图算法——求最短路径(Dijkstra算法)
目录
一、什么是最短路径
二、迪杰斯特拉(Dijkstra)算法
三、应用Dijkstra算法
(1) Dijkstra算法函数分析
求图的最短路径在实际生活中有许多应用,比如说在你在一个景区的某个景点,参观完后,要怎么走最少的路程到你想参观的下个景点,这就利用到了求图最短路径的算法。求图的最短路径有很多算法,这里介绍一种迪杰斯特拉(Dijkstra)算法来求图的最短路径。
在介绍算法前,需要掌握一点图的基本知识,比如说什么是路径,什么是路径长度等。如果对这些不了解的话,建议先了解一下。
这是我写的一篇博客,对图的一些基本知识的简介——图的一些基本知识。
一、什么是最短路径
在网图和非网图中,最短路径的含义是不同的。由于非网图没有边上的权值,所谓最短路径,其实指的就是两个顶点之间经过的边数最少的路劲(即可以理解为把每一条边的权值看作是1)。
对于网图来说,最短路径,是指两顶点之间经过的边上的权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。
求带权有向图G的最短路径问题一般可分为两类:一是单源最短路径,即求图中某一个顶点到其它顶点的最短路径,可以通过经典的 Dijkstra(迪杰斯特拉)算法求解(即是我要介绍的算法);二是求每对顶点间的最短路径,可通过Floyd(弗洛伊德)算法来求解。
二、迪杰斯特拉(Dijkstra)算法
Dijkstra算法算法思路是设置一个集合S记录已求得的最短路径的顶点,初始时把源点V0(图中的某个顶点)放入S,集合S每并入一个新顶点 V,都要修改源点V0到集合 V-S 中顶点当前的最短路径长度值(这里可能大家会很懵,但等会我会用一个例子来解说)。
在构造过程中需要两个辅助数组:
- dist[ ] :记录从源点V0到其他各顶点当前的最短路径长度,它的初态为:若从 V0 到 V 有直接路径(即V0 和 V 邻接),则dist[ i ]为这两个顶点边上的权值;否则置 dist[ i ] 为 ∞。
- path[ ]:path[ i ]表示从源点到顶点 i 之间的最短路径的前驱结点。在算法结束时,可以根据其值追溯到源点 V0 到 V 的最短路径。
假设从顶点 V0 = 0出发,邻接矩阵Edge表示带权无向图,Edge[i][j]表示无向边 (i, j)的权值,若不存在无向边(i, j),则Edge[i][]为 ∞。
Dijkstra算法步骤如下:
1)初始化:集合S初始化为{0},dist[ ] 的初始值dist[i] = Edge[0][i],path[ ]的初始值path[i] = -1,i = 1,2,...,n-1。
2)从顶点集合 V - S中选出V,满足dist[j] = Min{dist[i] | V V - S},V就是当前求的一条从 V0 出发的最短路径的终点,令S = S{j}。
3)修改从V0出发到集合 V - S上任一顶点 V 可达的最短路径长度:若
dist[j] + Edge[j][k] < dist[k],则更新 dist[k] = dist[j] + Edge[j][k],并修改path[j] = k(即修改顶点V的最短路径的前驱结点 ) 。
4)重复 2)~ 3)操作共 n-1 次,直到所有的顶点都包含在 S 中。
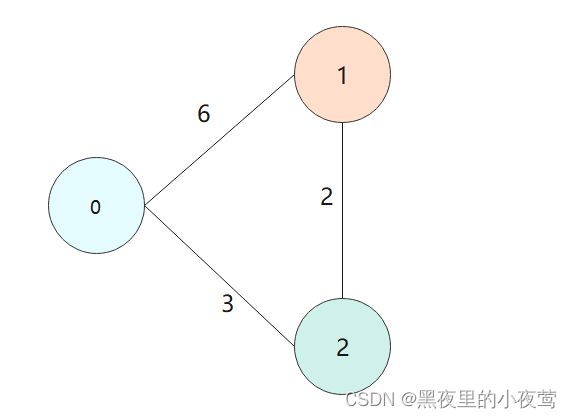
解释下步骤3),每当一个顶点加入S后,可能需要修改源点V0 到集合 V-S中的可达顶点当前的最短路径长度。下面举一个例子。如下图所示,源点为V0,初始时S = {V0},dist[1] = 6, dist[2] = 3,当V并入集合S后,dist[1] 需要更新为 5(其比6小,即说明两点之间不是直线最短,要根据两点之间路径的权值之和来看)。
下面来讲解利用Dijkstra算法来求下图中的顶点 0 出发至其余顶点的最短路径的过程。
 初始化:集合S初始化为{V},V可达V和V,其余顶点不可达,因此dist[]数组和path[]数组的设置如下:
初始化:集合S初始化为{V},V可达V和V,其余顶点不可达,因此dist[]数组和path[]数组的设置如下:
第一轮:选出最小dist[2],将顶点 V 并入集合S,此时已找到 V 到 V 的最短路径,S = {V,V}。当 V 加入到S后,从V到集合V-S中可到达顶点的最短路径长度可能会产生变化。因此需要更新dist[]数组。V可达V,因V -> V -> V的距离 5 比 dist[1] = 6小,更新dist[1] = 5,并修改 path[1] = 2(即V的最短路径的前驱为V);V 可达 V,V -> V - > V的距离 8 比 dist[3] = ∞ 小,更新dist[3] = 8,path[3] = 2;V可达V,V -> V -> V 的距离 10 小于 dist[5] = ∞,更新dist[5] = 10,path[5] = 2。V再无到达其余的顶点的路径,结束这一轮,此时dist[]数组和path[]数组如下:
 第二轮:选出最小值dist[1],将顶点 V 并入集合S,此时已找到 V 到 V 的最短路径,S = {V,V,V}。然后更新dist[]数组和path[]数组,V可达V,V -> V -> V -> V 的距离 6 小于 dist [3] = 8 ,更新 dist[3] = 6,path[3] = 1;V 可达 V,但V已经在集合S中,故不进行操作;V 可达 V, V -> V -> V -> V的距离 9 小于 dist[4] = ∞,更新dist[4] = 9,path[4] = 1。V 已无到达其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第二轮:选出最小值dist[1],将顶点 V 并入集合S,此时已找到 V 到 V 的最短路径,S = {V,V,V}。然后更新dist[]数组和path[]数组,V可达V,V -> V -> V -> V 的距离 6 小于 dist [3] = 8 ,更新 dist[3] = 6,path[3] = 1;V 可达 V,但V已经在集合S中,故不进行操作;V 可达 V, V -> V -> V -> V的距离 9 小于 dist[4] = ∞,更新dist[4] = 9,path[4] = 1。V 已无到达其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:

第三轮: 选出最小值 dist[3],将顶点 V 并入集合 S,此时已找到 V 到 V 的最短路径,S = { V,V,V,V}。接着更新dist[]数组和path[]数组,V 可到达 V, V -> V -> V -> V -> V 的距离为 9 等于 dist[4] = 9,我们不做更新;V 可到达 V, V -> V -> V -> V -> V 的距离为 12 大于 dist[5] = 10,不做更新。 V 再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第四轮:选出最小值 dist[4],将顶点 V 并入集合 S,此时已找到 V 到 V的最短路径,S = { V,V,V,V,V}。继续更新dist[]数组和path[]数组,V可到 V, V -> V -> V -> V -> V的距离 11 小于 dist[5] = 10,故不进行更新操作;V 可到 V, V -> V -> V -> V -> V的距离 11 小于 dist[6] = ∞,更新 dist[6] = 11,path[6] = 4。V 再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
 第五轮: 选出最小值 dist[5],将顶点 V 并入集合S,此时已找到 V 到 V的最短路径,S = { V,V,V,V,V,V}。然后ist[]数组和path[]数组,V 可到 V, V -> V -> V -> V 的最短路径 13 大于 dist[6],故不进行更新操作。V 再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:
第五轮: 选出最小值 dist[5],将顶点 V 并入集合S,此时已找到 V 到 V的最短路径,S = { V,V,V,V,V,V}。然后ist[]数组和path[]数组,V 可到 V, V -> V -> V -> V 的最短路径 13 大于 dist[6],故不进行更新操作。V 再无达到其余顶点的路径,结束此轮,此时dist[]数组和path[]数组如下:

第六轮:选出最小值 dist[6],将顶点 V 并入集合,此时全部顶点都已包含在S中,结束算法。
整个算法每一轮的结果如下: 
总结:Dijkstra算法就是最开始选离源点V最近的点,然后选好点后,再从选好点的看其邻接点的距离dist[]是否减小,减小就修改dist[]和path[];否则就不进行修改操作。Dijkstra算法基于贪心策略,用邻接矩阵表示图时,来使用Dijkstra算法,其时间复杂度为O(n*n)。当边上带有负权值时,Dijkstra算法并不适用。
使用dist[]数组和path[]数组,求最短路径,这里介绍一个例子,其它顶点依次类推。
V到V的最短路径,先利用dist[6] = 11 得出 V到V的距离,然后利用path[]得出路径。path[6] = 4,顶点V的前驱顶点是 V,再由 path[4] = 1,表示 V 的前驱是 V , path[1] = 2,表示 V 的前驱是 V,path[2] = -1,结束。最后可以得到 V 到 V 的最短路径为 V <- V <- V <- V <- V,即 V -> V -> V -> V -> V 。
三、应用Dijkstra算法
理解上面的Dijkstra算法求最短路径的过程,那么下面的应用Dijkstra算法的程序就很容易理解。此程序分三大块,在程序末尾我会来粗略介绍下。
使用此程序需输入以下内容创建图G:
第一步:7 12
第二步:0123456
第三步:依次输入下面的内容,输入完一行就按下换行键
0 1 6
0 2 3
1 2 2
1 3 1
1 4 4
