2、基于STM32CubeMX的FreeRTOS移植——第二章【FreeRTOS系统移植】
文章目录
- 一、STM32cubeMX详解
-
- 1.STM32CubeMX功能介绍
- 2.STM32CubeMX安装
- 二、配置FreeRTOS
-
- 1.使用STM32CubeMX配置FreeRTOS
- 2.工程代码分析
- 3.在任务中添加功能
一、STM32cubeMX详解
1.STM32CubeMX功能介绍
STM32CubeMX是一款功能强大的软件,为STM32微控制器应用程序开发提供了一种快捷方便的方法。它旨在提高开发效率,节省时间和费用,并用于优化STM32微控制器的性能和可靠性。STM32CubeMX的功能主要包括图形化配置HAL,性能分析,代码生成,仿真,调试和模拟功能。
1、图形化配置HAL: STM32CubeMX的图形化配置HAL功能支持使用图形化界面来配置STM32 HAL库,支持选择片上外设(如中断,DMA,ADC,TIM,GPIO等),使用图形化界面配置时序参数,从而可以支持STM32硬件定时器,硬件时钟,DMA等功能和参数。
2、性能分析: STM32CubeMX可以对STM32应用程序和性能进行分析,并可以识别内存使用情况,执行速度和电源使用情况。此外,STM32CubeMX还为客户提供了应用程序的基本性能参数,以识别系统性能的低点,提高系统性能。
3、代码生成: STM32CubeMX不仅可以使用图形化工具配置芯片,还可以生成相应的源代码用于程序开发。此外,STM32CubeMX还提供了配置文件和模板,可以帮助用户快速开发STM32应用程序。
4、仿真: STM32CubeMX支持仿真功能,可以模拟STM32应用程序的运行状况,进行检查和调试,并发现在程序中可能出现的错误,从而可以更好地控制应用程序的质量。
5、调试和模拟: STM32CubeMX支持基于串口的仿真和调试功能,可以实现双向调试,查看应用程序的运行状况,进行故障排查和程序调试。此外,STM32CubeMX还支持一些常用的硬件模拟器,可以通过模拟器来进行测试和调试。
2.STM32CubeMX安装
- 进入STM32CubeMX下载官网。
- 下滑到获取软件界面,选择对应的系统和对应版本。
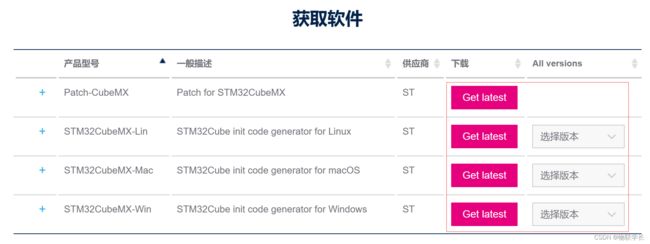
- 选择语言和路径后完成安装
二、配置FreeRTOS
1.使用STM32CubeMX配置FreeRTOS
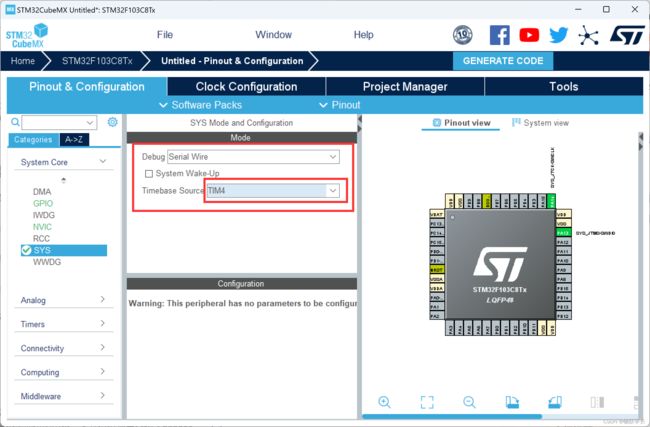
- 选择对应的芯片(本文选用STM32F103C8T6最小系统来进行教学)
- 系统时钟源选择除系统时钟的任意一个,本文选择TIM4作为时钟源,因为FreeRTOS会占用系统时钟。
