AUTOSAR简介
1. 简介
AUTOSAR全称为“AUTomotive Open System ARchitecture”,译为“汽车开放系统体系结构”;
AUTOSAR是一家由汽车电子、半导体和软件行业的汽车制造商、供应商、服务提供商等公司组成的全球开发合作伙伴组织;
AUTOSAR定义了三个文档组:Classic Platform(CP)、Adaptive Platform(AP)和Foundation(FO),基于CP和AP的ECU基于共同标准FO实现彼此连接;
来自一个技术人的学习建议:
Q:初次学习AUTOSAR应该从哪些文件入手呢?
A:AUTOSAR是一个庞大的标准,包含了超过200份规范和20000个需求。建议从阅读标准中的Layed Software Architecture文档入手。接下来可以学习AUTOSAR方法论规范(Methodology)。在接下来就是有选择性的阅读AUTOSAR模板规范(TPS)和BSW的软件规范(SWS)了。
2. AUTOSAR核心思想
AUTOSAR提倡“在标准上合作,在实现上竞争”原则;
AUTOSAR核心思想是“统一标准,分散实现、集中配置”,即统一的开放平台、软件系统层次化模块化,降低应用与平台耦合性、统一格式的配置信息,集中配置生成系统;
一个汽车电子应用系统可包含多个相互关联的AUTOSAR组件。组件通过虚拟功能总线(VFB)提供标准通信机制与服务,实现平台无关性;
3. AUTOSAR功能
主要功能,如下图所示:

- 汽车功能可用性与安全性需求
- 保持汽车电子系统一定冗余;
- 可移植到不同汽车的不同平台;
- 将标准的基本系统功能转化为标准软件模块;
- 通过网络共享软件功能;
- 集成多个开发商提供的软件模块;
- 更好的进行软件维护;
- 充分利用硬件平台处理能力;
- 汽车电子软件的更新与升级;
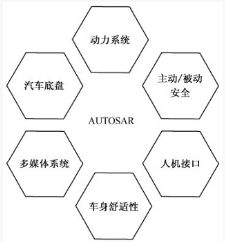
AUTOSAR在汽车领域的应用,如下图所示:
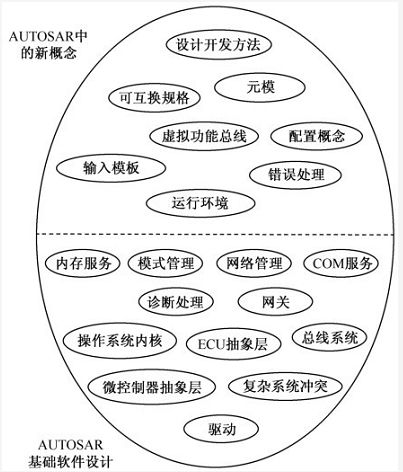
AUTOSAR模块功能,如下图所示:
4. AUTOSAR标准分类
4.1 Classic Platform(CP)
CP框架进行方法(软件开发作业的流程和输入输出的形式的定义)以及应用程序接口(API)的标准化;
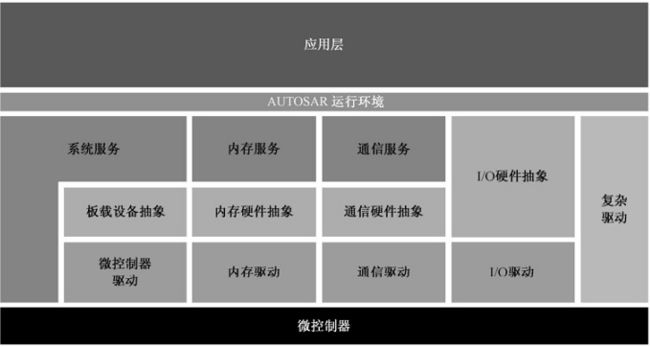
CP架构在最高抽象级别上区分了在微控制器上运行的三个软件层:应用程序、运行时环境 (RTE) 和基本软件 (BSW):
- 应用软件层大多独立于硬件;
- 软件组件之间的通信通过RTE访问BSW;
- RTE表示应用程序的完整接口;
- BSW分为三个主要层和复杂驱动因素:服务、ECU抽象、微控制器抽象,服务分为代表系统、内存、通信服务基础结构;

