I2C协议->裸机程序->adapter驱动程序分析
开发板:mini2440
内核 :linux2.6.32.2
参考 :韦东山毕业班I2C视频教程
1、i2c协议简要分析
i2c中线是一种由 PHILIPS 公司开发的串行总线,用于连接微控制器及其外围设备,它具有以下特点。1、只有两条总线线路:一条串行数据线SDA,一条串行时钟线SCL。
2、每个连接到总线的器件都可以使用软件根据它的唯一的地址来确定。
3、传输数据的设备之间是简单的主从关系。
4、主机可以用作主机发送器或者主机接收器。
5、它是一个真正的多主机总线,两个或多个主机同时发起数据传输时,可以通过冲突检测和仲裁来防止数据被破坏。
6、串行的8位双向传输,位速在标准模式下可达 100kbit/s,在快速模式下可达400kbit/s,在高速模式下可待3.4Mbit/s。
7、片上的滤波器可以增加抗干扰能力,保证数据的完整性。
8、连接到同一总线上的IC数量只受到总线的最大电容400Pf的限制。

如上图所示,启动一个传输时,主机先发送一个S信号,然后发送8位数据。这8位数据的前7位为从机地址,第八位表示传输的方向(0表示写,1表示读),如果有数据则继续发送,最后发出P信号停止。

信号类型:
注意:正常数据传输时,SDA 在 SCL 为低电平时改变,在 SCL 为高电平时保持稳定。开始信号 S 信号:
SCL 为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号 P 信号:
SCL 为高电平时,SDA由低电平向高电平跳变,结束传送数据。
响应信号 ACK:
接收器在接收到8位数据后,在第9个时钟周期,拉低 SDA 电平
注意:在第9个时钟周期,发送器保持SDA为高,如果有ACK,那么第9个时钟周期SDA为低电平,如果没有为高电平,发送器根据电平高低分辨是否有ACK信号。
如果使能了IIC中断,发送完8bit数据后,主机自动进入中断处理函数,此时SCL被发送器拉低,让接收器被迫等待。恢复传输只需要清除中断挂起。
2、 s3c2440 读写流程
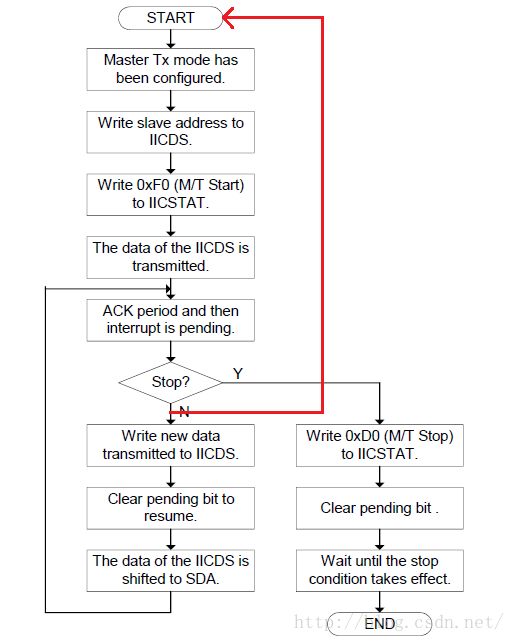
2、写入从机地址到 IICDS[7-1],此时IICDS[7-1]位表示从机地址,第0位不关心。如 AT24C08 为 0xA0(最低位写0了,发送到数据线上的7位地址的后边以为才表示收发,这里虽然写0但并不是根据这里的0来真正发送的)。
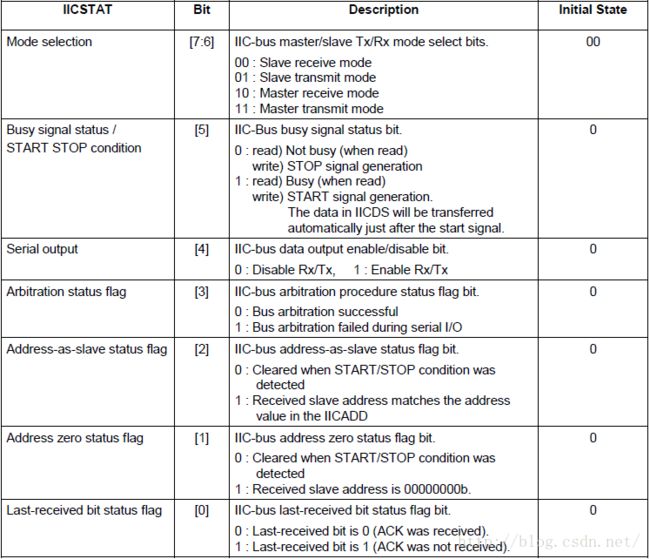
3、写 0xF0(写) 或 0xB0(读)到 IICSTAT 寄存器, 高两位表示 传输模式前边设置过了,设置IICSTT[5-4] 为 11,使能传输,发送S信号。
4、IIC控制器自动将第2步中设置的 IICDS[7-1] 再根据 传输模式 补充 IICDS[0]位,发送出去。
5、进入第9个时钟周期,此时,从机决定是否发出ACK信号,主机进入中断,判断是否收到ACK信号,以及是否继续传输。
继续发送:
1、将数据写入 IICDS
2、清除中断挂起,SCL时钟恢复,IICDS的数据被自动发送到 SDA 线上,回到第5步。
停止发送:
1、写 0xD0(写) 和 0x90(读) 到 IICATAT ,IICATAT[7-6]还是表示的传输模式,IICATAT[5-4] == 0 1,发送停止信号
2、清除中断挂起,SCL时钟恢复,发出停止信号
3、延时,等待停止信号发出
3、 AT24C08 读写分析
1、写过程

2、读过程

附上一份简单的裸机程序,仅供参考:基于MINI2440
#include
#include "s3c2440.h"
void Delay(int time);
#define WRDATA (1)
#define RDDATA (2)
typedef struct tI2C {
unsigned char *pData; /* 数据缓冲区 */
volatile int DataCount; /* 等待传输的数据长度 */
volatile int Status; /* 状态 */
volatile int Mode; /* 模式:读/写 */
volatile int Pt; /* pData中待传输数据的位置 */
}tS3C24xx_I2C, *ptS3C24xx_I2C;
static tS3C24xx_I2C g_tS3C24xx_I2C;
/*
* I2C初始化
*/
void i2c_init(void)
{
GPEUP |= 0xc000; // 禁止内部上拉
/*
* AT24C08 两根线 I2CSCL I2CSDA 与 2440芯片相连
* 配置2440 GPECON GPE15 GPE14引脚为I2C功能
*/
