6.2.tensorRT高级(1)-第一个完整的分类器程序
目录
-
- 前言
- 1. CNN分类器
- 2. 补充知识
-
- 2.1 知识点
- 2.2 智能指针封装
- 总结
前言
杜老师推出的 tensorRT从零起步高性能部署 课程,之前有看过一遍,但是没有做笔记,很多东西也忘了。这次重新撸一遍,顺便记记笔记。
本次课程学习 tensorRT 高级-第一个完整的分类器程序
课程大纲可看下面的思维导图
1. CNN分类器
这节课我们学习 tensorRT 高级篇案例——CNN分类器
先来看下代码,gen_onnx.py 是推理一个 resnet18 的 ImageNet 分类器模型,打印其推理结果,并导出 onnx 模型,其具体内容如下:
import torch
import torchvision
import cv2
import numpy as np
class Classifier(torch.nn.Module):
def __init__(self):
super().__init__()
#使用torchvision自带的与训练模型, 更多模型请参考:https://tensorvision.readthedocs.io/en/master/
self.backbone = torchvision.models.resnet18(pretrained=True)
def forward(self, x):
feature = self.backbone(x)
probability = torch.softmax(feature, dim=1)
return probability
# 对每个通道进行归一化有助于模型的训练
imagenet_mean = [0.485, 0.456, 0.406]
imagenet_std = [0.229, 0.224, 0.225]
image = cv2.imread("workspace/dog.jpg")
image = cv2.resize(image, (224, 224)) # resize
image = image[..., ::-1] # BGR -> RGB
image = image / 255.0
image = (image - imagenet_mean) / imagenet_std # normalize
image = image.astype(np.float32) # float64 -> float32
image = image.transpose(2, 0, 1) # HWC -> CHW
image = np.ascontiguousarray(image) # contiguous array memory
image = image[None, ...] # CHW -> 1CHW
image = torch.from_numpy(image) # numpy -> torch
model = Classifier().eval()
with torch.no_grad():
probability = model(image)
predict_class = probability.argmax(dim=1).item()
confidence = probability[0, predict_class]
labels = open("workspace/labels.imagenet.txt").readlines()
labels = [item.strip() for item in labels]
print(f"Predict: {predict_class}, {confidence}, {labels[predict_class]}")
dummy = torch.zeros(1, 3, 224, 224)
torch.onnx.export(
model, (dummy,), "workspace/classifier.onnx",
input_names=["image"],
output_names=["prob"],
dynamic_axes={"image": {0: "batch"}, "prob": {0: "batch"}},
opset_version=11
)
我们使用的 resnet18 来自于 torchvision.models,它的输出值并不是一个概率值,需要再加上一个 softmax 函数才行,因此我们自己实现了一个类顺便把 softmax 操作也添加进去,减少后处理的复杂度,导出的 onnx 包含后处理直接输出概率值
接下来就是对输入图像进行预处理操作,得到一个 image 的 tensor 放到网络中推理,前面有提到图像预处理的操作可以用 warpAffine 来实现,一个核函数解决所有操作,使得其性能足够高,效果足够好
值的注意的是,在 onnx 导出时有两个细节,一个是输入和输出的动态维度都只指定 batch 动态,宽高不动态,另一个是 optset 的版本指定为 11
运行效果如下:

我们接下来到 C++ 里面看下 tensorRT 是怎么处理 CNN 分类器的推理过程的,代码如下:
// tensorRT include
// 编译用的头文件
#include 由于是通过 onnx 模型构建网络,因此要包含 NvOnnxParser,依然使用的是我们自定义的源代码,而不是通过 libnvonnxparser.so 库文件来解析
先来看模型构建 build_model 与之前不同的是对于 tensorRT API 的指针我们又套了一层,通过 make_nvshared() 函数来实现创建 tensorRT 对象的智能指针,它可以自动管理其所指向的对象的生命周期,实现内存的自动释放,这是 make_nvshared 完成的工作,其它流程与之前都一样
再来看下 inference,之前的输入都是手动给的,这次需要给定一张图像,首先需要根据输入图像的大小分配 Host 和 Device 的大小,接下来需要读取图片完成与 pytorch 一致的预处理过程
预处理代码如下:
// BGR -> RGB
// (pixel / 255.0 - mean) / std
// to tensor -> BGRBGRBGR -> BBBGGGRRR
cv::resize(image, image, cv::Size(input_width, input_height));
int image_area = image.cols * image.rows;
unsigned char* pimage = image.data;
float* phost_b = input_data_host + image_area * 0;
float* phost_g = input_data_host + image_area * 1;
float* phost_r = input_data_host + image_area * 2;
for(int i = 0; i < image_area; ++i, pimage += 3){
// 注意这里的顺序rgb调换了
*phost_r++ = (pimage[0] / 255.0f - mean[0]) / std[0];
*phost_g++ = (pimage[1] / 255.0f - mean[1]) / std[1];
*phost_b++ = (pimage[2] / 255.0f - mean[2]) / std[2];
}
它具体是如何实现的呢?我们可以看下图:
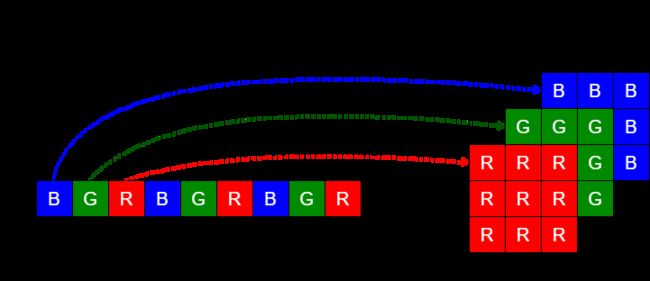
opencv 的图像格式如左边的图所示,BGRBGRBGR… 这样连续的,而我们实际想要的是右边的效果就是一个通道一个通道的排列起来
那你可能有所困惑,右图中 phost_b 的地址中为什么填充的都是 R 像素值,而反观 phost_r 的地址中填充的都是 B 像素值?是不是画错了?那是没有画错的,在程序中它其实是有故意把 R 像素值填充到 b 通道的,而把 B 像素值填充到 r 通道的,这样做的目的当然就是 bgr2rgb 这个预处理操作啦
我们需要转换的首地址当然就是 input_data_host,先取得 b 通道的首地址 phost_b,然后通过图像面积的偏移量分别获取 phost_g、phost_r,然后将 opencv 对应的 b,g,r 分别塞到对应的地方就行,在这个过程中由于是直接对像素进行操作,因此非常容易实现诸如 BRG2RGB、/255.0、减均值除标准差等各种预处理操作,简单且高效,非常值得学习。
input_data_host 的处理完成后可以将预处理好的图像数据拷贝到 input_data_device 上面,input_data_device 准备好了之后,可以开始准备 output_device 了,根据模型预测的 1000 个类别数分配一个 output_data_device 的空间,分配好之后,可以指定下推理的 batch 数目,然后指定下 bingding 的输入和输出,把它塞到 enqueueV2 中就可以去进行推理了,推理完成之后将推理结果从 output_data_device 拷贝到 output_data_host 上面,接下来做一个流同步,等待所有操作结束就好了。
整个流程图如下所示:
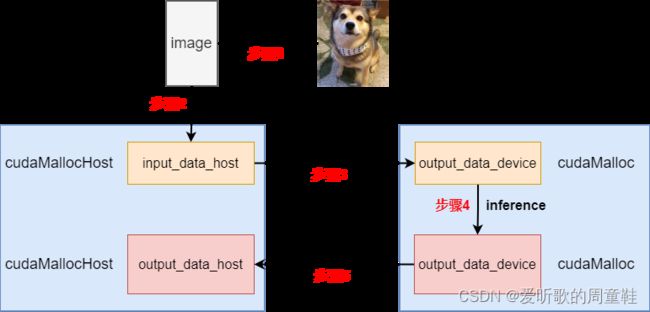
从上面流程可以看到整个过程非常清晰,而典型的 CUDA 核函数程序的执行流程和上述差不多,无非是包含以下几个步骤:
1. 分配 host 内存,并进行数据的初始化
2. 分配 device 内存,并从 host 将数据拷贝到 device 上
3. 调用 CUDA 的核函数在 device 上完成指定的计算
4. 将 device 上的运算结果拷贝到 host 上
5. 释放 device 和 host 上分配的内存
最终的 output_data_host 就是我们想要的概率值,通过 1000 个类别的概率值可以拿到最大概率值对应的标签,然后将其打印出来,输出结果如下:
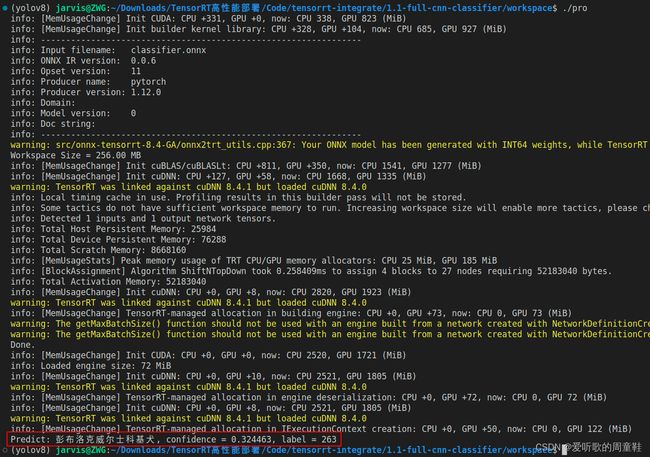
可以看到和 python 结果一致,说明我们整个中间过程没有任何问题,这就是分类器这个案例,上述代码的重点是预处理,对预处理的理解有利于后续实现 CUDA 核上的并发方式
2. 补充知识
对于上述代码的分析,你需要知道:
1. 模型里面没有 softmax 操作,在这里采用包裹一层加上 softmax 节点后再导出模型,这样使得后处理得到的直接就是概率值,避免后处理上再做 softmax
2. 在 c++ 代码中,则充分采用指针偏移的方式,提升 cpu 上预处理的效率
3. 对于 bgr->rgb 也避免使用 cvtColor 实现,而是简单的改变赋值时的索引,提升效率
2.1 知识点
关于分类器案例的知识点:(from 杜老师)
1. 使用智能指针,对 tensorrt 返回值做封装,使得内存安全不会泄露
template<typename _T>
shared_ptr<_T> make_nvshared(_T* ptr){
return shared_ptr<_T>(ptr, [](_T* p){p->destroy();});
}
// [](_T* p){p->destroy();} 这里用 lambda 表达式的形式来表示 destroy 的方式
// 因为它常常需要 destroy 进行释放
2. 使用 cudaMallocHost 对输入的 host 进行分配,使得主机内存复制到设备效率更高
3. 注意推理时的预处理,指定了 rgb 与 bgr 对调
4. 如果需要多个图像推理,需要:
- 在编译时,指定 maxbatchsize 为多个图
- 在推理时,指定输入的 bindings shape 的 batch 维度为使用的图像数,要求小于等于 maxbatchsize
- 在收取结果的时候,tensor 的 shape 是 input 指定的 batch 大小,按照 batch 处理即可
2.2 智能指针封装
我们来简单聊下智能指针的封装,代码如下:
template<typename _T>
shared_ptr<_T> make_nvshared(_T* ptr){
return shared_ptr<_T>(ptr, [](_T* p){p->destroy();});
}
上述代码实现了一个模板函数,用于创建一个包含 NVIDIA TensorRT 对象的智能指针(例如 nvinfer1::ICudaEngine, nvinfer1::IExecutionContext 等)。这个智能指针的特点是,当它超出作用域或者没有任何引用时,它会自动删除其所指向的对象,从而避免内存泄漏。这是通过 C++ 的 std::shared_ptr 来实现的。
我们来具体分析下这段代码:
1. template:这是一个模板声明,表示这个函数可以接受任何类型的参数。_T 是一个占位符,表示函数接受的函数类型。_T 只是一种常见的命名约定,用于表示模板参数,你甚至可以起名叫做 ABC,这都没关系
2. shared_ptr<_T> make_nvshared(_T* ptr):这是函数声明,函数名为 make_nvshared,它接受一个指向 _T 类型的指针 ptr,并返回一个模板类 std::shared_ptr<_T>,它是一个智能指针,可以自动管理其所指向的对象的生命周期
3. return shared_ptr<_T>(ptr, [](_T* p){p->destroy();});:这是函数的主体部分,它创建并返回一个智能指针实例对象 std::shared_ptr<_T>。std::shared_ptr<_T> 的构造函数接受两个参数:第一个参数是它应该管理的对象的指针,第二个参数是一个删除器。删除器是一个函数或者可调用对象,当智能指针不再需要其所指向的对象时,它会调用删除器来删除这个对象。在这里,删除器是一个 lambda 表达式 [](_T p){p->destroy();}*,当智能指针不再需要其所指向的对象时,它会调用这个对象的 destroy 成员函数来删除它。
所以,这段代码的作用是创建一个智能指针,这个智能指针会自动删除其所指向的对象,从而避免内存泄漏。这是通过使用 std::shared_ptr 的删除器来实现的,删除器是一个 lambda 表达式,它调用对象的 destroy 成员函数来删除对象。
简单来说,上述代码实现了一个函数,接收一个指针,返回对应类型的智能指针实例对象。
有关共享智能指针相关的知识看参考苏老师的 shared_ptr
总结
本次课程学习了 tensorRT 高级篇的第一个案例-CNN分类器,在高级篇里面就要有高级篇的做法,因此我们使用智能指针对 tensorrt 对象的返回值进行了封装,防止内存的泄露。同时我们在 CPU 上也实现了一个高性能的预处理方法,直接对像素进行操作,可以同时把几个预处理操作都做了,对 CPU 的图像预处理操作的理解有利于我们后续实现 warpAffine CUDA 核函数。