第J2周:ResNet50V2算法实战与解析
- 本文为365天深度学习训练营 中的学习记录博客
- 参考文章:365天深度学习训练营-第J2周:ResNet50V2算法实战与解析
- 原作者:K同学啊|接辅导、项目定制
目录
-
- 一、论文解读
-
- 1. ResNetV2结构与ResNet结构对比
- 2. 关于残差结构的不同尝试
- 3. 关于激活的尝试
- 二、模型复现
-
- 1. Residual Block
- 2. 堆叠Residual Block
- 3. ResNet50V2架构复现
- 4. 在cifar10上训练
本周任务:
●1.请根据本文 TensorFlow 代码,编写出相应的 Pytorch 代码(建议使用上周的数据测试一下模型是否构建正确)
●2.了解ResNetV2与ResNetV的区别
●3.改进思路是否可以迁移到其他地方呢(自由探索)
一、论文解读
1. ResNetV2结构与ResNet结构对比
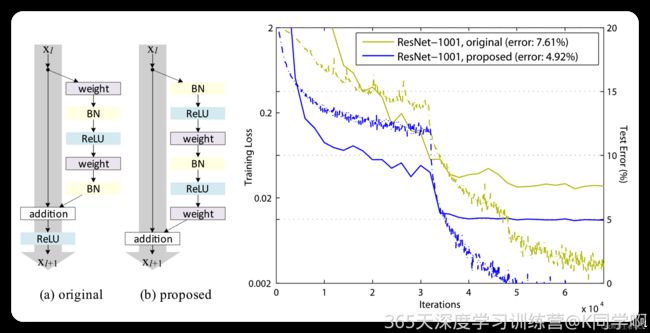
实线表示测试误差(右边的y轴),虚线表示训练损失(左边的y轴),Iterations 表示迭代次数
改进点:(a)original 表示原始的 ResNet 的残差结构,(b)proposed 表示新的 ResNet 的残差结构。主要差别就是(a)结构先卷积后进行 BN 和激活函数计算,最后执行 addition 后再进行ReLU 计算; (b)结构先进行 BN 和激活函数计算后卷积,把 addition 后的 ReLU 计算放到了残差结构内部。
改进结果:作者使用这两种不同的结构在 CIFAR-10 数据集上做测试,模型用的是 1001层的 ResNet 模型。从图中结果我们可以看出,(b)proposed 的测试集错误率明显更低一些,达到了 4.92%的错误率,(a)original 的测试集错误率是 7.61%。
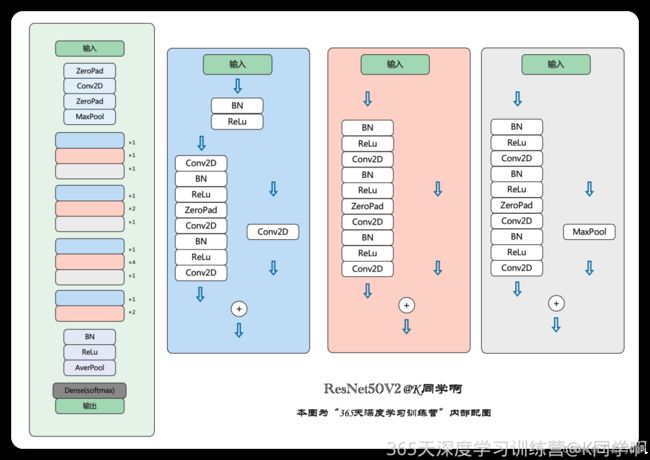
2. 关于残差结构的不同尝试
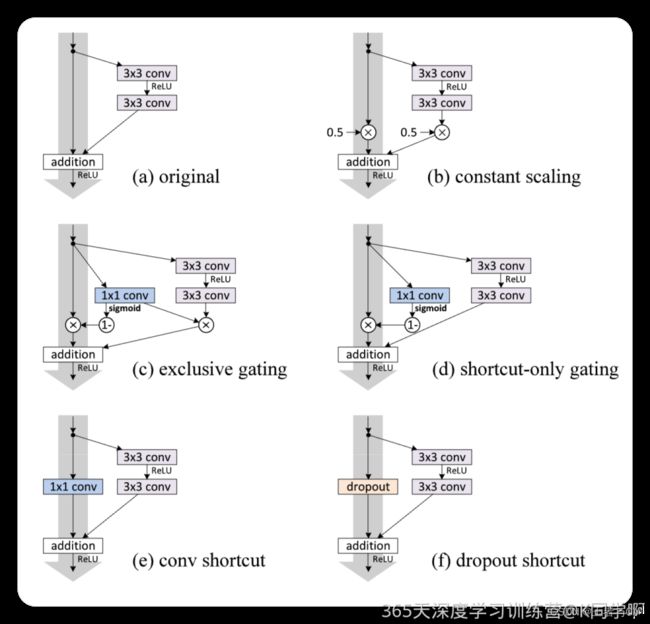
(b-f)中的快捷连接被不同的组件阻碍。为了简化插图,我们不显示BN层,这里所有单位均采用权值层之后的BN层。图中(a-f)都是作者对残差结构的 shortcut 部分进行的不同尝试 ,作者对不同 shortcut 结构的尝试结果如下表所示 。
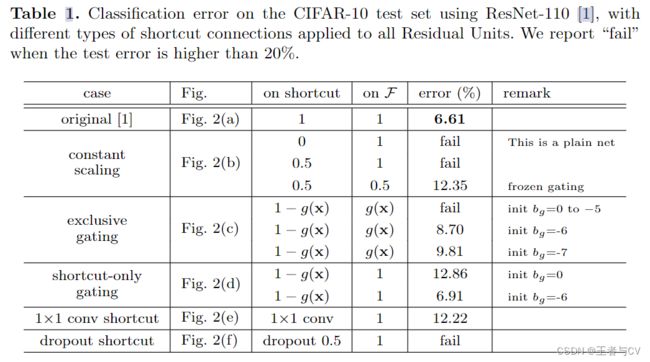
使用ResNet-110在CIFAR-10测试集上的分类错误,对所有残差单元应用了不同类型的shortcut connections。当测试误差高于20%时,标注为“fail”。
作者用不同 shortcut 结构的 ResNet-110 在 CIFAR-10 数据集上做测试,发现最原始的(a)original 结构是最好的,也就是 identity mapping 恒等映射是最好的。
3. 关于激活的尝试
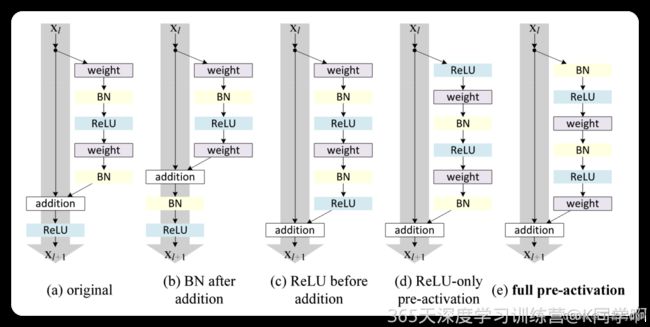
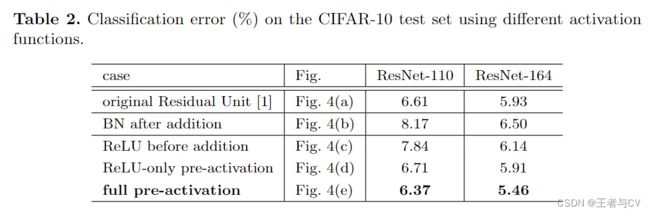
使用不同激活函数的CIFAR-10测试集上的分类误差(%)。
最好的结果是(e)full pre-activation,其次到(a)original。
二、模型复现
import torch
import torch.nn as nn
import torchvision.transforms as transforms
import torchvision
from torchvision import transforms, datasets
import os, PIL, pathlib, warnings
from torchsummary import summary
#忽略警告信息
warnings.filterwarnings("ignore")
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
1. Residual Block
class Block2(nn.Module):
def __init__(self, in_channel, filters, kernel_size=3, stride=1, conv_shortcut=False):
super(Block2, self).__init__()
self.preact = nn.Sequential(
nn.BatchNorm2d(in_channel),
nn.ReLU(True)
)
self.shortcut = conv_shortcut
if self.shortcut:
