STM32存储左右互搏 I2C总线读写EEPROM ZD24C1MA
STM32存储左右互搏 I2C总线读写EEPROM ZD24C1MA
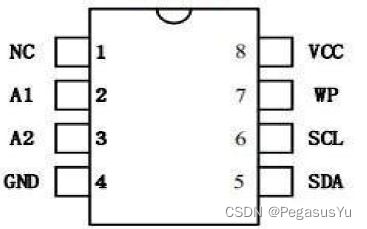
在较低容量存储领域,EEPROM是常用的存储介质,不同容量的EEPROM的地址对应位数不同,在发送字节的格式上有所区别。EEPROM是非快速访问存储,因为EEPROM按页进行组织,在连续操作模式,当跨页时访问地址不是跳到下一页到开始,而是跳到当前页的首地址,因此跨页时要重新指定起始地址。而在控制端发送写操作I2C数据后还需要有等待EEPROM内部操作完成的时间才能进行下一次操作。ZD24C1MA是1M bit / 128K Byte容量的EEPROM,ZD24C1MA的管脚定义为:
这里介绍STM32访问1Mbit EEPROM ZD24C1MA的例程。采用STM32CUBEIDE开发平台,以STM32F401CCU6芯片为例,通过STM32 I2C硬件电路实现读写操作,通过UART串口进行控制。
STM32工程配置
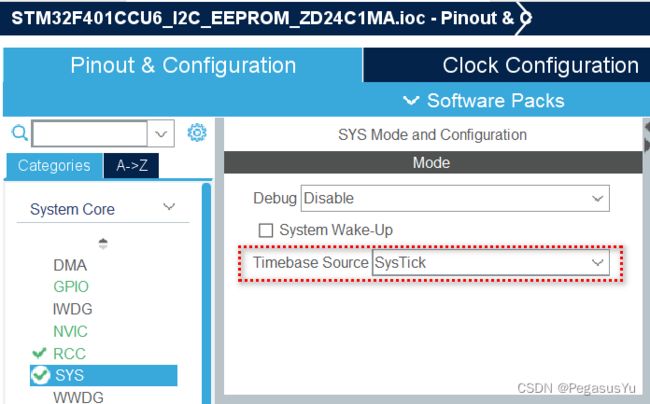
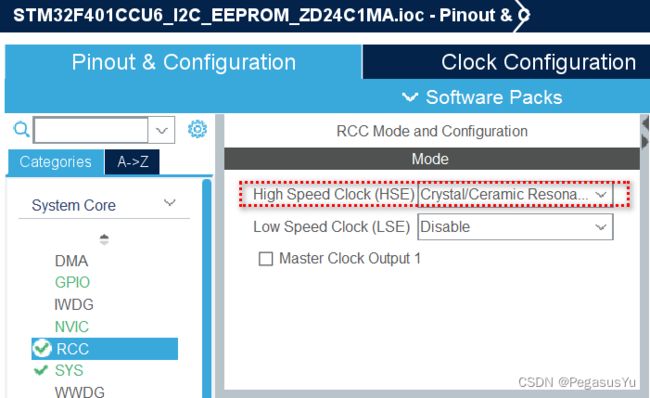
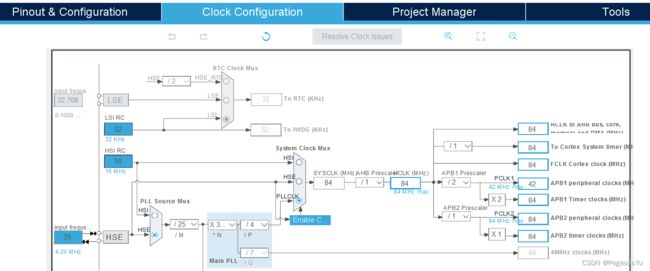