4.2 Adaptive Platform(AP)
AP实现了 AUTOSAR Runtime for Adaptive Applications (ARA);
Adaptive标准主要针对自动驾驶和娱乐系统应用相关的标准;
AP有两种类型的接口可用:服务和 API;
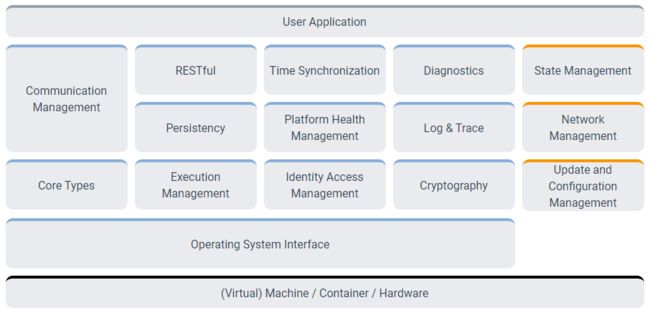
AP模块结构,如下图所示:
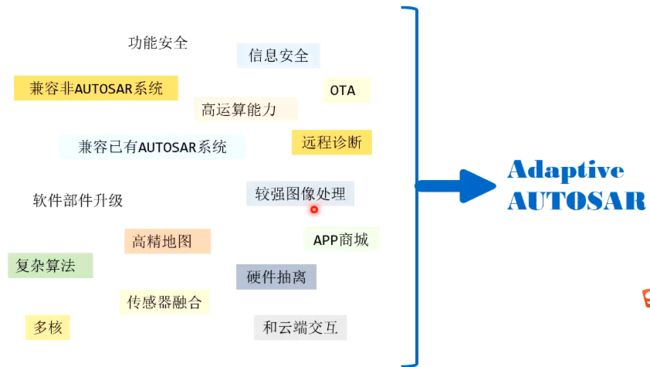
AP功能概述(图片来源于“搞一下汽车电子”):
4.3 Foundation(FO)
FO目的是在 AUTOSAR 平台之间实现互操作性;
FO包含AUTOSAR平台之间共享的常见要求和技术规范;