2 3 5
2 5 7
3 4 3
3 5 6
4 5 2
4 6 2
5 6 3
上面输入完后,即可创建下面的图G: 
/*
使用此程序需输入以下内容创建图G:
第一步:7 12
第二步:0123456
第三步:依次输入下面的内容,输入完一行就按下换行键
0 1 6
0 2 3
1 2 2
1 3 1
1 4 4
2 3 5
2 5 7
3 4 3
3 5 6
4 5 2
4 6 2
5 6 3
*/
#include
#include
#include
#define MaxVerterNum 100 // 顶点数目的最大值
#define INFINITY 65535 // 用65535代表 ∞
typedef char VertexType; // 顶点的数据类型
typedef int EdgeType; // 带权图中边上权值的数据类型
/* 邻接矩阵的存储结构 */
typedef struct
{
VertexType Vexs[MaxVerterNum]; // 顶点表
EdgeType Edge[MaxVerterNum][MaxVerterNum]; // 邻接矩阵
int vexNum, arcNum; // 图当前顶点数和弧数
}MGraph;
/*清除缓冲区的换行符*/
void Clean(void)
{
while (getchar() != '\n')
continue;
}
/* 建立无向网图的邻接矩阵表示 */
void CreateMGraph(MGraph* G);
/* 迪杰斯特拉(Dijkstra) 算法*/
typedef int Patharc[MaxVerterNum]; // 用于存储最短路径下标的数组,从源点Vi到顶点Vj之间的最短路径的前驱
typedef int ShortPathTable[MaxVerterNum]; // 用于存储到各点最短路径的权值和
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable D);
/* 输出最短路径 */
/* Dijkstra算法的结果输出 */
void Show_ShortestPath_Dijkstra(Patharc path, ShortPathTable dist, MGraph G, int v0);
int main(void)
{
MGraph G;
Patharc path;
ShortPathTable dist;
CreateMGraph(&G);
for (int i = 0; i < G.vexNum; i++) // 输出各点到各点的最短路径序列,不再局限于一个顶点
{
ShortestPath_Dijkstra(G, i, path, dist);
Show_ShortestPath_Dijkstra(path, dist, G, i);
}
return 0;
}
/* 建立无向网图的邻接矩阵表示 */
void CreateMGraph(MGraph* G)
{
int i, j, k, w;
printf("请输入顶点数和边数:");
scanf("%d %d", &G->vexNum, &G->arcNum); // 获取无向图顶点数和边数
printf("请输入全部顶点信息:\n");
Clean(); // 将换行符去除
for (i = 0; i < G->vexNum; i++) // 读取顶点信息,建立顶点表
scanf("%c", &G->Vexs[i]);
for (i = 0; i < G->vexNum; i++)
for (j = 0; j < G->vexNum; j++)
G->Edge[i][j] = INFINITY; // 邻接矩阵初始化
for (k = 0; k < G->arcNum; k++) // 读入arcNum条边,建立邻接矩阵
{
printf("请输入边(Vi, Vj)上的下标i,下标j和权w:\n");
scanf("%d %d %d", &i, &j, &w); // 获取边和权
G->Edge[i][j] = w; // 无向图矩阵对称
G->Edge[j][i] = G->Edge[i][j];
}
return;
}
/* 迪杰斯特拉(Dijkstra) 算法*/
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable dist)
{
int v, w, k, min;
int final[MaxVerterNum]; /* final[w] = 1表示求得顶点 v0 至 vw的最短路 径,即已访问过顶点vw*/
for (v = 0; v < G.vexNum; v++)
{
final[v] = 0; // 全部顶点初始化为未知最短路径状态
dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值
path[v] = -1; // 初始化路劲数组p为-1
}
dist[v0] = 0; // v0至v0路径为0