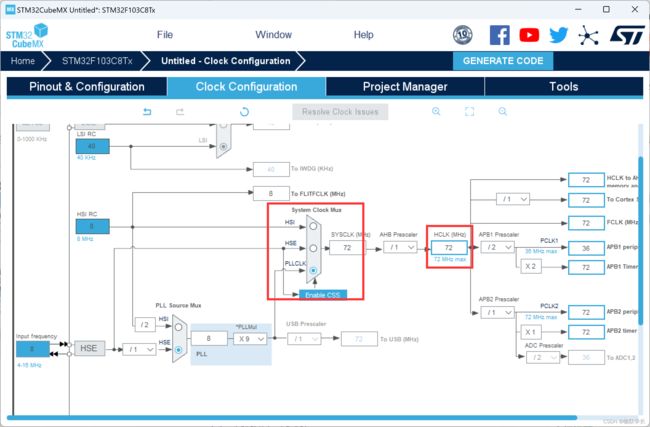
- 晶振选择外部高速晶振

- 时钟树配置
- FreeRTOS系统移植
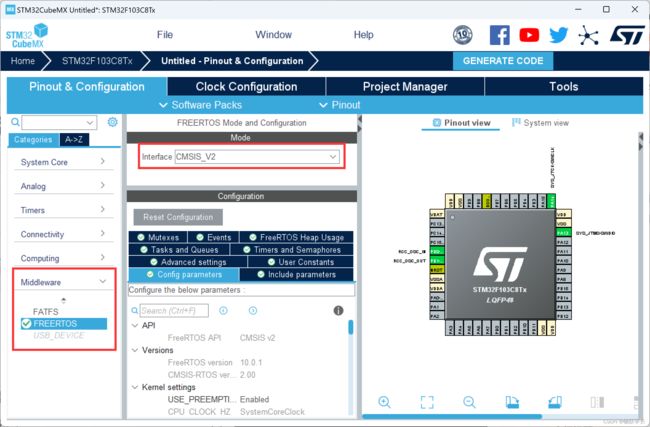
在Middleware下面选择FREERTOS,然后在Interface选择最新的版本CMISIS_V2。
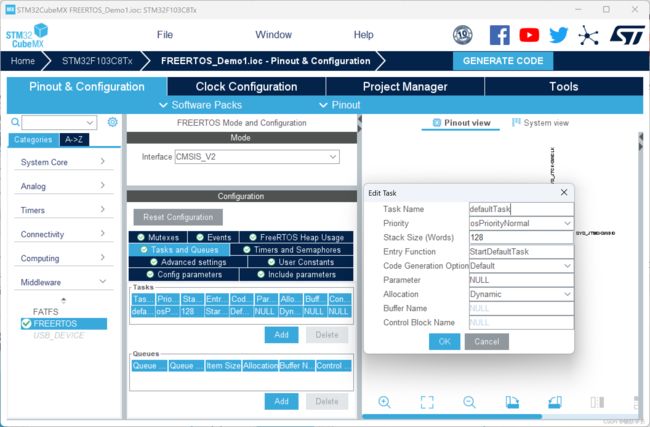
在Task and Queues中双击默认的任务,系统自动生成了一个名为defaultTask的任务,优先级为osPriorityNormal,占空间大小128words,任务的函数名为StartDefaultTask。 - 生成工程代码
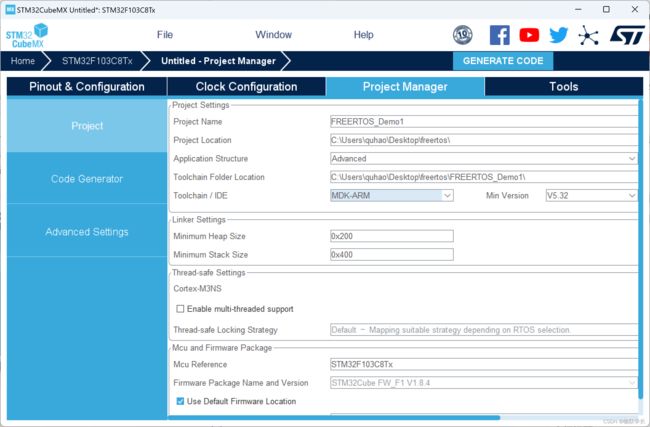
设置工程名称和保存路径后设置工程代码规范。
完成设置后点击GENERATE CODE生成工程文件。 - 打开工程编译项目
如果编译没问题,说明移植成功。如出现如下报错

这是因为安装的最新版的keil软件不包含5.x的编译器,选择魔术棒工具将编译器版本设置为6.x版本。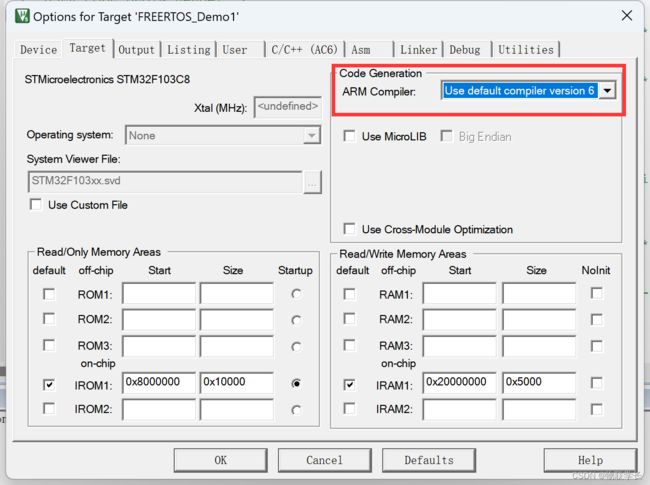 在FreeRTOS官网下载FreeRTOS的源代码。,将官方代码的FreeRTOSv10.4.1\FreeRTOSv10.4.1\FreeRTOS\Source\portable\RVDS\ARM_CM3文件夹下的文件(port.c和portmacro.h)复制到STM32CubeMX的Middlewares\Third_Party\FreeRTOS\Source\portable\RVDS\ARM_CM3路径下,再次编译就没有报错了。
在FreeRTOS官网下载FreeRTOS的源代码。,将官方代码的FreeRTOSv10.4.1\FreeRTOSv10.4.1\FreeRTOS\Source\portable\RVDS\ARM_CM3文件夹下的文件(port.c和portmacro.h)复制到STM32CubeMX的Middlewares\Third_Party\FreeRTOS\Source\portable\RVDS\ARM_CM3路径下,再次编译就没有报错了。 如果觉得麻烦,可以选择使用STM32CubeIDE。
如果觉得麻烦,可以选择使用STM32CubeIDE。
如果不想下载源代码,可以将文末的代码复制替换掉CubeMX生成的port.c和portmacro.h。
2.工程代码分析
刚刚使用CubeMX生成的工程中,找到freertos.c文件。下滑找到StartDefaultTask这个函数,就是defaultTask的任务函数。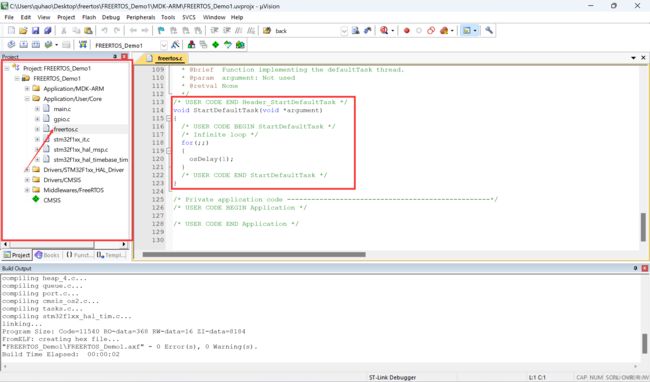 代码的51到56行定义就是在任务配置界面配置的参数。