GPECON |= 0xa0000000; // 选择引脚功能:GPE15:IICSDA, GPE14:IICSCL
/* 开INT_IIC中断 */
//INTMSK &= ~(BIT_IIC);
/* bit[7] = 1, 使能ACK
* bit[6] = 0, IICCLK = PCLK/16
* bit[5] = 1, 使能中断
* bit[3:0] = 0xf, Tx clock = IICCLK/16
* PCLK = 50MHz, IICCLK = 3.125MHz, Tx Clock = 0.195MHz
*/
IICCON = (1<<7) | (0<<6) | (1<<5) | (0xf); // 0xaf
//IICADD = 0x10; // S3C24xx slave address = [7:1]
IICSTAT = 0x10; // I2C串行输出使能(Rx/Tx)
}
void I_Write(unsigned int slvaddr, unsigned char addr, unsigned char data)
{
unsigned int ack;
// 写从地址
IICSTAT |= 0x1<<6;//主机写模式
IICSTAT |= 0x1<<7;
IICDS = slvaddr;//0xa0; //write slave address to IICDS
IICCON&=~0x10; //clear pending bit
IICSTAT = 0xf0; //(M/T start)
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
// 写寄存器地址
IICDS = addr;
IICCON&=~0x10; //clear pending bit
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
// 写数据
IICDS = data;
IICCON&=~0x10; //clear pending bit
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
// 发出停止信号
IICSTAT = 0xD0; //write (M/T stop to IICSTAT)
IICCON&=~0x10; //clear pending bit
while((IICSTAT & 1<<5) == 1);
}
unsigned char I_Read(unsigned int slvaddr, unsigned char addr)
{
unsigned char data = 1;
int ack;
// 写从地址
IICSTAT |= 0x1<<6;//主机写模式
IICSTAT |= 0x1<<7;
slvaddr = 0xA0;
IICDS = slvaddr;//0xa0; //write slave address to IICDS
IICCON&=~0x10; //clear pending bit
IICSTAT = 0xf0; //(M/T start)
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
// 写寄存器地址
IICDS = addr;
IICCON&=~0x10; //clear pending bit
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
// 写从地址(读模式)
slvaddr = 0xA1;
IICSTAT &= ~(0x1<<6);//主机接受模式
IICSTAT |= 0x1<<7;
IICDS = slvaddr;
IICCON&=~0x10; //clear pending bit
IICSTAT = 0xb0; //(M/R Start)
while((IICCON & 1<<4) == 0);//udelay(10);//uart_SendByte('o');//ack period and then interrupt is pending::
// 读数据
data = IICDS;
//IICCON&=~0x10; //clear pending bit
IICCON = 0x2f; //清挂起状态,并设置无应答
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
data = IICDS;
//IICCON&=~0x10; //clear pending bit
IICCON = 0x2f; //清挂起状态,并设置无应答
while((IICCON & 1<<4) == 0);//udelay(10);//ack period and then interrupt is pending
