opencv基础41-图像梯度-sobel算子详解cv2.Sobel()(边缘检测基础)
图像梯度是用于描述图像变化率的概念。在图像处理中,梯度指的是图像中每个像素的灰度值变化速率或方向。它常用于边缘检测和图像特征提取。
一维图像的梯度表示为函数 f(x) 的导数,而在二维图像中,梯度是一个向量,包含两个分量:水平方向和垂直方向的灰度变化率。这两个分量的大小和方向可以用来确定图像中的边缘和纹理信息。
在图像处理中,常用的算子如Sobel、Prewitt和Scharr等可以用于计算图像的梯度。梯度计算对于计算机视觉任务和图像处理中的特征提取非常有用。
图像梯度计算需要求导数,但是图像梯度一般通过计算像素值的差来得到梯度的近似值(近似导数值)。
例如,图 9-1 中的左右两幅图分别描述了图像的水平边界和垂直边界。
针对左图,通过垂直方向的线条 A 和线条 B 的位置,可以计算图像水平方向的边界:
-
对于线条 A 和线条 B,其右侧像素值与左侧像素值的差值不为零,因此是边界。
-
对于其余列,其右侧像素值与左侧像素值的差值均为零,因此不是边界。
针对右图,通过水平方向的线条 A 和线条 B 的位置,可以计算图像垂直方向的边界:
- 对于线条 A 和线条 B,其下侧像素值与上侧像素值的差值不为零,因此是边界。
- 对于其余行,其下侧像素值与上侧像素值的差值均为零,因此不是边界。

将上述运算关系进一步优化,可以得到更复杂的边缘信息。
Sobel 理论基础
Sobel 算子是一种离散的微分算子,该算子结合了高斯平滑和微分求导运算。该算子利用局部差分寻找边缘,计算所得的是一个梯度的近似值。
Sobel 算子如图 9-2 所示。
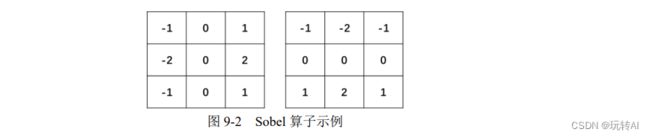
需要说明的是,滤波器通常是指由一幅图像根据像素点(x, y)临近的区域计算得到另外一幅新图像的算法。因此,滤波器是由邻域及预定义的操作构成的。滤波器规定了滤波时所采用的形状以及该区域内像素值的组成规律。滤波器也被称为“掩模”、“核”、“模板”、“窗口”、“算子”等。一般信号领域将其称为“滤波器”,数学领域将其称为“核”。
文中出现的滤波器多数为“线性滤波器”,也就是说,滤波的目标像素点的值等于原始像素值及其周围像素值的加权和。这种基于线性核的滤波,就是我们所熟悉的卷积。在文中,为了方便说明,直接使用“算子”来表示各种算子所使用的滤波器。例如,文中所说的“Sobel 算子”通常是指 Sobel滤波器。
假定有原始图像 src,下面对 Sobel 算子的计算进行讨论。
1. 计算水平方向偏导数的近似值
将 Sobel 算子与原始图像 src 进行卷积计算,可以计算水平方向上的像素值变化情况。
例如,当 Sobel 算子的大小为 3×3 时,水平方向偏导数 Gx的计算方式为:

上式中,src 是原始图像,假设其中有 9 个像素点,如图 9-3 所示。

如果要计算像素点 P5 的水平方向偏导数 P5x,则需要利用 Sobel 算子及 P5 邻域点,所使用的公式为:
P5x = (P3-P1) + 2·(P6-P4) + (P9-P7)
即用像素点 P5 右侧像素点的像素值减去其左侧像素点的像素值。其中,中间像素点(P4 和 P6)距离像素点 P5 较近,其像素值差值的权重为 2;其余差值的权重为 1。
然后将这三个差值相加得到一个新的值,并将这个新的值赋给P5,即得到P5的像素值。
2. 计算垂直方向偏导数的近似值
将 Sobel 算子与原始图像 src 进行卷积计算,可以计算垂直方向上的变化情况。例如,当Sobel 算子的大小为 3×3 时,垂直方向偏导数 Gy的计算方式为:

上式中,src 是原始图像,假设其中有 9 个像素点,如图 9-4 所示。

如果要计算像素点 P5 的垂直方向偏导数 P5y,则需要利用 Sobel 算子及 P5 邻域点,所使用的公式为:
P5y = (P7-P1) + 2·(P8-P2) + (P9-P3)
式中,使用像素点 P5 下一行像素点的像素值减去上一行像素点的像素值。其中,中间像素点(P2 和 P8)距离像素点 P5 较近,其像素值差值的权重为 2;其余差值的权重为 1。
Sobel 算子及函数使用
在 OpenCV 内,使用函数 cv2.Sobel()实现 Sobel 算子运算,其语法形式为:
dst = cv2.Sobel( src, ddepth, dx, dy[,ksize[, scale[, delta[, borderType]]]] )
式中:
- dst 代表目标图像。
- src 代表原始图像。
- ddepth 代表输出图像的深度。其具体对应关系如表 9-1 所示。

- dx 代表 x 方向上的求导阶数。
- dy 代表 y 方向上的求导阶数。
- ksize 代表 Sobel 核的大小。该值为-1 时,则会使用 Scharr 算子进行运算。
- scale 代表计算导数值时所采用的缩放因子,默认情况下该值是 1,是没有缩放的。
- delta 代表加在目标图像 dst 上的值,该值是可选的,默认为 0。
- borderType 代表边界样式。该参数的具体类型及值如表 9-2 所示。

参数ddepth
在函数 cv2.Sobel()的语法中规定,可以将函数 cv2.Sobel()内 ddepth 参数的值设置为-1,让处理结果与原始图像保持一致。但是,如果直接将参数 ddepth 的值设置为-1,在计算时得到的结果可能是错误的。
在实际操作中,计算梯度值可能会出现负数。如果处理的图像是 8 位图类型,则在 ddepth的参数值为-1 时,意味着指定运算结果也是 8 位图类型,那么所有负数会自动截断为 0,发生信息丢失。为了避免信息丢失,在计算时要先使用更高的数据类型 cv2.CV_64F,再通过取绝对值将其映射为 cv2.CV_8U(8 位图)类型。所以,通常要将函数 cv2.Sobel()内参数 ddepth 的值设置为“cv2.CV_64F”。
下面对参数 ddepth 值的设定做一个简要的说明。
例如,图 9-5 中的原始图像(左图)是一幅二值图像,图中黑色部分的像素值为 0,白色部分的像素值为 1。在计算 A 线条所在位置和 B 线条所在位置的近似偏导数时:
-
针对 A 线条所在列,右侧像素值减去左侧像素值所得近似偏导数的值为-1。
-
针对 B 线条所在列,右侧像素值减去左侧像素值所得近似偏导数的值为 1。
针对上述偏导数结果进行不同方式的处理,可能会得到不同的结果,例如:
-
直接计算。此时,A 线条位置的值为负数,B 线条位置的值为正数。在显示时,由于上述负值不在 8 位图范围内,因此要做额外处理。将 A 线条处的负数偏导数处理为 0,B线条处的正数偏导数保持不变。在这种情况下,显示结果如图 9-5 中间的图所示。
-
计算绝对值。此时,A 线条处的负数偏导数被处理正数,B 线条处的正数偏导数保持不变。在显示时,由于上述值在 8 位图的表示范围内,因此不再对上述值进行处理,此时,
显示结果如图 9-5 中的右图所示。

上述问题在计算垂直方向的近似偏导数时同样存在。例如,图 9-6 中的原始图像(左图)
是一幅二值图像,图中黑色部分的像素值为 0,白色部分的像素值为 1。计算 A 线条所在位置
和 B 线条所在位置的近似偏导数时:
针对 A 线条所在行,下方像素值减去上方像素值所得近似偏导数为-1。
针对 B 线条所在行,下方像素值减去上方像素值所得近似偏导数为 1。
针对上述偏导数结果进行不同方式的处理,可能会得到不同的结果,例如:
- 直接计算。此时,A 线条位置的值为负数,B 线条位置的值为正数。在显示时,上述值不在 8 位图的表示范围内,因此需要进行额外处理。将 A 线条处的负数偏导数处理为 0,
B 线条处的正数偏导数保持不变。此时,显示结果如图 9-6 中间的图所示。 - 计算绝对值。此时,A 线条处的负数偏导数被处理正数,B 线条处的正数偏导数保持不变。在显示时,由于上述值在 8 位图的表示范围内,因此不再对上述值进行处理,此时,
显示结果如图 9-6 中的右图所示。