代码的51到56行定义就是在任务配置界面配置的参数。
osThreadId_t defaultTaskHandle; //任务defaultTask的任务句柄
const osThreadAttr_t defaultTask_attributes = {
.name = "defaultTask", //任务的注释名称
.stack_size = 128 * 4, //任务的栈空间大小
.priority = (osPriority_t) osPriorityNormal, //任务优先级
};
3.在任务中添加功能
STM32F103C8T6最小系统版的PC13引脚有一个LED灯,在STM32CubeMX中将该引脚设置为output模式,然后再任务函数中添加如下代码
void StartDefaultTask(void *argument)
{
/* USER CODE BEGIN StartDefaultTask */
/* Infinite loop */
for(;;)
{
HAL_GPIO_TogglePin(GPIOC,GPIO_PIN_13);//翻转GPIO PC13
osDelay(500); //延时500个时钟节拍
} /* USER CODE END StartDefaultTask */
}
编译后将程序下载进STM32F103C8T6中,LED每隔500ms反转一次。
将如下代码替换port.c文件
/*
* FreeRTOS Kernel V10.4.1
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* https://www.FreeRTOS.org
* https://github.com/FreeRTOS
*
*/
/*-----------------------------------------------------------
* Implementation of functions defined in portable.h for the ARM CM3 port.
*----------------------------------------------------------*/
/* Scheduler includes. */
#include "FreeRTOS.h"
#include "task.h"
/* For backward compatibility, ensure configKERNEL_INTERRUPT_PRIORITY is
* defined. The value should also ensure backward compatibility.