IICSTAT = 0x90;
IICCON = 0xaf;
//IICCON &= ~0x10; //clear pending bit
while((IICSTAT & 1<<5) == 1);
return data;
}
4、adapter驱动程序
这里,我们主要分析驱动里的发送核心算法,至于注册中断,IO内存映射,设置寄存器不在讨论。
static int xxx_i2c_xfer(struct i2c_adapter *adpap, struct i2c_msg *msg,int num)
这个算法函数的作用就是将上层封装好的一些i2c_msg 进行解析,将数据写入寄存器,发送出去。在设备驱动层,我们使用了类似i2c_smbus_write_byte 等函数,类似的函数有很多,它们的作用就是封装i2c_msg 结构(比如读和写的 msg 肯定不一样,读一个字节和读多个字节也不一样),然后调用 i2c_smbus_xfer_emulated->i2c_transfer,最终调用到我们的xxx_i2c_xfer函数进行传输。通过分析i2c_smbus_xfer_emulated函数,我们可以了解i2c_msg是如何封装的。下面,我们简单分析一下,知道最上层想干什么,我们才能知道实现哪些底层的功能不是。
struct i2c_msg {
__u16 addr; //从机地址
__u16 flags;
__u16 len; // buf 里 有多少个字节
__u8 *buf; // 本 msg 含有的数据,可能是1个字节,可有可能是多个字节
}; 此函数,省略了很多内容,举例分析而已~,细节请看源码
static s32 i2c_smbus_xfer_emulated(struct i2c_adapter * adapter, u16 addr,
unsigned short flags,
char read_write, u8 command, int size,
union i2c_smbus_data * data)
{
unsigned char msgbuf0[I2C_SMBUS_BLOCK_MAX+3];
unsigned char msgbuf1[I2C_SMBUS_BLOCK_MAX+2];
int num = read_write == I2C_SMBUS_READ?2:1; // 写操作两个Msg 读操作一个msg 这和我们前面分析AT24c08是一致的
struct i2c_msg msg[2] = { { addr, flags, 1, msgbuf0 },
{ addr, flags | I2C_M_RD, 0, msgbuf1 }
};
msgbuf0[0] = command; // 从机地址右移1位得到的,比如AT24C08 为 0x50
switch(size) {
case I2C_SMBUS_BYTE_DATA: // 单字节读写
if (read_write == I2C_SMBUS_READ)
msg[1].len = 1;
/*
* 读:
* msgbuf0[0] = command
* msg[1].len = 1 ,数据会读到 msgbuf0[1] 里
*/
else {
msg[0].len = 2;
msgbuf0[1] = data->byte;
/*
* 写:
* msgbuf0[0] = command
* msgbuf0[1] = data->byte
*/
}
break;
}
status = i2c_transfer(adapter, msg, num);
} 在看adapter程序之前,我们先来简单思考一下,发出S开始信号之后,可能有以下3中情况:
1、当前msg.len == 0 ,如果有ACK直接发出stop信号。这种情况出现在,控制器枚举设备的时候,因为它只发送S信号以及设备地址,不发送数据。
2、根据msg->flags 为 I2C_M_RD 等信息判断读写,msg->flags 最低位为1表示读,最低位为0表示写。
#define I2C_M_TEN0x0010 /* this is a ten bit chip address */
#define I2C_M_RD0x0001 /* read data, from slave to master */
#define I2C_M_NOSTART0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_RECV_LEN0x0400 /* length will be first received byte */
2.1 如果是读
恢复 IIC 传输,开始读就行了,在下一个中断里将寄存器数据取出,如果是最后一个要读取的数据,不能发送ACK(禁用ACK)。