经过上述分析可知,为了让偏导数正确地显示出来,需要将值为负数的近似偏导数转换为正数。即,要将偏导数取绝对值,以保证偏导数总能正确地显示出来。
例如,图 9-7 描述了如何计算偏导数。

为了得到结果为正数的偏导数,需要对图 9-7 中计算的偏导数取绝对值,如下:
|P5x| = |(P3-P1) + 2·(P6-P4) + (P9-P7)|
|P5y| = |(P7-P1) + 2·(P8-P2) + (P9-P3)|
当然,在需要时,还可以进行如下处理:
P5Sobel = |P5x| + |P5y| = |(P3-P1) +2·(P6-P4) + (P9-P7)| + |(P7-P1) + 2·(P8-P2) + (P9-P3)|
经过以上分析,我们得知:在实际操作中,计算梯度值可能会出现负数。通常处理的图像是 8 位图类型,如果结果也是该类型,那么所有负数会自动截断为 0,发生信息丢失。所以,
为了避免信息丢失,我们在计算时使用更高的数据类型 cv2.CV_64F,再通过取绝对值将其映射为 cv2.CV_8U(8 位图)类型。
OpenCV 中,使用函数 cv2.convertScaleAbs()对参数取绝对值,该函数的语法格式为:
dst = cv2.convertScaleAbs( src [, alpha[, beta]] )
上式中:
- dst 代表处理结果。
- src 代表原始图像。
- alpha 代表调节系数,该值是可选值,默认为 1。
- beta 代表调节亮度值,该值是默认值,默认为 0。
这里,该函数的作用是将原始图像 src 转换为 256 色位图,其可以表示为:
dst=saturate(src*alpha+beta)
式中,saturate()表示计算结果的最大值是饱和值,例如当“src*alpha+beta”的值超过 255 时,其取值为 255。
代码示例:使用函数 cv2.convertScaleAbs()对一个随机数组取绝对值。
import cv2
import numpy as np
img=np.random.randint(-256,256,size=[4,5],dtype=np.int16)
rst=cv2.convertScaleAbs(img)
print("img=\n",img)
print("rst=\n",rst)
运行结果:
img=
[[ -26 -176 -21 -125 70]
[ 54 156 -76 -8 -117]
[ 226 -19 -21 114 132]
[ 126 120 72 -256 137]]
rst=
[[ 26 176 21 125 70]
[ 54 156 76 8 117]
[226 19 21 114 132]
[126 120 72 255 137]]
从结果中看出原图中的负数都转变成了正数,并且转正大于255 的会改成255
cv2.Sobel() 方向参数 dx,dy
在函数 cv2.Sobel()中,参数 dx 表示 x 轴方向的求导阶数,参数 dy 表示 y 轴方向的求导阶数。参数 dx 和 dy 通常的值为 0 或者 1,最大值为 2。如果是 0,表示在该方向上没有求导。当然,参数 dx 和参数 dy 的值不能同时为 0。
参数 dx 和参数 dy 可以有多种形式的组合,主要包含:
- 计算 x 方向边缘(梯度):dx=1, dy=0。
- 计算 y 方向边缘(梯度):dx=0, dy=1。
- 参数 dx 与参数 dy 的值均为 1:dx=1, dy=1。
- 计算 x 方向和 y 方向的边缘叠加:通过组合方式实现。
下面分别对上述情况进行简要说明。
1. 计算x方向边缘(梯度):dx=1,dy=0
如果想只计算 x 方向(水平方向)的边缘,需要将函数 cv2.Sobel()的参数 dx 和 dy 的值设置为“dx=1, dy=0”。当然,也可以设置为“dx=2, dy=0”。此时,会仅仅获取水平方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 0 )
使用该语句获取边缘图的示例如图 9-8 所示,其中左图为原始图像,右图为获取的边缘图。