self.short = nn.Conv2d(in_channel, 4*filters, 1, stride=stride, padding=0, bias=False)
elif stride>1:
self.short = nn.MaxPool2d(kernel_size=1, stride=stride, padding=0)
else:
self.short = nn.Identity()
self.conv1 = nn.Sequential(
nn.Conv2d(in_channel, filters, 1, stride=1, bias=False),
nn.BatchNorm2d(filters),
nn.ReLU(True)
)
self.conv2 = nn.Sequential(
nn.Conv2d(filters, filters, kernel_size, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(filters),
nn.ReLU(True)
)
self.conv3 = nn.Conv2d(filters, 4*filters, 1, stride=1, bias=False)
def forward(self, x):
x1 = self.preact(x)
if self.shortcut:
x2 = self.short(x1)
else:
x2 = self.short(x)
x1 = self.conv1(x1)
x1 = self.conv2(x1)
x1 = self.conv3(x1)
x = x1 + x2
return x
2. 堆叠Residual Block
class Stack2(nn.Module):
def __init__(self, in_channel, filters, blocks, stride=2):
super(Stack2, self).__init__()
self.conv = nn.Sequential()
self.conv.add_module(str(0), Block2(in_channel, filters, conv_shortcut=True))
for i in range(1, blocks-1):
self.conv.add_module(str(i), Block2(4*filters, filters))
self.conv.add_module(str(blocks-1), Block2(4*filters, filters, stride=stride))
def forward(self, x):
x = self.conv(x)
return x
3. ResNet50V2架构复现
class ResNet50V2(nn.Module):
def __init__(self,
include_top=True, # 是否包含位于网络顶部的全链接层
preact=True, # 是否使用预激活
use_bias=True, # 是否对卷积层使用偏置
input_shape=[224, 224, 3],
classes=1000,
pooling=None): # 用于分类图像的可选类数
super(ResNet50V2, self).__init__()
self.conv1 = nn.Sequential()
self.conv1.add_module('conv', nn.Conv2d(3, 64, 7, stride=2, padding=3, bias=use_bias, padding_mode='zeros'))
if not preact:
self.conv1.add_module('bn', nn.BatchNorm2d(64))
self.conv1.add_module('relu', nn.ReLU())
self.conv1.add_module('max_pool', nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
self.conv2 = Stack2(64, 64, 3)
self.conv3 = Stack2(256, 128, 4)
self.conv4 = Stack2(512, 256, 6)
self.conv5 = Stack2(1024, 512, 3, stride=1)
self.post = nn.Sequential()
if preact:
self.post.add_module('bn', nn.BatchNorm2d(2048))
self.post.add_module('relu', nn.ReLU())