2.2 如果是写
将数据写入 IICDS 寄存器,恢复 IIC 传输。
附上韦东山老师的程序:
看程序之前,看一个大致的流程图,对于理解程序有帮助
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
//#define PRINTK printk
#define PRINTK(...)
enum s3c24xx_i2c_state {
STATE_IDLE,
STATE_START,
STATE_READ,
STATE_WRITE,
STATE_STOP
};
struct s3c2440_i2c_regs {
unsigned int iiccon;
unsigned int iicstat;
unsigned int iicadd;
unsigned int iicds;
unsigned int iiclc;
};
struct s3c2440_i2c_xfer_data {
struct i2c_msg *msgs;
int msn_num;
int cur_msg;
int cur_ptr;
int state;
int err;
wait_queue_head_t wait;
};
static struct s3c2440_i2c_xfer_data s3c2440_i2c_xfer_data;
static struct s3c2440_i2c_regs *s3c2440_i2c_regs;
static void s3c2440_i2c_start(void)
{
s3c2440_i2c_xfer_data.state = STATE_START;
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->addr << 1;
s3c2440_i2c_regs->iicstat = 0xb0; // 主机接收,启动
}
else /* 写 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->addr << 1;
s3c2440_i2c_regs->iicstat = 0xf0; // 主机发送,启动
}
}
static void s3c2440_i2c_stop(int err)
{
s3c2440_i2c_xfer_data.state = STATE_STOP;
s3c2440_i2c_xfer_data.err = err;
PRINTK("STATE_STOP, err = %d\n", err);
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
// 下面两行恢复I2C操作,发出P信号
s3c2440_i2c_regs->iicstat = 0x90;
s3c2440_i2c_regs->iiccon = 0xaf;
ndelay(50); // 等待一段时间以便P信号已经发出
}
else /* 写 */
{
// 下面两行用来恢复I2C操作,发出P信号
s3c2440_i2c_regs->iicstat = 0xd0;
s3c2440_i2c_regs->iiccon = 0xaf;
ndelay(50); // 等待一段时间以便P信号已经发出
}
/* 唤醒 */
wake_up(&s3c2440_i2c_xfer_data.wait);
}
static int s3c2440_i2c_xfer(struct i2c_adapter *adap,
struct i2c_msg *msgs, int num)
{
unsigned long timeout;
/* 把num个msg的I2C数据发送出去/读进来 */
s3c2440_i2c_xfer_data.msgs = msgs;
s3c2440_i2c_xfer_data.msn_num = num;
s3c2440_i2c_xfer_data.cur_msg = 0;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.err = -ENODEV;
s3c2440_i2c_start();
/* 休眠 */
timeout = wait_event_timeout(s3c2440_i2c_xfer_data.wait, (s3c2440_i2c_xfer_data.state == STATE_STOP), HZ * 5);
if (0 == timeout)
{
printk("s3c2440_i2c_xfer time out\n");
return -ETIMEDOUT;
}
else
{
