W6100-EVB-PICO作为TCP Client 进行数据回环测试(五)
前言
上一章我们用W6100-EVB-PICO开发板通过DNS解析www.baidu.com(百度域名)成功得到其IP地址,那么本章我们将用我们的开发板作为客户端去连接服务器,并做数据回环测试:收到服务器发送的数据,并回传给服务器。
TCP是什么?什么是TCP Client? 能做什么?
TCP (Transmission Control Protocol) 是一种面向连接的、可靠的、基于字节流的传输协议,用于在计算机网络上传输数据。TCP Client是指TCP网络服务的客户端连接,主动向服务器发起连接请求并建立连接,用于实现串口数据和服务器数据的交互,保证数据的可靠交换。TCP Clent通常用于设备与服务器之间的数据交互,是最常用的联网通信方式。
TCP Client的主要作用是建立和管理与TCP服务器之间的连接,实现数据的可靠传输。通过TCP Client,设备可以向服务器发送数据并从服务器接收数据,从而实现设备与服务器之间的数据交互。
在TCP Client中,客户端程序需要指定服务器的IP地址和端口号,并使用TCP协议与服务器建立连接。一旦连接建立成功,客户端程序就可以通过数据流对象 (NetworkStream) 与服务器进行数据交互。
因此,TCP Client可以帮助设备实现与服务器之间的可靠数据交换,是设备联网通信的重要方式之一。在工业自动化、物联网、智能家居等应用中,TCP Client被广泛使用。
连接方式
使开发板和我们的电脑处于同一网段:
- 开发板(设备)通过交叉线直连主机(PC)
- 开发板和主机都接在路由器LAN口
测试工具
- 网络调试工具(任意)
- wireshark抓包工具
回环测试
1. 相关代码
如下所示,我们可以看到应用实例里面loopback_tcpc的具体实现,我们需要传入五个参数:socket端口号、收发缓存、目的IP地址、目的端口号和回环模式;函数里面用一个Switch状态机,对socket端口状态轮询并进行相应的处理,处于连接状态就判断是否收到数据,如果有就获取数据大小,并做回传处理,回传失败就关闭端口;处于关闭状态就跑tcp协议并打开端口;处于初始化状态就连接服务器;处于等待关闭状态就断开连接。
值得一提的是W6100这款以太网芯片支持IPv6,因此在回环模式上有着不同选择,相应地处理上也会根据模式分别进行处理,这里选择IPv4模式进行回环测试。
int32_t loopback_tcpc(uint8_t sn, uint8_t* buf, uint8_t* destip, uint16_t destport, uint8_t loopback_mode)
{
int32_t ret; // return value for SOCK_ERRORs
datasize_t sentsize=0;
uint8_t status,inter,addr_len;
datasize_t received_size;
uint8_t tmp = 0;
uint8_t arg_tmp8;
wiz_IPAddress destinfo;
// Socket Status Transitions
// Check the W6100 Socket n status register (Sn_SR, The 'Sn_SR' controlled by Sn_CR command or Packet send/recv status)
getsockopt(sn,SO_STATUS,&status);
switch(status)
{
case SOCK_ESTABLISHED :
ctlsocket(sn,CS_GET_INTERRUPT,&inter);
if(inter & Sn_IR_CON) // Socket n interrupt register mask; TCP CON interrupt = connection with peer is successful
{
#ifdef _LOOPBACK_DEBUG_
printf("%d:Connected to - %d.%d.%d.%d : %d\r\n",sn, destip[0], destip[1], destip[2], destip[3], destport);
#endif
arg_tmp8 = Sn_IR_CON;
ctlsocket(sn,CS_CLR_INTERRUPT,&arg_tmp8);// this interrupt should be write the bit cleared to '1'
}
//
// Data Transaction Parts; Handle the [data receive and send] process
//
getsockopt(sn, SO_RECVBUF, &received_size);
if(received_size > 0) // Sn_RX_RSR: Socket n Received Size Register, Receiving data length
{
if(received_size > DATA_BUF_SIZE) received_size = DATA_BUF_SIZE; // DATA_BUF_SIZE means user defined buffer size (array)
ret = recv(sn, buf, received_size); // Data Receive process (H/W Rx socket buffer -> User's buffer)
if(ret <= 0) return ret; // If the received data length <= 0, receive failed and process end
received_size = (uint16_t) ret;
sentsize = 0;
// Data sentsize control
while(received_size != sentsize)
{
ret = send(sn, buf+sentsize, received_size-sentsize); // Data send process (User's buffer -> Destination through H/W Tx socket buffer)
if(ret < 0) // Send Error occurred (sent data length < 0)
{
close(sn); // socket close
return ret;
}
sentsize += ret; // Don't care SOCKERR_BUSY, because it is zero.
