二分图算法(染色法 匈牙利算法)
目录
- 二分图算法总览
- 二分图的概念
-
- 1.二分图的定义
- 2.二分图的特点
- 3.二分图的应用
- 染色法(判断二分图)
-
- 算法步骤
- 算法运用
-
- 染色法判定二分图
- 匈牙利算法(计算二分图的最大匹配)
-
- 二分图的匹配
- 算法步骤
- 算法应用
-
- 二分图的最大匹配
二分图算法总览

二分图的概念
1.二分图的定义
一个图 G = ( V , E ) G=(V,E) G=(V,E) 被称为二分图(Bipartite Graph),当且仅当顶点集 V V V 可以分割成两个互不相交的子集 U U U 和 W W W,使得 E E E 中的每一条边都连接一个 U U U 中的顶点和一个 W W W 中的顶点。
换句话说,二分图就是图中的顶点可以分成两类,每条边都只连接这两类顶点中的一个。
例如:
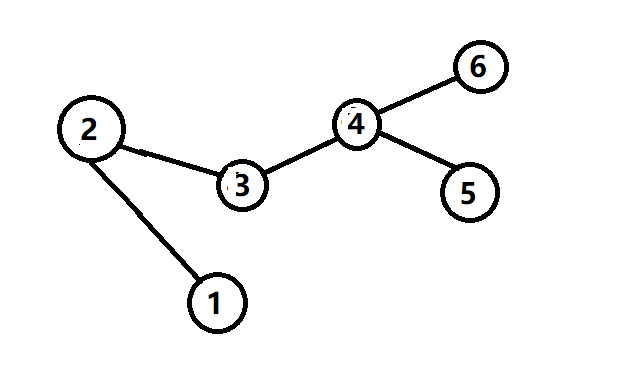

这就是一个明显的二分图,集合A与B中的点互不相连。
2.二分图的特点
- 图 G G G 中的顶点可以分成两个互不相交的子集 U U U 和 W W W, V = U ∪ W V=U∪W V=U∪W。
- 对于任意一条边 ( u , w ) (u,w) (u,w),必有 u ∈ U u∈U u∈U, w ∈ W w∈W w∈W。也就是说,每条边都连接 U U U 和 W W W 中的顶点。
- 不存在属于同一顶点集的两点之间有边相连。 U U U 中的顶点只连接 W W W 中的顶点, W W W 中的顶点只连接 U U U 中的顶点。
- 一个图是二分图,当且仅当它不包含奇数长度的环。
注意:
- 二分图当且仅当图中没有奇数环
- 当图中没有奇数环一定是二分图
- 任何无回路的图均是二分图
- 二分图不一定是连通图

3.二分图的应用
二分图的一些常见应用场景包括:
-
匹配问题
二分图可以用于描述匹配关系。例如,在求解Stable Marriage问题时,男生集合和女生集合构成二分图的两个顶点集,边表示男生和女生之间的偏好。求解这个二分图的最大匹配,就可以得到一个稳定的匹配方案。 -
网络流问题
很多网络流问题可以建模为二分图。例如在网络最大流问题中,源点集和汇点集分别作为二分图的两个顶点集,边和边上的流量构成二分图。求解这个二分图的最大流就等价于求原网络的最大流。 -
图的着色问题
如果将每个颜色看成一个顶点集,图的节点看成另一个顶点集,则图的着色问题可以转换为在对应的二分图中求最大匹配。 -
关系建模
二分图可以建模表达两个不同类型实体集合之间的关系。例如,学生-课程的关系可以用学生集合和课程集合构成的二分图来表示。 -
调度问题