4.4 Acceptance Test Classic Platform(AT)

4.5 Application Interface(AI)

5. AUTOSAR 软件架构

5.1 应用层
应用层包括应用软件组件、传感器、执行器软件组件;
应用层软件组件通过RTE进行内部通信和ECU资源访问;
5.2 运行环境层
RTE层与ECU、具体应用相关,应该为每个ECU分别实现;
RTE层为组件之间的通信提供了支持;
RTE层实现应用软件与硬件的无关性;
5.3 系统服务层
系统服务层包括通信、服务、操作系统,如操作系统服务、汽车网络管理、管理服务、存储服务、诊断服务、ECU状态管理;
系统服务层的实现与微控制器、ECU、具体应用相关;
5.3.1 操作系统
AUTOSAR操作系统不但以OSEK/VDX系统作为基础,同时也做了功能扩展,如下:
- 核心功能添加了软硬件计数器、带有时间同步的任务表、堆栈监控功能;
- 保护功能添加了时间同步保障、内存保护、服务保护、操作系统应用(任务执行、中断、延时、确定功能)、确定与非确定代码功能;
->时间同步保障:实现系统任务表时间同步、对芯片时间片的静态分配;
->内存保护:堆栈、私有数据、代码端的保护,分离不同应用程序在内存的物理位置;
->服务保护:避免错误、破坏性的系统调用;
->确定与非确定代码功能:确定代码可五点调用系统应用,不确定代码只能在一定限制下调用;
操作系统的扩展属性分级,如下:
- 扩展等级1:运用于普通的实时操作系统,包括任务管理、事件触发机制、计数、定时、消息传递等;
- 扩展等级2:OSEK系统和时间同步保障,有响应快、延时少、精准度搞;
- 扩展等级3:OSEK系统和内存保护,保障系统运行中不发生内存冲突;
- 扩展等级4:OSEK系统和时间同步保障、内存保护系统组成;
操作系统实现要求,如下:
- 静态配置;
- 实时系统特性;
- 优先级机制;
- 运行可靠,有自维护功能;
- 系统开销小,不需要外部资源;
5.4 微控制器抽象层
微控制器抽象层实现的不同硬件接口的统一,实现了对硬件的封装;
微控制器抽象层包括控制器驱动、管理微控制器的外设,如DIO、ADC、PWM、EEPROM、Flash、CCU、SPI、I2C等驱动;
5.5 复杂驱动模块
复杂驱动模块是复杂传感器和执行器操作模块的映射;
6. 软件框架
软件框架包括SWC、RTE、BS三个模块,模块定义如下:
SWC:应用层软件标准的定义;
RTE:应用层和基础层的接口;
BS:硬件驱动、网络通信、实时任务调度等底层服务程序,:BS又分为以下4个部分:
- 服务层
- ECU抽象层
- 微控制器层
- 复杂驱动层
软件架构的详细划分,如下图所示:
6.1 SWC
6.1.1 SWC概念
SWC是封装的、规范的、可重用的软件模块;
SWC是组织系统的基础单位;
SWC由核心功能(构建功能执行代码)、端口(输入端口和输出端口)、接口(VFB支持的两种通信接口,C/S通信接口和S/R通信接口)组成,如下图所示:
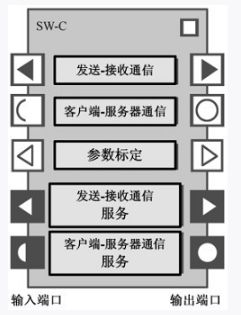
- AUTOSAR一个功能可由多个SWC组成;
- 每个SWC封装某个应用的部分功能;
- 所有的SWC都必须映射到唯一的物理ECU中;
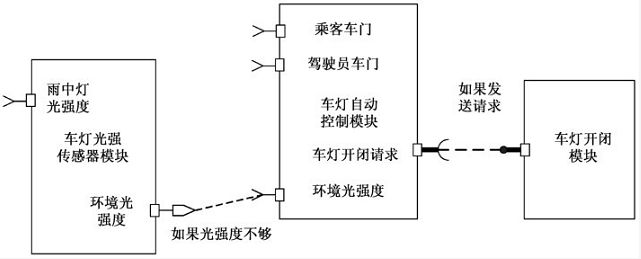
SWC功能**<示例>**,如下图所示:
6.1.2 SWC要求
- 所需数据与所能提供数据
- 运行时需要的系统资源
- 对基础硬件和软件的要求
- 实现的功能
6.1.3 SWC独立性
- MCU型号无关
- 映射方式无关
- 与其他SWC位置无关
- 与系统中的SWC个数无关
6.2 RTE
RTE是ECU内部和ECU之间的信息交互中心;
RTE提供了通信抽象层,相同的接口与服务让不同ECU内部模块及ECU之间实现信息共享;
RTE将针对特定的ECU或系统配置进行裁剪(具体要求视ECU而定);
6.3 BS
BS为SWC提供了基本服务;
BS处理标准规范和ECU自带功能模块,还包括服务(诊断协议、NVRAM、Flash和内存管理)、通信(网络框架(CAN、LIN、FlexRay)、I/O管理、网络管理)等;
BS结构,如下图所示:
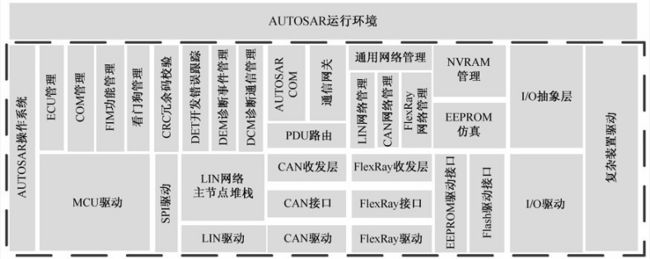
注:OSEK基础标准包括:实时操作系统(OSEK-OS)、通信子系统(OSEK-COM)、网络管理系统(OSEK-NM);
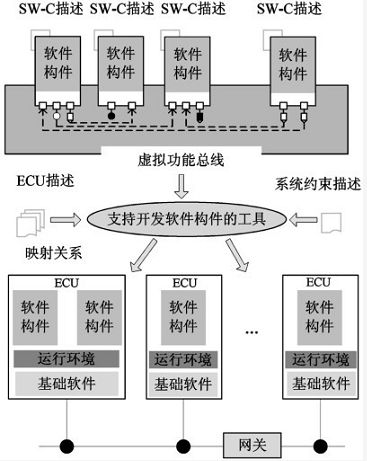
6.4 VFB
VFB将软件构件间、软件构件与基础软件间的通信进行了抽象;
VFB是虚拟硬件和独立映射系统的集合;
VFB为构件提供了标准的通信机制和服务;
VFB包含SWC标准化接口、设备驱动(底层软件中实现)、ECU抽象层(底层软件中实现)、AUTOSAR服务(底层软件中实现);
VFE的特点,如下:
- 所有的VFB都连接在VFB上;
- VFB保证SWC之间、SWC与ECU之间的可靠通信;
- VFB是SWC独立于硬件的基础;
- VFB简化了SWC的设计;
VFB通信方式,如下:
- C-S通信
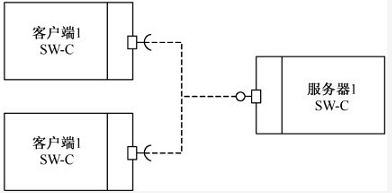
- S-R通信
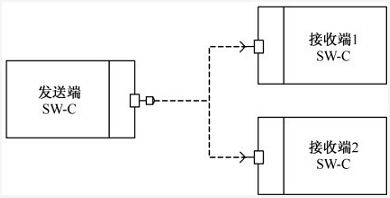
VFB结构原理图,如下所示:
7. AUTOSAR接口分类
AUTOSAR支持三种不同的接口,分别是AUOSAR接口、标准化AUTOSAR接口、标准化接口;如下图所示:

AUOSAR接口:描述原件接收和发送的数据和服务;
标准AUOSAR接口:AUOSAR框架定义的接口;
标准化接口:软件中具有的API;
基于AUTOSAR的ECU软件结构,如下图所示:

8. 规范与标准
8.1 SOME/IP
-
AUTOSAR_PRS_SOMEIPProtocol.pdf
Scalable service-Oriented MiddlewarE over IP简称为SOME/IP,译为“基于IP可扩展的服务中间件”;
属于AUTOSAR Foundation(FO)部分;
该文档定义了SOME/IP协议规范,包括消息格式、传输标准等。 -
AUTOSAR_PRS_SOMEIPServiceDiscoveryProtocol.pdf
SOMEIP Service Discovery简称为SOME/IP-SD,译为“SOME/IP服务发现”;
属于AUTOSAR Foundation(FO)部分;
该文档定义了SOME/IP-SD协议规范,SOME/IP-SD是基于SOME/IP进行实现的。 -
AUTOSAR_SWS_SOMEIPTransportProtocol.pdf
SOME IP Transport Protocol简称为SOME/IP-TP,译为“SOME/IP传输协议”;
属于AUTOSAR Classic Platform(CP)部分;
该文档定义了大SOME/IP数据包的分段与重组规范,以及SOME/IP-TP实现方法与接口标准。 -
AUTOSAR_SWS_SOMEIPTransformer.pdf
SOME IP Transformer简称为SOME/IP Transformer,译为“SOME/IP装换器”;
属于AUTOSAR Classic Platform(CP)部分,是对“序列化”部分的一个补充;
该文档定义Transformer的实现,实现可配置的数据序列化和反序列化; -
AUTOSAR_SWS_ServiceDiscovery.pdf
Service Discovery简称SD,译为“服务发现”;
属于AUTOSAR Classic Platform(CP)部分;
定义了AUTOSAR的SD软件规范; -
AUTOSAR_PRS_TestabilityProtocolAndServicePrimitives.pdf
Test ability Protocol And Service Primitives译为“测试能力协议和服务原语”;
UpperTester简称为UT,译为“上限测试”;
属于AUTOSAR Classic Platform(CP)部分;
该文档定义了UT基于以太网传输的通信指令格式,该控制指令默认使用的是UDP:1000进行传输,指令格式使用类似SOME/IP的格式进行封装。
汽车以太网测试之UpperTester
参考文章
汽车电子与软件 - 系列分享
详解AUTOSAR分层架构与软件组件
该文章中的绝大部分内容来自:微信读书《汽车嵌入式系统原理、设计与实现》- AUTOSAR体系简介,此处仅仅作为一个知识的传播;