STM32使用HAL库中外设初始化MSP回调机制及中断回调机制详解
STM32使用HAL库之Msp回调函数
1.问题提出
在STM32的HAL库使用中,会发现库函数大都被设计成了一对:
HAL_PPP/PPPP_Init
HAL_PPP/PPPP_MspInit
而且HAL_PPP/PPPP_MspInit函数的defination前面还会有__weak关键字
上面的PPP/PPPP代表常见外设的名称为3个字符或者4个字符
怎么理解这个设计呢?
2.问题分析
2.1 结论
首先说结论:
-
HAL_PPP/PPPP_Init 是与具体芯片(无论是STM32F4/F1/F7)无关的设置
-
HAL_PPP/PPPP_MspInit 是与具体芯片相关的配置(如STM32F429IGTx)
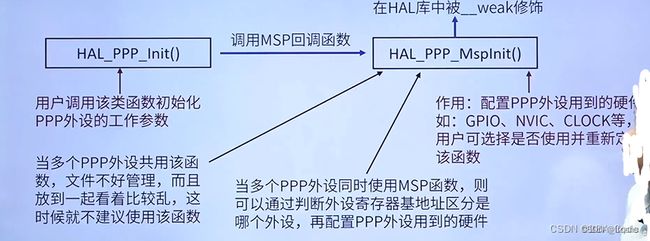
这样的设计是将不变的东西以库函数HAL_PPP/PPPP_Init的形式固定下来,而将需要用户根据
芯片进行编写的部分抽象成函数HAL_PPP/PPPP_MspInit的形式,用户只需要编写这部分函数
即可,这样做减少了用户的代码编写量
__weak关键字的使用是定义一个弱函数,这个函数的函数体通常是空的
方便用户重写一个自己的函数HAL_PPP/PPPP_MspInit,来覆盖之前库函数中定义的函数带有
__weak关键字的HAL_PPP/PPPP_MspInit函数,编译器在编译的时候,如果检查到有重名的
(但不含__weak关键字)HAL_PPP/PPPP_MspInit的函数,此时就会默认编译这个用户写的函数
2.2 实例分析
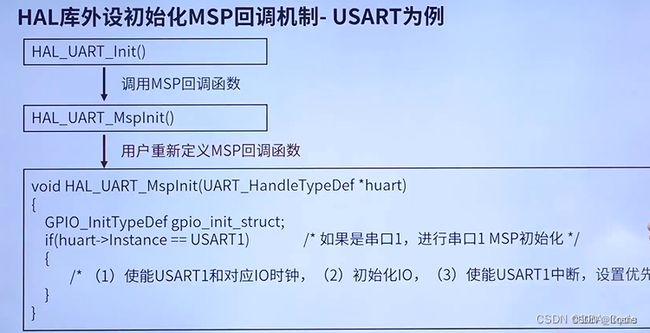
下面以串口通信为例进行分析:
在编写串口通信的代码的时候,常使用正点原子提供的usart.c&usart.h组合,正点原子在usart.c中
定义了HAL_UART_MspInit作为回调函数:
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
// GPIO configuration
GPIO_InitTypeDef GPIO_Initure;
if(huart->Instance==USART1)
{
__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA 时钟
__HAL_RCC_USART1_CLK_ENABLE(); // 使能USART1 时钟
GPIO_Initure.Pin=GPIO_PIN_9; //PA9
GPIO_Initure.Mode=GPIO_MODE_AF_PP; // AF复用,PP为推挽(push pull)
GPIO_Initure.Pull=GPIO_PULLUP; // 设置上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; // 设置为高速
GPIO_Initure.Alternate=GPIO_AF7_USART1; // 复用为USART1
HAL_GPIO_Init(GPIOA,&GPIO_Initure); // 初始化PA9
GPIO_Initure.Pin=GPIO_PIN_10; //PA10
HAL_GPIO_Init(GPIOA,&GPIO_Initure); // 初始化PA10
#if EN_USART1_RX
HAL_NVIC_EnableIRQ(USART1_IRQn); // 使能USART1中断通道
HAL_NVIC_SetPriority(USART1_IRQn,3,3); // 抢占优先级3, 子优先级3
#endif
}
}
这个库同时提供了一个调用串口初始化的接口:void uart_init(u32 bound) // bound为波特率
void uart_init(u32 bound)
{
//UART initialization
UART1_Handler.Instance=USART1; // USART1
UART1_Handler.Init.BaudRate=bound; // 设置波特率
UART1_Handler.Init.WordLength=UART_WORDLENGTH_8B; // 字长为8位的数据格式
UART1_Handler.Init.StopBits=UART_STOPBITS_1; // 一个停止位
UART1_Handler.Init.Parity=UART_PARITY_NONE; // 无奇偶校验位
UART1_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; // 无硬件流控
UART1_Handler.Init.Mode=UART_MODE_TX_RX; // 收发模式
HAL_UART_Init(&UART1_Handler); // HAL_UART_Init() 会使能UART1
HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);
// 该函数会开启接收中断,标志位UART_IT_RXNE,并设置接收缓冲以及接收缓冲的最大接收数量
}
这样在main函数中,首先调用函数uart_init()
然后uart_init()函数就会去调用HAL_UART_Init,这个函数就是HAL库中的函数
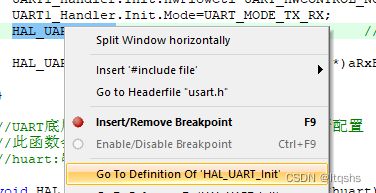
跳转到文件stm32f4xx_hal_uart.c,找到函数HAL_UART_Init的定义:
/**
* @brief Initializes the UART mode according to the specified parameters in
* the UART_InitTypeDef and create the associated handle.