* FreeRTOS.org versions prior to V4.4.0 did not include this definition. */
#ifndef configKERNEL_INTERRUPT_PRIORITY
#define configKERNEL_INTERRUPT_PRIORITY 255
#endif
#ifndef configSYSTICK_CLOCK_HZ
#define configSYSTICK_CLOCK_HZ configCPU_CLOCK_HZ
/* Ensure the SysTick is clocked at the same frequency as the core. */
#define portNVIC_SYSTICK_CLK_BIT ( 1UL << 2UL )
#else
/* The way the SysTick is clocked is not modified in case it is not the same
* as the core. */
#define portNVIC_SYSTICK_CLK_BIT ( 0 )
#endif
/* Constants required to manipulate the core. Registers first... */
#define portNVIC_SYSTICK_CTRL_REG ( *( ( volatile uint32_t * ) 0xe000e010 ) )
#define portNVIC_SYSTICK_LOAD_REG ( *( ( volatile uint32_t * ) 0xe000e014 ) )
#define portNVIC_SYSTICK_CURRENT_VALUE_REG ( *( ( volatile uint32_t * ) 0xe000e018 ) )
#define portNVIC_SHPR3_REG ( *( ( volatile uint32_t * ) 0xe000ed20 ) )
/* ...then bits in the registers. */
#define portNVIC_SYSTICK_INT_BIT ( 1UL << 1UL )
#define portNVIC_SYSTICK_ENABLE_BIT ( 1UL << 0UL )
#define portNVIC_SYSTICK_COUNT_FLAG_BIT ( 1UL << 16UL )
#define portNVIC_PENDSVCLEAR_BIT ( 1UL << 27UL )
#define portNVIC_PEND_SYSTICK_CLEAR_BIT ( 1UL << 25UL )
#define portNVIC_PENDSV_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 16UL )
#define portNVIC_SYSTICK_PRI ( ( ( uint32_t ) configKERNEL_INTERRUPT_PRIORITY ) << 24UL )
/* Constants required to check the validity of an interrupt priority. */
#define portFIRST_USER_INTERRUPT_NUMBER ( 16 )
#define portNVIC_IP_REGISTERS_OFFSET_16 ( 0xE000E3F0 )
#define portAIRCR_REG ( *( ( volatile uint32_t * ) 0xE000ED0C ) )
#define portMAX_8_BIT_VALUE ( ( uint8_t ) 0xff )
#define portTOP_BIT_OF_BYTE ( ( uint8_t ) 0x80 )
#define portMAX_PRIGROUP_BITS ( ( uint8_t ) 7 )
#define portPRIORITY_GROUP_MASK ( 0x07UL << 8UL )
#define portPRIGROUP_SHIFT ( 8UL )
/* Masks off all bits but the VECTACTIVE bits in the ICSR register. */
#define portVECTACTIVE_MASK ( 0xFFUL )
/* Constants required to set up the initial stack. */
#define portINITIAL_XPSR ( 0x01000000UL )
/* The systick is a 24-bit counter. */
#define portMAX_24_BIT_NUMBER ( 0xffffffUL )
/* A fiddle factor to estimate the number of SysTick counts that would have
* occurred while the SysTick counter is stopped during tickless idle
* calculations. */
#define portMISSED_COUNTS_FACTOR ( 45UL )
/* For strict compliance with the Cortex-M spec the task start address should
* have bit-0 clear, as it is loaded into the PC on exit from an ISR. */
#define portSTART_ADDRESS_MASK ( ( StackType_t ) 0xfffffffeUL )
/* Let the user override the pre-loading of the initial LR with the address of
* prvTaskExitError() in case it messes up unwinding of the stack in the
* debugger. */
#ifdef configTASK_RETURN_ADDRESS
#define portTASK_RETURN_ADDRESS configTASK_RETURN_ADDRESS
#else
#define portTASK_RETURN_ADDRESS prvTaskExitError
#endif
/*
* Setup the timer to generate the tick interrupts. The implementation in this
* file is weak to allow application writers to change the timer used to
* generate the tick interrupt.
*/
void vPortSetupTimerInterrupt( void );
/*
* Exception handlers.
*/
void xPortPendSVHandler( void ) __attribute__( ( naked ) );
void xPortSysTickHandler( void );
void vPortSVCHandler( void ) __attribute__( ( naked ) );
/*
* Start first task is a separate function so it can be tested in isolation.
*/
static void prvPortStartFirstTask( void ) __attribute__( ( naked ) );
/*
* Used to catch tasks that attempt to return from their implementing function.