final[v0] = 1; // v0至v0不需要路径
/* 开始主循环,每次求得v0到某个顶点v的最短路径*/
for (v = 1; v < G.vexNum; v++)
{
min = INFINITY; // 当前所知离v0顶点的最近距离
for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点
{
if (!final[w] && dist[w] < min)
{
k = w;
min = dist[w]; // w顶点离v0顶点更近
}
}
final[k] = 1; // 将目前找到的最近的顶点置为1
for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离
{
/* 如果经过v顶点的路径比现在这条路径的长度短的话 */
if (!final[w] && (min + G.Edge[k][w] < dist[w]))
{
/* 找到了更短的路径,修改D[w]和P[w] */
dist[w] = min + G.Edge[k][w]; // 修改当前路径长度
path[w] = k;
}
}
}
}
/* 输出最短路径 */
/* Dijkstra算法的结果输出 */
void Show_ShortestPath_Dijkstra(Patharc path, ShortPathTable dist, MGraph G, int v)
{
int w, k;
printf("V%d到各点的最短路径如下:\n", v);
for (w = 0; w < G.vexNum; w++)
{
if (w != v)
{
printf("V%d-V%d weight: %d", v, w, dist[w]);
k = path[w];
printf(" path: V%d", w);
while (k != -1) // 当 k = -1 ,结束循环并输出源点
{
printf(" <- V%d", k);
k = path[k];
}
printf(" <- V%d\n", v);
}
}
printf("\n");
} (1) Dijkstra算法函数分析
/* 迪杰斯特拉(Dijkstra) 算法*/
void ShortestPath_Dijkstra(MGraph G, int v0, Patharc path, ShortPathTable dist)
{
int v, w, k, min;
int final[MaxVerterNum]; // final[w] = 1表示求得顶点 v0 至 vw的最短路径,即已访问过顶点vw
for (v = 0; v < G.vexNum; v++)
{
final[v] = 0; // 全部顶点初始化为未知最短路径状态
dist[v] = G.Edge[v0][v]; // 将与v0点有连线的顶点加上权值
path[v] = -1; // 初始化路劲数组p为-1
}
dist[v0] = 0; // v0至v0路径为0
final[v0] = 1; // v0至v0不需要路径
/* 开始主循环,每次求得v0到某个顶点v的最短路径*/
for (v = 1; v < G.vexNum; v++)
{
min = INFINITY; // 当前所知离v0顶点的最近距离
for (w = 0; w < G.vexNum; w++) // 寻找离v0最近的顶点
{
if (!final[w] && dist[w] < min)
{
k = w;
min = dist[w]; // w顶点离v0顶点更近
}
}
final[k] = 1; // 将目前找到的最近的顶点置为1
for (w = 0; w < G.vexNum; w++) // 修正当前最短路径及距离
{
/* 如果经过v顶点的路径比现在这条路径的长度短的话 */
if (!final[w] && (min + G.Edge[k][w] < dist[w]))
{
/* 找到了更短的路径,修改D[w]和P[w] */
dist[w] = min + G.Edge[k][w]; // 修改当前路径长度
path[w] = k;
}
}
}
}上面数组final[]保存已有路径的结点,有最短路径的结点的值为 1,无最短路径的结点的值为 0,path[]数组记录结点 V 的前驱结点,dist[]数组,记录结点 V 的前驱结点。
首先进行初始化,final[]数组的元素的值均为 0,path[]数组的值均为 -1,当path[i]=-1时,说明此结点的前驱结点即是源点V,dist[]的元素值初始化为源点V到邻接点的距离。
接着进入for循环,for循环内的第一个for循环用于找到 dist[] 数组的最小值。
for循环内的第二个for循环用于进行修正。
以上便是Dijkstra算法函数的基本内容。三大块——初始化,找dist[]最小元素、修正路径。
人生是一场无休、无歇、无情的战斗,凡是要做个够得上称为人的人,都得时时向无形的敌人作战。 ——罗曼·罗兰
以此句献给看这篇博客的每一个人。