基于Qlearning强化学习的路径规划算法matlab仿真
目录
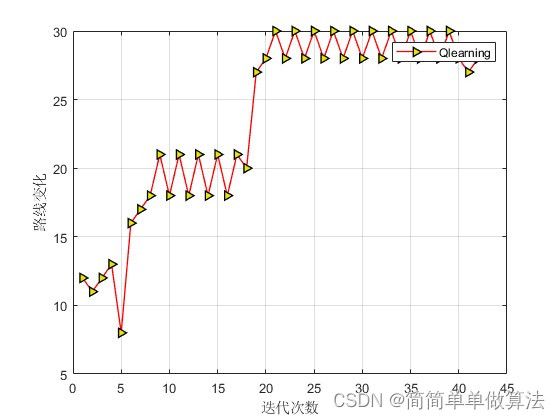
1.算法运行效果图预览
2.算法运行软件版本
3.部分核心程序
4.算法理论概述
4.1 Q值更新规则
4.2 基于Q-learning的路径规划算法设计
4.3 Q-learning路径规划流程
5.算法完整程序工程
1.算法运行效果图预览


2.算法运行软件版本
MATLAB2022A
3.部分核心程序
...................................................
[T,crowd,flow,R] = Update_M(T,crowd,flow,width,dis,cor,XY1);
last_s = XYs;
[Q,XYs] = qlearning(Q,R,XYs,XY1);
Reward0 = Reward0 + R(last_s,XYs);
figure;
plot(Rewards,'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
grid on
xlabel('迭代次数');
ylabel('奖励值');
figure;
plot(path,'-r>',...
'LineWidth',1,...
'MarkerSize',6,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
hold on
grid on
xlabel('迭代次数');
ylabel('路线变化');
00394.算法理论概述
路径规划在机器人、自动驾驶等领域中具有重要应用。Q-learning是一种经典的强化学习算法,可以用于解决路径规划问题。本文介绍了基于Q-learning的路径规划算法,该算法可以在未知环境中学习最优路径,具有广泛的应用前景。Q-learning是一种基于值函数的强化学习算法,用于学习最优策略。在路径规划问题中,状态(State)表示机器人所处的位置,动作(Action)表示机器人可以采取的移动方向,奖励(Reward)表示机器人根据采取的动作获得的反馈。Q-learning的目标是学习一个Q值函数,用于评估在给定状态下采取某个动作的预期回报。
4.1 Q值更新规则
在每个时间步,Q-learning根据以下更新规则更新Q值:

4.2 基于Q-learning的路径规划算法设计
在路径规划中,状态可以表示机器人所处的位置坐标,动作可以表示机器人可以向上、下、左、右等方向移动。将Q值初始化为一个小的随机值或零。

可以通过逐渐减小学习率和折扣因子,或者使用不同的策略来调优算法,以实现更好的性能和收敛性。
4.3 Q-learning路径规划流程

基于Q-learning的路径规划算法可以在未知环境中学习最优路径,具有广泛的应用前景。通过合理的参数设置和调优,可以实现高效的路径规划。
5.算法完整程序工程
OOOOO
OOO
O