Faster-RCNN特征图可视化
Faster-RCNN特征图可视化
pytorch官方的FasterRCNN算法,backbone部分是加了FPN的resnet50,整体是这样的结构 。由于特征矩阵实在是看不懂在一层一层的Layer中发生了什么效果,因此将每一层的特征图绘制出来。
1. 算法结构
大佬画的FasterRCNN算法结构:
FasterRCNN四大接口:
transform
backbone
rpn
roi_heads
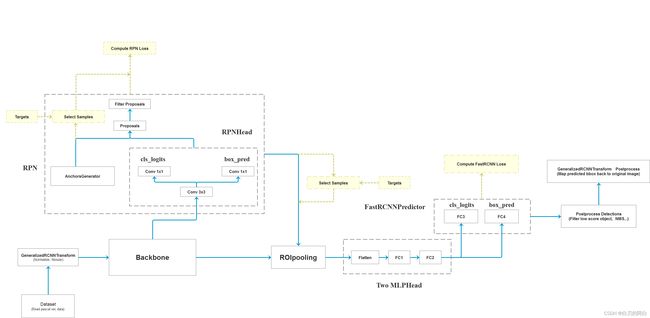
Backbone的输入是张图像,输出是feature map(特征图)。这些特征图会送去后面的RPN(区域建议网络),然后RPN生成proposal,再进行后续ROIPooling、分类。
我们可视化特征图其实和predict流程差不多,但就是只针对Backbone这部分的输出,不涉及到RPN往后的部分,因此不需要跑完predict流程。
2.特征图可视化完整代码
为了省事,这个代码是根据predict的过程改的,也是建立模型,加载权重,读取图像,并进行transform,把图像输入模型的步骤。我把加载json的过程注释了,只要看特征图不做分类的话用不到。
重点:这里是取resnet每一个layer的特征图!不是每个layer里面bottleneck的,更不是每一层卷积之后的!那就太多啦。关于resnet这部分文末有完整结构,记录一下
import os
# import json
import numpy as np
import torch
from PIL import Image
from torchvision import transforms
import matplotlib.pyplot as plt
from network_files import FasterRCNN
from backbone import resnet50_fpn_backbone, MobileNetV2
# from torchvision.models.detection import fasterrcnn_resnet50_fpn
# img_formats = ['bmp', 'jpg', 'jpeg', 'png', 'tif', 'tiff', 'dng', 'webp', 'mpo']
def main():
# get devices
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print("using {} device.".format(device))
# create model
backbone = resnet50_fpn_backbone(norm_layer=torch.nn.BatchNorm2d)
model = FasterRCNN(backbone=backbone, num_classes=6, rpn_score_thresh=0.5)
#train_weights = "./save_weights/model.pth"
train_weights = "./save_weights/resNetFpn-model-14.pth"
assert os.path.exists(train_weights), "{} file dose not exist.".format(train_weights)
model.load_state_dict(torch.load(train_weights, map_location=device)["model"])
model.to(device)
# read class_indict
# label_json_path = './my_classes.json'
# assert os.path.exists(label_json_path), "json file {} dose not exist.".format(label_json_path)
# json_file = open(label_json_path, 'r')
# class_dict = json.load(json_file)
# category_index = {v: k for k, v in class_dict.items()}
# load image
imagename = '4.jpg'
original_img = Image.open("./others/"+ imagename)
# from pil image to tensor, do not normalize image
data_transform = transforms.Compose([transforms.ToTensor()])
img = data_transform(original_img)
# expand batch dimension
img = torch.unsqueeze(img, dim=0)
model.eval()
with torch.no_grad():
# Inference
# predictions = model(img.to(device))[0]
features = model.backbone.forward(img.to(device))
features = list(features.values())
for feature in features:
feature = feature.detach().cpu().numpy()
im = np.squeeze(feature)
im = np.transpose(im, [1, 2, 0])
plt.figure()
for i in range (12):
ax = plt.subplot(3, 4, i+1)
plt.imshow(im[:, :, 1])
plt.show()
if __name__ == '__main__':
main()
获取到features之后,对每一个特征图进行的操作:
cuda张量要先转换为cpu的张量才能够转化为np
用np.squeeze去掉shape的batch那个维度,即 (N,C,H,W )–> (C,H,W),因为前面有进行torch.unsqueeze(dim=0)为图增加了第0维batch这个维度,所以这里要去掉。
然后np.transpose通道数交换,即 (C,H,W) --> (H,W,C)。高度,宽度,channel放最后。
最后for循环打印12张特征图,这个就可以随意了。 [:, :, 1]的意思是对应三个维度H,W,C ,1是C(channel)的索引值。
关于代码中的features = model.backbone.forward(img.to(device)),是把图片作为输入,取主干网前向传播的结果。之所以可以这么写是因为我主干网的前向传播是这样的:
class BackboneWithFPN(nn.Module):
def __init__(self, backbone, return_layers, in_channels_list, out_channels, extra_blocks=None):
super(BackboneWithFPN, self).__init__()
if extra_blocks is None:
extra_blocks = LastLevelMaxPool()
self.body = IntermediateLayerGetter(backbone, return_layers=return_layers)
self.fpn = FeaturePyramidNetwork(