}
}
//
break;
case SOCK_CLOSE_WAIT :
#ifdef _LOOPBACK_DEBUG_
printf("%d:CloseWait\r\n",sn);
#endif
getsockopt(sn, SO_RECVBUF, &received_size);
if((received_size = getSn_RX_RSR(sn)) > 0) // Sn_RX_RSR: Socket n Received Size Register, Receiving data length
{
if(received_size > DATA_BUF_SIZE) received_size = DATA_BUF_SIZE; // DATA_BUF_SIZE means user defined buffer size (array)
ret = recv(sn, buf, received_size); // Data Receive process (H/W Rx socket buffer -> User's buffer)
if(ret <= 0) return ret; // If the received data length <= 0, receive failed and process end
received_size = (uint16_t) ret;
sentsize = 0;
// Data sentsize control
while(received_size != sentsize)
{
ret = send(sn, buf+sentsize, received_size-sentsize); // Data send process (User's buffer -> Destination through H/W Tx socket buffer)
if(ret < 0) // Send Error occurred (sent data length < 0)
{
close(sn); // socket close
return ret;
}
sentsize += ret; // Don't care SOCKERR_BUSY, because it is zero.
}
}
if((ret=disconnect(sn)) != SOCK_OK) return ret;
#ifdef _LOOPBACK_DEBUG_
printf("%d:Socket Closed\r\n", sn);
#endif
break;
case SOCK_INIT :
#ifdef _LOOPBACK_DEBUG_
if(loopback_mode == AS_IPV4)
printf("%d:Try to connect to the %d.%d.%d.%d, %d\r\n", sn, destip[0], destip[1], destip[2], destip[3], destport);
else if(loopback_mode == AS_IPV6)
{
printf("%d:Try to connect to the %04X:%04X", sn, ((uint16_t)destip[0] << 8) | ((uint16_t)destip[1]),
((uint16_t)destip[2] << 8) | ((uint16_t)destip[3]));
printf(":%04X:%04X", ((uint16_t)destip[4] << 8) | ((uint16_t)destip[5]),
((uint16_t)destip[6] << 8) | ((uint16_t)destip[7]));
printf(":%04X:%04X", ((uint16_t)destip[8] << 8) | ((uint16_t)destip[9]),
((uint16_t)destip[10] << 8) | ((uint16_t)destip[11]));
printf(":%04X:%04X,", ((uint16_t)destip[12] << 8) | ((uint16_t)destip[13]),
((uint16_t)destip[14] << 8) | ((uint16_t)destip[15]));
printf("%d\r\n", destport);
}
#endif
if(loopback_mode == AS_IPV4)
ret = connect(sn, destip, destport, 4); /* Try to connect to TCP server(Socket, DestIP, DestPort) */
else if(loopback_mode == AS_IPV6)
ret = connect(sn, destip, destport, 16); /* Try to connect to TCP server(Socket, DestIP, DestPort) */
printf("SOCK Status: %d\r\n", ret);