将任务看成一个顶点集,处理器资源看成另一个顶点集,二分图的边表示任务和处理器之间的关系,求解二分图的最大匹配可以用于调度资源。
染色法(判断二分图)
染色法是判断图是否为二分图的一种算法。
基本思想是:
①为图 G G G 中的每个顶点赋予红色或蓝色这两种不同的颜色。
②如果存在一条边的两个端点颜色相同,则该图不是二分图。
③如果所有的边两端点颜色均不同,则该图是二分图。
算法步骤
-
创建一个标记数组 c o l o r [ ] color[ ] color[],将所有顶点标记为未染色,初始化为 0 0 0。
-
遍历所有顶点,对于每个未染色的顶点 v v v:
(1) 使用红色或蓝色对其染色, c o l o r [ v ] = 1 color[v] = 1 color[v]=1 或 2 2 2。
(2) 将与顶点 v v v 相连的所有顶点染成不同颜色。 -
检查每条边的两个端点颜色是否不同:
(1) 若存在一条边其两个端点颜色相同,则返回false,该图不是二分图。
(2) 若所有边两端点颜色均不同,则返回true,该图是二分图。
分析:
- 时间复杂度 O ( n + m ) O(n + m) O(n+m),需要遍历所有顶点和边。
- 空间复杂度 O ( n ) O(n) O(n),需要颜色标记数组。
- 可以在线性时间内判断二分图,效率较高。
算法运用
染色法判定二分图
题目描述:
给定一个 n n n 个点 m m m 条边的无向图,图中可能存在重边和自环。
请你判断这个图是否是二分图。
输入格式:
第一行包含两个整数 n n n 和 m m m。
接下来 m m m 行,每行包含两个整数 u u u 和 v v v,表示点 u u u 和点 v v v 之间存在一条边。
输出格式:
如果给定图是二分图,则输出 Yes,否则输出 No。
数据范围:
1 ≤ n , m ≤ 1 0 5 1≤n,m≤10^5 1≤n,m≤105
输入样例:
4 4
1 3
1 4
2 3
2 4
输出样例:
Yes
代码实现:
这里采用DFS实现,其实也可以用BFS实现。
#includetip:
妙用 3 − c 3 - c 3−c 来表示与当前顶点相反的颜色。
扩展问题:
关押罪犯
匈牙利算法(计算二分图的最大匹配)
匈牙利算法(Hungarian algorithm)是用于解决二分图最大匹配问题。其基本思想是通过寻找增广路径来不断增加匹配的边数,直到无法找到新的增广路径为止。
二分图的匹配
-
二分图的匹配:给定一个二分图 G G G,在 G G G 的一个子图 M M M 中, M M M 的边集 E E E 中的任意两条边都不依附于同一个顶点,则称 M M M 是一个匹配。
-
二分图的最大匹配:所有匹配中包含边数最多的一组匹配被称为二分图的最大匹配,其边数即为最大匹配数。