* @param huart: pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @retval HAL status
*/
HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart)
{
/* Check the UART handle allocation */
if(huart == NULL)
{
return HAL_ERROR;
}
/* Check the parameters */
if(huart->Init.HwFlowCtl != UART_HWCONTROL_NONE)
{
/* The hardware flow control is available only for USART1, USART2, USART3 and USART6 */
assert_param(IS_UART_HWFLOW_INSTANCE(huart->Instance));
assert_param(IS_UART_HARDWARE_FLOW_CONTROL(huart->Init.HwFlowCtl));
}
else
{
assert_param(IS_UART_INSTANCE(huart->Instance));
}
assert_param(IS_UART_WORD_LENGTH(huart->Init.WordLength));
assert_param(IS_UART_OVERSAMPLING(huart->Init.OverSampling));
if(huart->gState == HAL_UART_STATE_RESET)
{
/* Allocate lock resource and initialize it */
huart->Lock = HAL_UNLOCKED;
/* Init the low level hardware */
HAL_UART_MspInit(huart);
}
huart->gState = HAL_UART_STATE_BUSY;
/* Disable the peripheral */
__HAL_UART_DISABLE(huart);
/* Set the UART Communication parameters */
UART_SetConfig(huart);
/* In asynchronous mode, the following bits must be kept cleared:
- LINEN and CLKEN bits in the USART_CR2 register,
- SCEN, HDSEL and IREN bits in the USART_CR3 register.*/
huart->Instance->CR2 &= ~(USART_CR2_LINEN | USART_CR2_CLKEN);
huart->Instance->CR3 &= ~(USART_CR3_SCEN | USART_CR3_HDSEL | USART_CR3_IREN);
/* Enable the peripheral */
__HAL_UART_ENABLE(huart);
/* Initialize the UART state */
huart->ErrorCode = HAL_UART_ERROR_NONE;
huart->gState= HAL_UART_STATE_READY;
huart->RxState= HAL_UART_STATE_READY;
return HAL_OK;
}
可以看到函数HAL_UART_Init中调用了函数HAL_UART_MspInit
在库文件中本身是有一个同名的使用__weak关键字定义的函数,
/**
* @brief UART MSP Init.
* @param huart: pointer to a UART_HandleTypeDef structure that contains
* the configuration information for the specified UART module.
* @retval None
*/
__weak void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(huart);
/* NOTE: This function Should not be modified, when the callback is needed,