if( ret != SOCK_OK) return ret; // Try to TCP connect to the TCP server (destination)
break;
case SOCK_CLOSED:
switch(loopback_mode)
{
case AS_IPV4:
tmp = socket(sn, Sn_MR_TCP4, any_port++, SOCK_IO_NONBLOCK);
break;
case AS_IPV6:
tmp = socket(sn, Sn_MR_TCP6, any_port++, SOCK_IO_NONBLOCK);
break;
case AS_IPDUAL:
tmp = socket(sn, Sn_MR_TCPD, any_port++, SOCK_IO_NONBLOCK);
break;
default:
break;
}
if(tmp != sn){ /* reinitialize the socket */
#ifdef _LOOPBACK_DEBUG_
printf("%d : Fail to create socket.\r\n",sn);
#endif
return SOCKERR_SOCKNUM;
}
printf("%d:Socket opened[%d]\r\n",sn, getSn_SR(sn));
sock_state[sn] = 1;
break;
default:
break;
}
return 1;
}主函数就比较简单,在此之前我们先声明socket端口号和所用最大的缓存大小,不做分片处理默认为2KB;然后初始化网络信息、目标IP地址和目标端口,最后在while循环里调用loopback_tcpc并传入相应参数即可。
注意:这里的目的IP地址设置为我们的电脑IP地址,因为我们要让电脑端作为服务器,使用网络调试助手进行数据回环测试;另外目标端口选择尽量避免使用特殊端口,这里使用8080
#define SOCKET_ID 0
#define ETHERNET_BUF_MAX_SIZE (1024 * 2)
void network_init(void);
wiz_NetInfo net_info = {
.mac = {0x00, 0x08, 0xdc, 0x16, 0xed, 0x2e},
.ip = {192, 168, 1, 10},
.sn = {255, 255, 255, 0},
.gw = {192, 168, 1, 1},
.dns = {8, 8, 8, 8},
.ipmode = NETINFO_STATIC_V4};
wiz_NetInfo get_info;
static uint8_t ethernet_buf[ETHERNET_BUF_MAX_SIZE] = {0,};
static uint8_t des_ip[4] = {192, 168, 1, 2};
static uint16_t des_port = 8080;
int main()
{
stdio_init_all();
sleep_ms(2000);
network_init();
while(true)
{
loopback_tcpc(SOCKET_ID, ethernet_buf, des_ip, des_port, AS_IPV4);
sleep_ms(500);
}
}
void network_init(void)
{
uint8_t temp;
wizchip_initialize();
printf("W6100 dns test example.\r\n");
sleep_ms(2000);
/* Determine the network lock register status */
if(!ctlwizchip(SYS_NET_LOCK, &temp))
{
printf("unlock.\n");
NETUNLOCK();
}
wizchip_setnetinfo(&net_info);
print_net_info(&get_info);
sleep_ms(2000);
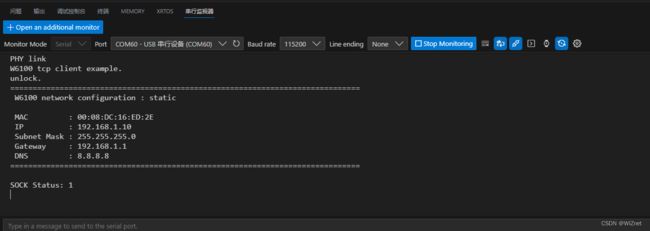
}2.测试现象
我们编译烧录后,打开串行监视器,可以看到,配置相关信息后,尝试连接我们初始化设置的目的IP(电脑IP),然后我们在电脑上打开网络调试助手,选择tcp服务器模式,IP选择电脑的本机IP(一般默认即为电脑IP),端口号写8080(跟我们在开发板配置的信息一致,不然监听不到),配置完成打开后,可以看到客户端上线提示,尝试发送数据,可以看到成功回传。

我们也可以在打开wireshark抓包工具,输入命令

相关链接:
本章相应例程链接 https://gitee.com/wiznet-hk/example-of-w6100-evb-pico.gitwireshark抓包工具下载链接https://www.wireshark.org/download.html
https://gitee.com/wiznet-hk/example-of-w6100-evb-pico.gitwireshark抓包工具下载链接https://www.wireshark.org/download.html