次。Linux是这样实现的:常规信号在递达之前产生多次只计一次,而实时信号在递达之前产生多次可以依次放在一个队列里。
sigset_t函数
从上图来看,每个信号只有一个bit的未决标志,非0即1,不记录该信号产生了多少次,阻塞标志也是这样表示的。因此,未决和阻塞标志可以用相同的数据类型sigset_t来存储,sigset_t称为信号集,这个类型可以表示每个信号的“有效”或“无效”状态,在阻塞信号集中“有效”和“无效”的含义是该信号是否被阻塞,而在未决信号集中“有效”和“无效”的含义是该信号是否处于未决状态
信号集操作函数介绍
#include == 相当于对相关数据结构进行增删查改 ==
- 函数sigemptyset初始化set所指向的信号集,使其中所有信号的对应bit清零,表示该信号集不包含 任何有效信号。
- 函数sigfillset初始化set所指向的信号集,使其中所有信号的对应bit置位,表示 该信号集的有效信号包括系统支持的所有信号。
- 注意,在使用sigset_ t类型的变量之前,一定要调 用sigemptyset或sigfillset做初始化,使信号集处于确定的状态。初始化sigset_t变量之后就可以在调用sigaddset和sigdelset在该信号集中添加或删除某种有效信号。
- 这四个函数都是成功返回0,出错返回-1。sigismember是一个布尔函数,用于判断一个信号集的有效信号中是否包含某种 信号,若包含则返回1,不包含则返回0,出错返回-1。
sigprocmask
- 函数原型
int sigprocmask(int how, const sigset_t *set, sigset_t *oldset);
- how:表示抑制或解除抑制信号的方式,可以取以下三个值:
- SIG_BLOCK:将set指向的信号集中的信号添加到进程的信号发光字中,即阻止这些信号。
- SIG_UNBLOCK:将set指向的信号集中的信号从进程的信号发光字中关闭,即解除对这些信号的阻塞。
- SIG_SETMASK:将set指向的信号集中的信号设置为进程的信号发光字,即用set中的信号集完全替换原来的信号发光字。
- set:一个指向sigset_t类型的指针,用于指定需要阻塞或解除阻塞的信号集。
- oldset:一个指向sigset_t类型的指针,用于保存之前的信号提示字。如果之前不为NULL,oldset指向的信号集将被填充为调用sigprocmask之前的信号提示字
- 实例代码
#include 在示例中,首先使用sigprocmask函数将SIGINT和SIGQUIT信号添加到进程的信号提示字中,然后解除对SIGINT信号的阻塞,保持SIGQUIT信号仍然被上述阻塞。这样,在不同阶段执行代码时,就会根据信号信号字的设置决定是否接收相应的信号。
sigpending函数
sigpending是一个系统调用,用于获取当前被阻塞的未决信号集,即当前进程接收但尚未处理的被阻塞信号集合。
函数原型为:
int sigpending(sigset_t *set);
set:一个指向sigset_t类型的指针,用于存储
调用sigpending函数后,被阻塞的未决信号集将会被填充到set指向的sigset_t类型的信号中。如果进程没有设置信号提示字或者没有未决信号,则set中的信号集将会被清空。
使用示例:
#include 在示例中,首先设置信号提示字,阻止SIGINT信号。然后获取被阻塞的未决信号集,并检查其中是否有SIGINT信号。如果有,则表示进程收到了上述但开始处理的SIGINT信号,否则表示该信号不在信号集中