the HAL_UART_MspInit could be implemented in the user file
*/
}
由于使用了正点原子的库,所以编译器在编译的时候就不会再编译这个HAL库自带的函数HAL_UART_MspInit
而是编译引入的库函数HAL_UART_MspInit
3. STM32程序的一般执行流程
由上面1.2节的分析,对于一个真实的STM32应用程序可以总结其运行一般执行(编写)流程如下:
以一个真实的点亮跑马灯的main.c为例进行分析(工程使用HAL库):
#include "sys.h"
#include "delay.h"
#include "usart.h"
void Delay(__IO uint32_t nCount);
void Delay(__IO uint32_t nCount)
{
while(nCount--){}
}
int main(void)
{
GPIO_InitTypeDef GPIO_Initure;
HAL_Init();
Stm32_Clock_Init(360,25,2,8);
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1;
GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP;
GPIO_Initure.Pull=GPIO_PULLUP;
GPIO_Initure.Speed=GPIO_SPEED_HIGH;
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
while(1)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET);
Delay(0x7FFFFF);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET);
Delay(0x7FFFFF);
}
}
这里插入正点原子的图进行解释:
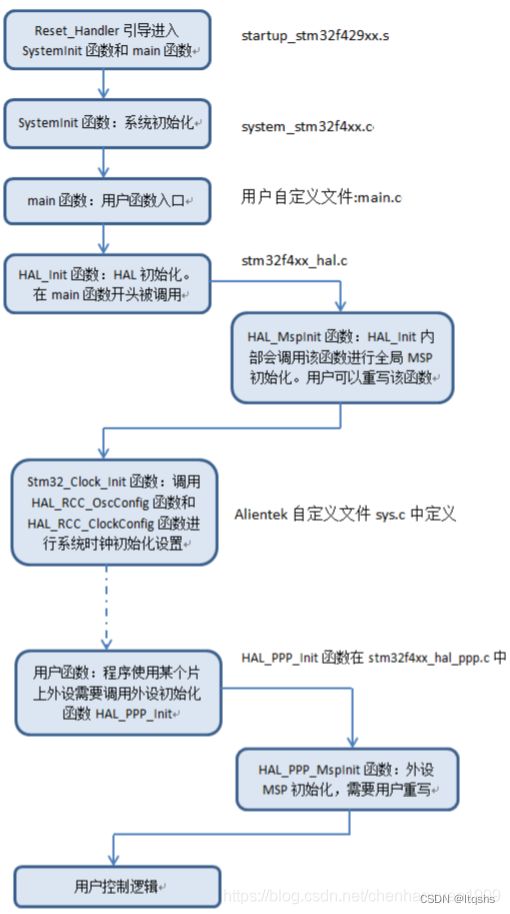
一个项目首先是引导程序先运行,汇编函数会引导SystemInit函数进行系统初始化的设置,再HAL库版本的项目中有这个函数的定义,在寄存器版本中通常会将汇编代码中引导SystemInit函数的语句删掉。然后引导程序会引导main函数,main函数被引导完成之后就会开始执行用户写的main函数中的代码。然后HAL_Init()函数会调用函数进行全局的MSP初始化,然后调用了正点原子提供的库函数Stm32_Clock_init函数,这个函数调用HAL_RCC_Oscconfig和HAL_RCC_ClockConfig函数进行系统时钟初始化,使用该函数需要导入SYSTEM库(正点原子提供),上面的一系列初始化都是常规操作,也就是每一个项目必做的系统的初始化。下面正式进入了用户自己编写得到逻辑,假设用户要使用PPP外设,那么就会调用HAL库中的函数HAL_PPP_Init,这个函数又会去尝试调用用户自定义的HAL_PPP_MspInit,然后进入用户自己定义的逻辑。
————————————————
原文链接:《[STM32] NOTE07-STM32使用HAL库之Msp回调函数理解》
STM32HAL库中外设初始化MSP回调机制及中断回调机制详解
我们开始学习HAL库的过程中,一定会发现与固件库开发中外设初始化流程和中断处理机制不相同,在这里将为大家解答一下心中的译文。
HAL外设初始化MSP回调机制
在外设初始化函数中,HAL_PPP_Init();中需配置外设的相关参数,外设用到的IO和NVIC和时钟等放到HAL_PPP_MspInit()回调函数中。初始化函数会自动调用回调函数.
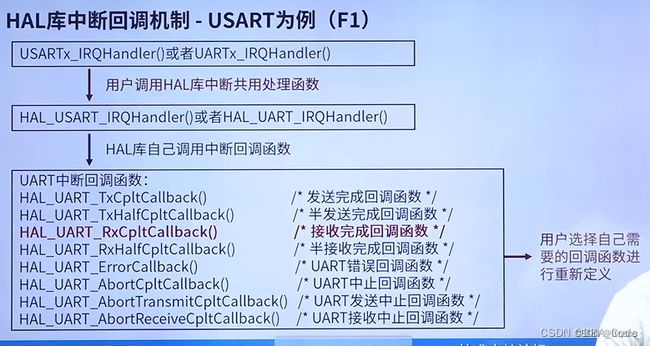
HAL库中断回调机制
HAL库中中断处理机制与固件库中不同,他是经过公共中断处理函数,自动调用中断处理回调函数。用户想要再中断中实现的逻辑代码则要放在回调函数中,而公共中断处理函数会帮你检测是否有中断发生,并帮你清除中断标志位。
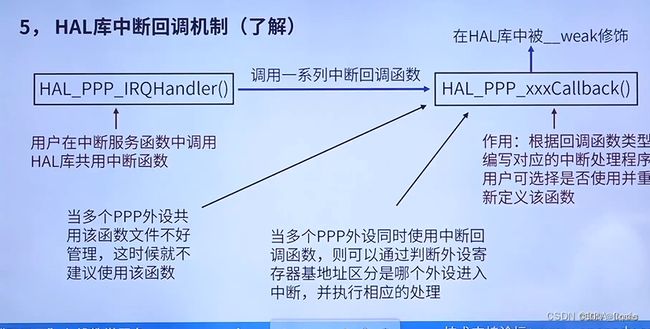
HAL_PPP_IRQHandler();公共中断处理函数,它会自动调用中断处理回调函数HAL_PPP_Callback()
用户要写在中断服务处理函数中的逻辑代码要放在回调函数中,公共中断处理函数会帮你清除中断标志,并且自动调用回调函数
参考原文:《STM32HAL库中外设初始化MSP回调机制及中断回调机制详解》