return s3c2440_i2c_xfer_data.err;
}
}
static u32 s3c2440_i2c_func(struct i2c_adapter *adap)
{
return I2C_FUNC_I2C | I2C_FUNC_SMBUS_EMUL | I2C_FUNC_PROTOCOL_MANGLING;
}
static const struct i2c_algorithm s3c2440_i2c_algo = {
// .smbus_xfer = ,
.master_xfer = s3c2440_i2c_xfer,
.functionality = s3c2440_i2c_func,
};
/* 1. 分配/设置i2c_adapter
*/
static struct i2c_adapter s3c2440_i2c_adapter = {
.name = "s3c2440_100ask",
.algo = &s3c2440_i2c_algo,
.owner = THIS_MODULE,
};
static int isLastMsg(void)
{
return (s3c2440_i2c_xfer_data.cur_msg == s3c2440_i2c_xfer_data.msn_num - 1);
}
static int isEndData(void)
{
return (s3c2440_i2c_xfer_data.cur_ptr >= s3c2440_i2c_xfer_data.msgs->len);
}
static int isLastData(void)
{
return (s3c2440_i2c_xfer_data.cur_ptr == s3c2440_i2c_xfer_data.msgs->len - 1);
}
static irqreturn_t s3c2440_i2c_xfer_irq(int irq, void *dev_id)
{
unsigned int iicSt;
iicSt = s3c2440_i2c_regs->iicstat;
if(iicSt & 0x8){ printk("Bus arbitration failed\n\r"); }
switch (s3c2440_i2c_xfer_data.state)
{
case STATE_START : /* 发出S和设备地址后,产生中断 */
{
PRINTK("Start\n");
/* 如果没有ACK, 返回错误 */
if (iicSt & S3C2410_IICSTAT_LASTBIT)
{
s3c2440_i2c_stop(-ENODEV);
break;
}
if (isLastMsg() && isEndData())
{
s3c2440_i2c_stop(0);
break;
}
/* 进入下一个状态 */
if (s3c2440_i2c_xfer_data.msgs->flags & I2C_M_RD) /* 读 */
{
s3c2440_i2c_xfer_data.state = STATE_READ;
goto next_read;
}
else
{
s3c2440_i2c_xfer_data.state = STATE_WRITE;
}
}
case STATE_WRITE:
{
PRINTK("STATE_WRITE\n");
/* 如果没有ACK, 返回错误 */
if (iicSt & S3C2410_IICSTAT_LASTBIT)
{
s3c2440_i2c_stop(-ENODEV);
break;
}
if (!isEndData()) /* 如果当前msg还有数据要发送 */
{
s3c2440_i2c_regs->iicds = s3c2440_i2c_xfer_data.msgs->buf[s3c2440_i2c_xfer_data.cur_ptr];
s3c2440_i2c_xfer_data.cur_ptr++;
// 将数据写入IICDS后,需要一段时间才能出现在SDA线上
ndelay(50);
s3c2440_i2c_regs->iiccon = 0xaf; // 恢复I2C传输
break;
}
else if (!isLastMsg())
{
/* 开始处理下一个消息 */
s3c2440_i2c_xfer_data.msgs++;
s3c2440_i2c_xfer_data.cur_msg++;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.state = STATE_START;
/* 发出START信号和发出设备地址 */
s3c2440_i2c_start();
break;
}
else
{
/* 是最后一个消息的最后一个数据 */