if include_top:
self.post.add_module('avg_pool', nn.AdaptiveAvgPool2d((1, 1)))
self.post.add_module('flatten', nn.Flatten())
self.post.add_module('fc', nn.Linear(2048, classes))
else:
if pooling=='avg':
self.post.add_module('avg_pool', nn.AdaptiveAvgPool2d((1, 1)))
elif pooling=='max':
self.post.add_module('max_pool', nn.AdaptiveMaxPool2d((1, 1)))
def forward(self, x):
x = self.conv1(x)
x = self.conv2(x)
x = self.conv3(x)
x = self.conv4(x)
x = self.conv5(x)
x = self.post(x)
return x
model = ResNet50V2().to(device)
summary(model, (3, 224, 224))
4. 在cifar10上训练
import torchvision.datasets as datasets
import torchvision.transforms as transforms
# 定义预处理转换
transform = transforms.Compose([
transforms.ToTensor(), # 将 PIL 图像转换为张量
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5)) # 归一化
])
# 加载 CIFAR-10 数据集
train_dataset = datasets.CIFAR10(root='./data', train=True, download=True, transform=transform)
test_dataset = datasets.CIFAR10(root='./data', train=False, download=True, transform=transform)
# 创建数据加载器
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=64, shuffle=True)
test_loader = torch.utils.data.DataLoader(test_dataset, batch_size=64, shuffle=False)
def train(dataloader,model,loss_fn,optimizer):
size = len(dataloader.dataset)
num_batches = len(dataloader)
train_loss,train_acc = 0,0
for x,y in dataloader:
x,y = x.to(device),y.to(device)
pred = model(x)
loss = loss_fn(pred,y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
train_loss += loss.item()
train_acc += (pred.argmax(1)==y).type(torch.float).sum().item()
train_loss /= num_batches
train_acc /= size
return train_loss,train_acc
def test(dataloader,model,loss_fn):
size = len(dataloader.dataset)
num_batches = len(dataloader)
test_loss,test_acc = 0,0
with torch.no_grad():
for x,y in dataloader:
x,y = x.to(device),y.to(device)
pred = model(x)
loss = loss_fn(pred,y)
test_loss += loss.item()
test_acc += (pred.argmax(1)==y).type(torch.float).sum().item()
test_loss /= num_batches
test_acc /= size
return test_loss,test_acc
参考文章:http://t.csdn.cn/VhPbf