in_channels_list=in_channels_list,
out_channels=out_channels,
extra_blocks=extra_blocks,
)
self.out_channels = out_channels
def forward(self, x):
x = self.body(x)
x = self.fpn(x)
return x
class IntermediateLayerGetter(nn.ModuleDict):
__annotations__ = {
"return_layers": Dict[str, str],
}
def __init__(self, model, return_layers):
if not set(return_layers).issubset([name for name, _ in model.named_children()]):
raise ValueError("return_layers are not present in model")
orig_return_layers = return_layers
return_layers = {str(k): str(v) for k, v in return_layers.items()}
layers = OrderedDict()
for name, module in model.named_children():
layers[name] = module
if name in return_layers:
del return_layers[name]
if not return_layers:
break
super(IntermediateLayerGetter, self).__init__(layers)
self.return_layers = orig_return_layers
def forward(self, x):
out = OrderedDict()
# 收集layer1, layer2, layer3, layer4的输出
for name, module in self.items():
x = module(x)
if name in self.return_layers:
out_name = self.return_layers[name]
out[out_name] = x
return out
实际上IntermediateLayerGetter前向传播函数的out就存储了层级结构,是resnet的四层,加上一个extra block ,即最后一层的MaxPool
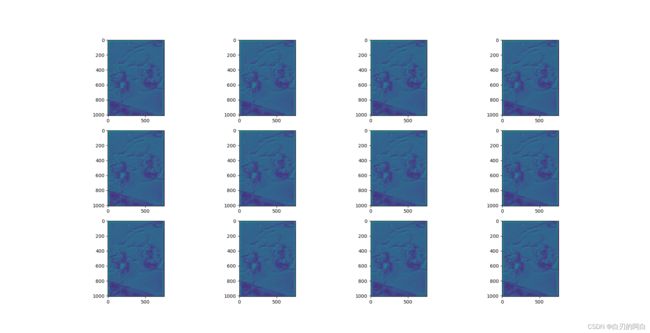
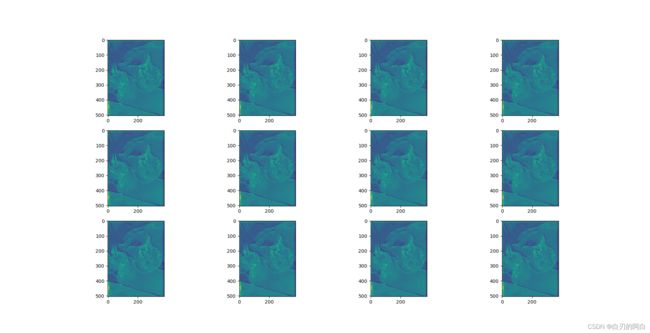
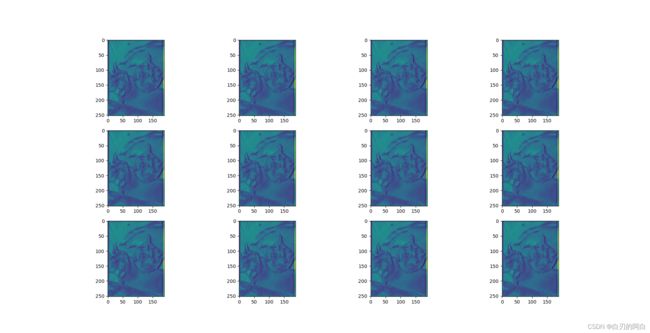
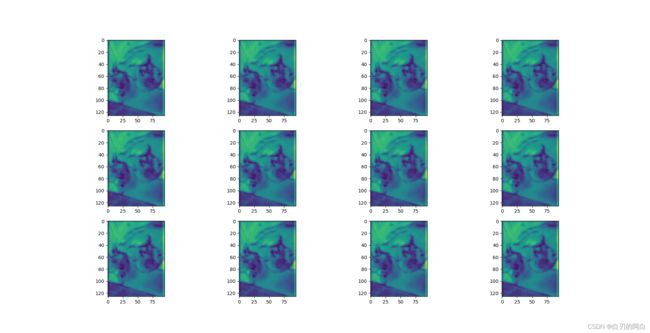
3.特征图
输出的5张特征图,分别对应layer1,layer2,layer3,layer4,LastLevelMaxPool。这里只放出四个layer的特征图。从尺寸的变化可以看出采样的过程了。随着下采样,图像越来越小,从底层信息变为高层信息,语义特征也更为明显。
4.附:主干网的完整层级结构
(backbone): BackboneWithFPN(
(body): IntermediateLayerGetter(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): Bottleneck(
(conv1): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(256, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(64, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer2): Sequential(
(0): Bottleneck(
(conv1): Conv2d(256, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(512, 128, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(128, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer3): Sequential(
(0): Bottleneck(
(conv1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(512, 1024, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(3): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(4): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(5): Bottleneck(
(conv1): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(256, 1024, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(1024, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
(layer4): Sequential(
(0): Bottleneck(
(conv1): Conv2d(1024, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(downsample): Sequential(
(0): Conv2d(1024, 2048, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
(2): Bottleneck(
(conv1): Conv2d(2048, 512, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(conv3): Conv2d(512, 2048, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn3): BatchNorm2d(2048, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
)
)
)
(fpn): FeaturePyramidNetwork(
(inner_blocks): ModuleList(
(0): Conv2d(256, 256, kernel_size=(1, 1), stride=(1, 1))
(1): Conv2d(512, 256, kernel_size=(1, 1), stride=(1, 1))
(2): Conv2d(1024, 256, kernel_size=(1, 1), stride=(1, 1))
(3): Conv2d(2048, 256, kernel_size=(1, 1), stride=(1, 1))
)
(layer_blocks): ModuleList(
(0): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
)
(extra_blocks): LastLevelMaxPool()
)
)