首先建立基本工程并设置时钟:
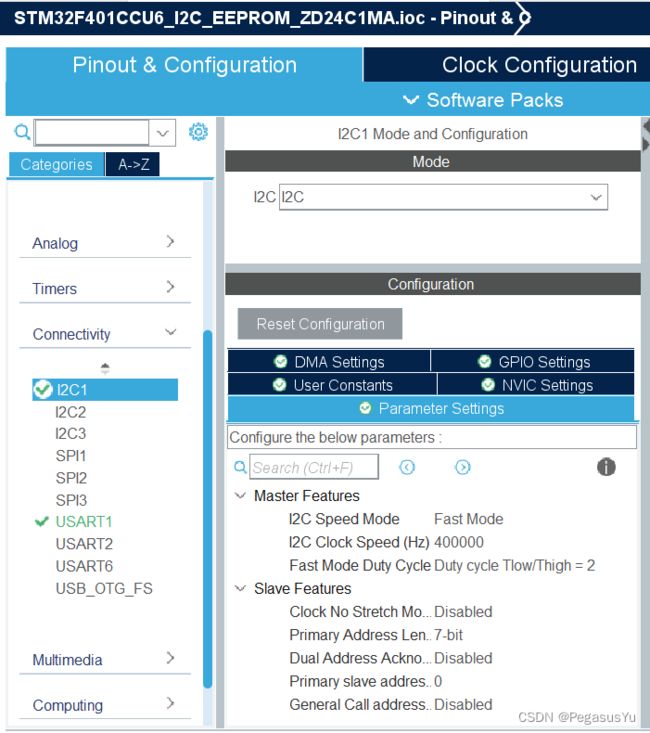
配置硬件I2C接口:

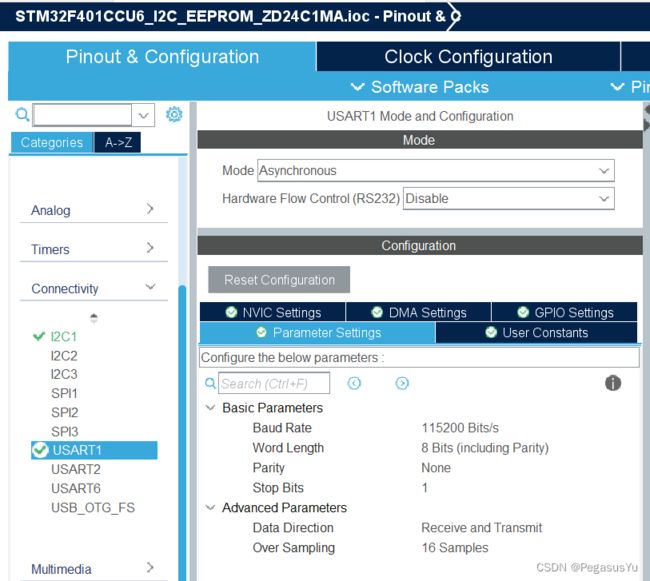
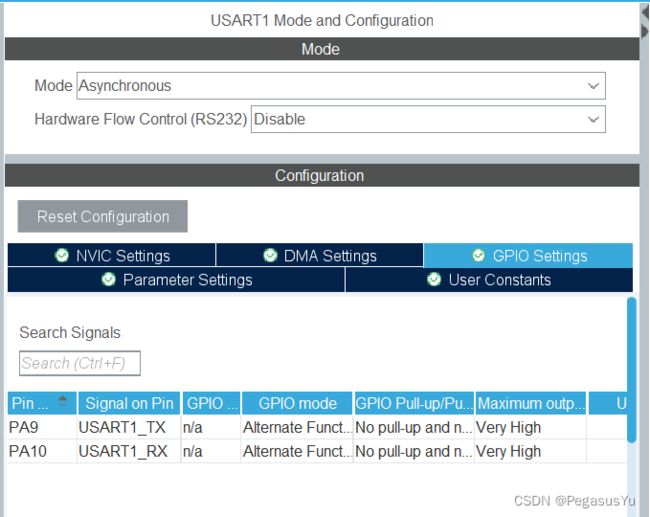
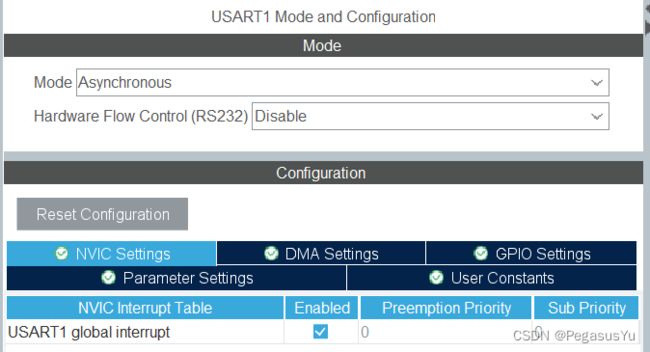
配置UART1作为通讯串口:
保存并生成初始工程代码:

STM32工程代码
这里的测试逻辑比较简单:
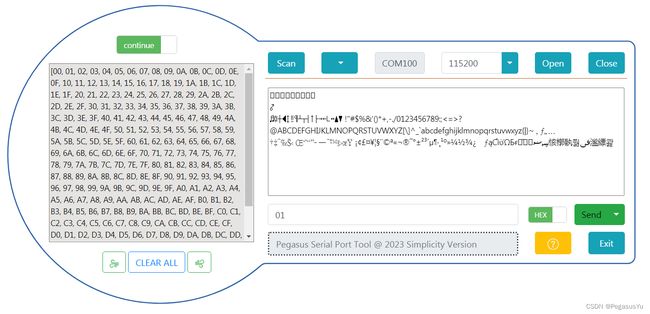
当串口收到指令0x01时向EEPROM 地址0写入预设的256个字节0x00~0xFF(不跨页),然后读出并通过串口打印出
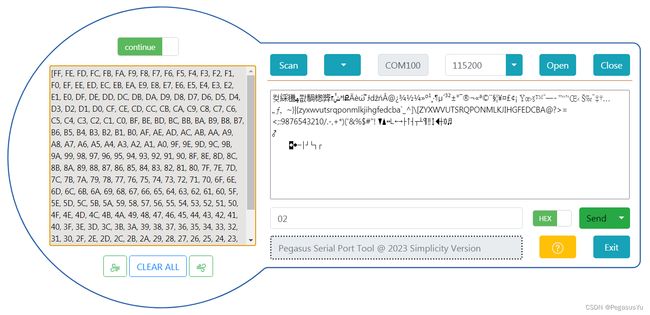
当串口收到指令0x02时向EEPROM 地址600写入预设的256个字节0xFF~0x00(跨页),然后读出并通过串口打印出
ZD24C1MA的设备默认访问地址为0xA0, ZD24C1MA的存储单元地址访问略为特殊,17位地址分为两部分,最高位的1位放置于I2C设备默认访问地址的第1位,I2C设备默认访问地址第0位仍然为读写控制位,由于采用硬件I2C控制,库函数自行通过识别调用的是发送还是接收函数对第0位进行发送前设置,因此,不管是调用库函数的I2C写操作还是读操作,提供的地址相同。17位地址的低16位通过在发送设备地址后的作为跟随的第一,二个字节发送。
建立ZD24C1MA.h库头文件
#ifndef INC_ZD24C1MA_H_
#define INC_ZD24C1MA_H_
#include "main.h"
void PY_Delay_us_t(uint32_t Delay);
void ZD24C1MA_Read(uint32_t addr, uint8_t * data, uint32_t len);
void ZD24C1MA_Write(uint32_t addr, uint8_t * data, uint32_t len);
#endif
建立ZD24C1MA.c库源文件:
#include 完成的main.c文件代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
//Written by Pegasus Yu in 2023
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include STM32范例测试
上述范例的测试效果如下:
指令0x01不跨页写读:
指令0x02跨页写读:
STM32例程下载
STM32F401CCU6 I2C总线读写EEPROM ZD24C1MA例程
–End–