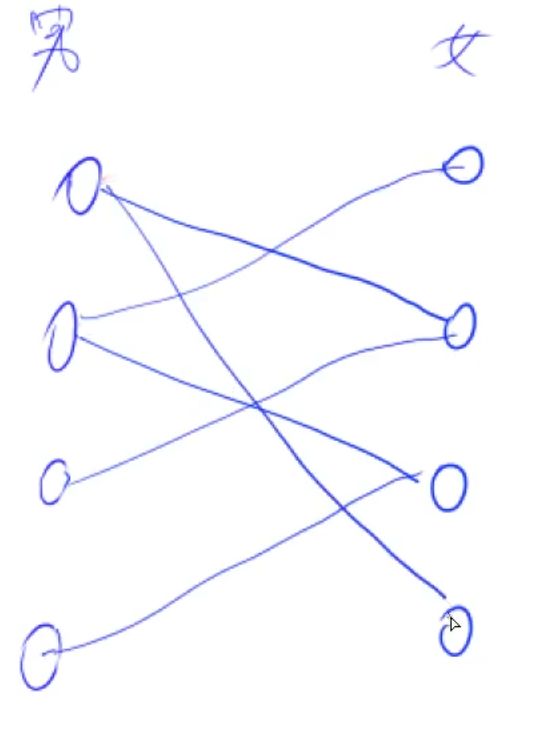
匹配前:
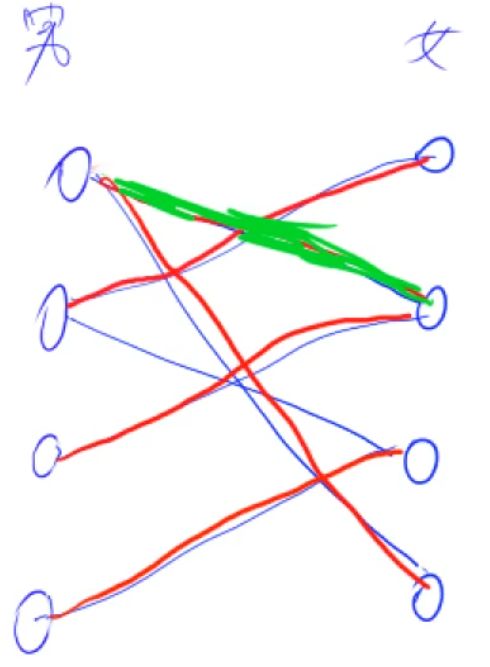
匹配后:
算法步骤
下面是匈牙利算法的具体步骤:
-
初始化:将所有顶点的匹配状态置为未匹配( m a t c h match match 数组初始化为 0 0 0)。
-
遍历左侧顶点:对于二分图的每个左侧顶点i,开始寻找增广路径。
- 将当前左侧顶点i的状态数组 s t st st 初始化为 f a l s e false false,用于标记增广路径中的顶点是否已经被访问。
- 对当前左侧顶点 i i i,尝试在其邻接表中寻找一个未匹配的右侧顶点 j j j(如果存在),或者找到一个能够与右侧顶点 j j j 存在增广路径的未匹配顶点。
- 若找到这样的顶点 j j j,则将右侧顶点 j j j 与左侧顶点i进行匹配(即将 m a t c h [ j ] match[j] match[j] 设置为 i i i),表示找到一条增广路径。
-
增加匹配数:在找到一条增广路径后,将匹配数 r e s res res 加 1 1 1。
-
重复步骤 2 2 2 和步骤 3 3 3:重复执行上述步骤,直到无法找到新的增广路径为止。
-
输出结果:最终匹配的边数 r e s res res 即为二分图的最大匹配数。
算法应用
二分图的最大匹配
题目描述:
给定一个二分图,其中左半部包含 n 1 n_1 n1 个点(编号 1 ∼ n 1 1∼n_1 1∼n1),右半部包含 n 2 n_2 n2 个点(编号 1 ∼ n 2 1∼n_2 1∼n2),二分图共包含 m m m 条边。
数据保证任意一条边的两个端点都不可能在同一部分中。
请你求出二分图的最大匹配数。
输入格式:
第一行包含三个整数 n 1 、 n 2 和 m n_1、 n_2 和 m n1、n2和m。
接下来 m m m 行,每行包含两个整数 u u u 和 v v v,表示左半部点集中的点 u u u 和右半部点集中的点 v v v 之间存在一条边。
输出格式:
输出一个整数,表示二分图的最大匹配数。
数据范围:
1 ≤ n 1 , n 2 ≤ 500 1≤n_1,n_2≤500 1≤n1,n2≤500
1 ≤ u ≤ n 1 1≤u≤n_1 1≤u≤n1
1 ≤ v ≤ n 2 1≤v≤n_2 1≤v≤n2
1 ≤ m ≤ 1 0 5 1≤m≤10^5 1≤m≤105
输入样例:
2 2 4
1 1
1 2
2 1
2 2
输出样例:
2
代码实现:
#define _CRT_SECURE_NO_WARNINGS
#include扩展问题:
棋盘覆盖