s3c2440_i2c_stop(0);
break;
}
break;
}
case STATE_READ:
{
PRINTK("STATE_READ\n");
/* 读出数据 */
s3c2440_i2c_xfer_data.msgs->buf[s3c2440_i2c_xfer_data.cur_ptr] = s3c2440_i2c_regs->iicds;
s3c2440_i2c_xfer_data.cur_ptr++;
next_read:
if (!isEndData()) /* 如果数据没读写, 继续发起读操作 */
{
if (isLastData()) /* 如果即将读的数据是最后一个, 不发ack */
{
s3c2440_i2c_regs->iiccon = 0x2f; // 恢复I2C传输,接收到下一数据时无ACK
}
else
{
s3c2440_i2c_regs->iiccon = 0xaf; // 恢复I2C传输,接收到下一数据时发出ACK
}
break;
}
else if (!isLastMsg())
{
/* 开始处理下一个消息 */
s3c2440_i2c_xfer_data.msgs++;
s3c2440_i2c_xfer_data.cur_msg++;
s3c2440_i2c_xfer_data.cur_ptr = 0;
s3c2440_i2c_xfer_data.state = STATE_START;
/* 发出START信号和发出设备地址 */
s3c2440_i2c_start();
break;
}
else
{
/* 是最后一个消息的最后一个数据 */
s3c2440_i2c_stop(0);
break;
}
break;
}
default: break;
}
/* 清中断 */
s3c2440_i2c_regs->iiccon &= ~(S3C2410_IICCON_IRQPEND);
return IRQ_HANDLED;
}
/*
* I2C初始化
*/
static void s3c2440_i2c_init(void)
{
struct clk *clk;
clk = clk_get(NULL, "i2c");
clk_enable(clk);
// 选择引脚功能:GPE15:IICSDA, GPE14:IICSCL
s3c_gpio_cfgpin(S3C2410_GPE(14), S3C2410_GPE14_IICSCL);
s3c_gpio_cfgpin(S3C2410_GPE(15), S3C2410_GPE15_IICSDA);
/* bit[7] = 1, 使能ACK
* bit[6] = 0, IICCLK = PCLK/16
* bit[5] = 1, 使能中断
* bit[3:0] = 0xf, Tx clock = IICCLK/16
* PCLK = 50MHz, IICCLK = 3.125MHz, Tx Clock = 0.195MHz
*/
s3c2440_i2c_regs->iiccon = (1<<7) | (0<<6) | (1<<5) | (0xf); // 0xaf
s3c2440_i2c_regs->iicadd = 0x10; // S3C24xx slave address = [7:1]
s3c2440_i2c_regs->iicstat = 0x10; // I2C串行输出使能(Rx/Tx)
}
static int i2c_bus_s3c2440_init(void)
{
/* 2. 硬件相关的设置 */
s3c2440_i2c_regs = ioremap(0x54000000, sizeof(struct s3c2440_i2c_regs));
s3c2440_i2c_init();
request_irq(IRQ_IIC, s3c2440_i2c_xfer_irq, 0, "s3c2440-i2c", NULL);
init_waitqueue_head(&s3c2440_i2c_xfer_data.wait);
/* 3. 注册i2c_adapter */
i2c_add_adapter(&s3c2440_i2c_adapter);
return 0;
}
static void i2c_bus_s3c2440_exit(void)
{
i2c_del_adapter(&s3c2440_i2c_adapter);
free_irq(IRQ_IIC, NULL);
iounmap(s3c2440_i2c_regs);
}
module_init(i2c_bus_s3c2440_init);
module_exit(i2c_bus_s3c2440_exit);
MODULE_LICENSE("GPL");