2. 计算y方向边缘(梯度):dx=0,dy=1
如果想只计算 y 方向(垂直方向)的边缘,需要将函数 cv2.Sobel()的参数 dx 和 dy 的值设置为“dx=0, dy=1”。当然,也可以设置为“dx=0, dy=2”。此时,会仅仅获取垂直方向的边缘信
息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 0 , 1 )
使用该语句获取边缘图的示例如图 9-9 所示,其中左图为原始图像,右图为获取的边缘图。

3. 参数dx与参数dy的值均为 1:dx=1,dy=1
可以将函数 cv2.Sobel()的参数 dx 和 dy 的值设置为“dx=1, dy=1”,也可以设置为“dx=2,dy=2”,或者两个参数都不为零的其他情况。此时,会获取两个方向的边缘信息,此时的语法格式为:
dst = cv2.Sobel( src , ddepth , 1 , 1 )
使用该语句获取边缘图的示例如图 9-10 所示,其中左图为原始图像,右图为获取的边缘图,仔细观察可以看到图中仅有若干个微小白点,每个点的大小为一个像素。

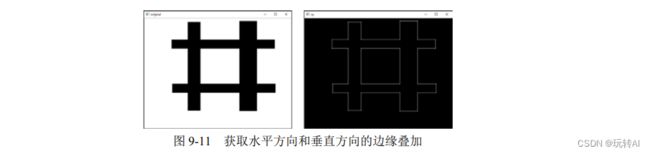
4. 计算x方向和y方向的边缘叠加
如果想获取 x 方向和 y 方向的边缘叠加,需要分别获取水平方向、垂直方向两个方向的边缘图,然后将二者相加。此时的语法格式为:
dx= cv2.Sobel( src , ddepth , 1 , 0 )
dy= cv2.Sobel( src , ddepth , 0 , 1 )
dst=cv2.addWeighted( src1 , alpha , src2 , beta , gamma )
使用上述语句获取边缘图的示意图如图 9-11 所示,其中左图为原始图像,右图为获取的边缘图
代码示例:使用函数 cv2.Sobel()获取图像水平方向的边缘信息。
原图:

import cv2
o = cv2.imread('sobel4.bmp',cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o,-1,1,0)
cv2.imshow("original",o)
cv2.imshow("x",Sobelx)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:

从程序可以看出,当参数 ddepth 的值为-1 时,只得到了图中黑色框的右边界。这是因为,左边界在运算时得到了负值,其在显示时被调整为 0,所以没有显示出来。要想获取左边界的值(将其显示出来),必须将参数 ddepth 的值设置为更大范围的数据结构类型,并将其映射到8 位图像内。
示例2: 使用函数 cv2.Sobel()获取图像水平方向的完整边缘信息。
代码如下:
import cv2
o = cv2.imread('Sobel4.bmp',cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o,cv2.CV_64F,1,0)
Sobelx = cv2.convertScaleAbs(Sobelx)
cv2.imshow("original",o)
cv2.imshow("x",Sobelx)
cv2.waitKey()
cv2.destroyAllWindows()

示例3: 计算函数 cv2.Sobel()在水平、垂直两个方向叠加的边缘信息。
import cv2
o = cv2.imread('Sobel4.bmp',cv2.IMREAD_GRAYSCALE)
Sobelx = cv2.Sobel(o,cv2.CV_64F,1,0)
Sobely = cv2.Sobel(o,cv2.CV_64F,0,1)
Sobelx = cv2.convertScaleAbs(Sobelx)
Sobely = cv2.convertScaleAbs(Sobely)
Sobelxy = cv2.addWeighted(Sobelx,0.5,Sobely,0.5,0)
cv2.imshow("original",o)
cv2.imshow("xy",Sobelxy)
cv2.waitKey()
cv2.destroyAllWindows()

本例中首先分别计算 x 方向的边缘、y 方向的边缘,接下来使用函数
cv2.addWeighted()对两个方向的边缘进行叠加。在最终的叠加边缘结果中,同时显示两个方向的边缘信息。