《cuda c编程权威指南》04 - 使用块和线程索引映射矩阵索引
目录
1. 解决的问题
2. 分析
3. 方法
4. 代码示例
1. 解决的问题
利用块和线程索引,从全局内存中访问指定的数据。
2. 分析
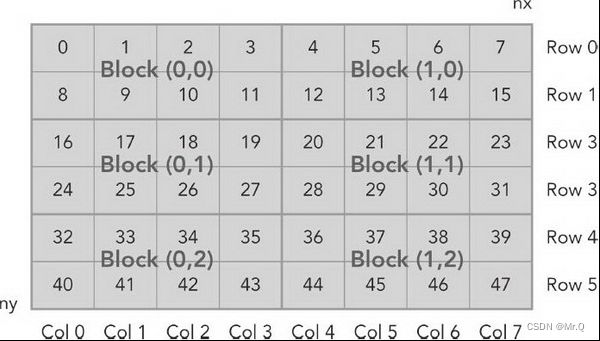
通常情况下,矩阵是用行优先的方法在全局内存中线性存储的。如下。

8列6行矩阵(nx,ny)=(8,6)。
3. 方法
这里建立二维网格(2,3)+二维块(4,2)为例,使用其块和线程索引映射矩阵索引。
(1)第一步,可以用以下公式把线程和块索引映射到矩阵坐标上;

(2)第二步,可以用以下公式把矩阵坐标映射到全局内存中的索引/存储单元上;
![]()
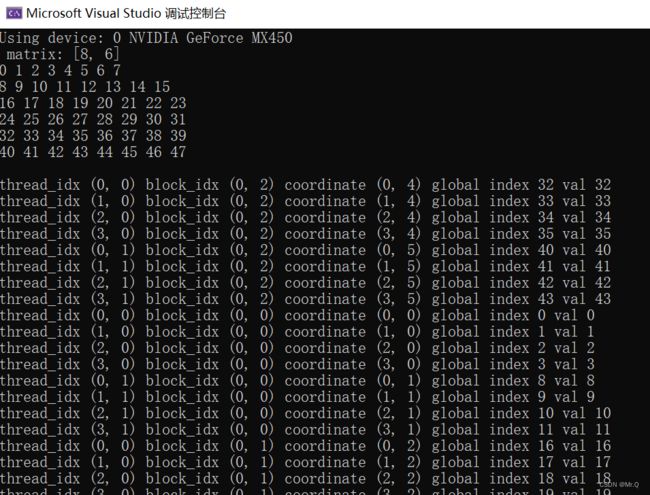
比如要获取矩阵元素(col,row) = (2,4) ,其全局索引是34,映射到矩阵坐标上,
ix = 2 + 0*3=2; iy = 0 + 2*2=4. 然后再映射到全局内存idx = 4*8 + 2 = 34.
4. 代码示例
#include "cuda_runtime.h"
#include "device_launch_parameters.h" // threadIdx
#include // io
#include // time_t
#include // rand
#include //memset
#define CHECK(call) \
{ \
const cudaError_t error_code = call; \
if (error_code != cudaSuccess) \
{ \
printf("CUDA Error:\n"); \
printf(" File: %s\n", __FILE__); \
printf(" Line: %d\n", __LINE__); \
printf(" Error code: %d\n", error_code); \
printf(" Error text: %s\n", \
cudaGetErrorString(error_code)); \
exit(1); \
} \
}
void initiaInt(int* p, const int N)
{
for (int i = 0; i < N; i++)
{
p[i] = i;
}
}
///
///
///
/// 全局内存中线性存储的二维矩阵
/// 列
///
void printMatrix(int* c, const int nx, const int ny)
{
int* ic = c;
printf("\n matrix: [%d, %d] \n", nx, ny);
for (int i = 0; i < ny; i++)
{
for (int j = 0; j < nx; j++)
{
int cur_ele = ic[i * nx + j];
printf("%d ", cur_ele);
}
printf("\n");
}
printf("\n");
}
///
///
///
/// 全局内存中是线性存储的
/// col
///
/// > > (d_Mat_a, nx, ny);
cudaDeviceSynchronize();
// free memory
cudaFree(d_Mat_a);
free(h_a);
// reset device
cudaDeviceReset();
return 0;
} 可以看到,全局索引值就是矩阵中存储的值。