*/
static void prvTaskExitError( void );
/*-----------------------------------------------------------*/
/* Each task maintains its own interrupt status in the critical nesting
* variable. */
static UBaseType_t uxCriticalNesting = 0xaaaaaaaa;
/*
* The number of SysTick increments that make up one tick period.
*/
#if ( configUSE_TICKLESS_IDLE == 1 )
static uint32_t ulTimerCountsForOneTick = 0;
#endif /* configUSE_TICKLESS_IDLE */
/*
* The maximum number of tick periods that can be suppressed is limited by the
* 24 bit resolution of the SysTick timer.
*/
#if ( configUSE_TICKLESS_IDLE == 1 )
static uint32_t xMaximumPossibleSuppressedTicks = 0;
#endif /* configUSE_TICKLESS_IDLE */
/*
* Compensate for the CPU cycles that pass while the SysTick is stopped (low
* power functionality only.
*/
#if ( configUSE_TICKLESS_IDLE == 1 )
static uint32_t ulStoppedTimerCompensation = 0;
#endif /* configUSE_TICKLESS_IDLE */
/*
* Used by the portASSERT_IF_INTERRUPT_PRIORITY_INVALID() macro to ensure
* FreeRTOS API functions are not called from interrupts that have been assigned
* a priority above configMAX_SYSCALL_INTERRUPT_PRIORITY.
*/
#if ( configASSERT_DEFINED == 1 )
static uint8_t ucMaxSysCallPriority = 0;
static uint32_t ulMaxPRIGROUPValue = 0;
static const volatile uint8_t * const pcInterruptPriorityRegisters = ( const volatile uint8_t * const ) portNVIC_IP_REGISTERS_OFFSET_16;
#endif /* configASSERT_DEFINED */
/*-----------------------------------------------------------*/
/*
* See header file for description.
*/
StackType_t * pxPortInitialiseStack( StackType_t * pxTopOfStack,
TaskFunction_t pxCode,
void * pvParameters )
{
/* Simulate the stack frame as it would be created by a context switch
* interrupt. */
pxTopOfStack--; /* Offset added to account for the way the MCU uses the stack on entry/exit of interrupts. */
*pxTopOfStack = portINITIAL_XPSR; /* xPSR */
pxTopOfStack--;
*pxTopOfStack = ( ( StackType_t ) pxCode ) & portSTART_ADDRESS_MASK; /* PC */
pxTopOfStack--;
*pxTopOfStack = ( StackType_t ) portTASK_RETURN_ADDRESS; /* LR */
pxTopOfStack -= 5; /* R12, R3, R2 and R1. */
*pxTopOfStack = ( StackType_t ) pvParameters; /* R0 */
pxTopOfStack -= 8; /* R11, R10, R9, R8, R7, R6, R5 and R4. */
return pxTopOfStack;
}
/*-----------------------------------------------------------*/
static void prvTaskExitError( void )
{
volatile uint32_t ulDummy = 0UL;
/* A function that implements a task must not exit or attempt to return to
* its caller as there is nothing to return to. If a task wants to exit it
* should instead call vTaskDelete( NULL ).
*
* Artificially force an assert() to be triggered if configASSERT() is
* defined, then stop here so application writers can catch the error. */
configASSERT( uxCriticalNesting == ~0UL );
portDISABLE_INTERRUPTS();
while( ulDummy == 0 )
{
/* This file calls prvTaskExitError() after the scheduler has been
* started to remove a compiler warning about the function being defined
* but never called. ulDummy is used purely to quieten other warnings
* about code appearing after this function is called - making ulDummy
* volatile makes the compiler think the function could return and
* therefore not output an 'unreachable code' warning for code that appears
* after it. */
}
}
/*-----------------------------------------------------------*/
void vPortSVCHandler( void )
{
__asm volatile (
" ldr r3, pxCurrentTCBConst2 \n"/* Restore the context. */
" ldr r1, [r3] \n"/* Use pxCurrentTCBConst to get the pxCurrentTCB address. */
" ldr r0, [r1] \n"/* The first item in pxCurrentTCB is the task top of stack. */
" ldmia r0!, {r4-r11} \n"/* Pop the registers that are not automatically saved on exception entry and the critical nesting count. */
" msr psp, r0 \n"/* Restore the task stack pointer. */
" isb \n"
" mov r0, #0 \n"
" msr basepri, r0 \n"
" orr r14, #0xd \n"
" bx r14 \n"
" \n"
" .align 4 \n"
"pxCurrentTCBConst2: .word pxCurrentTCB \n"
);
}
/*-----------------------------------------------------------*/
static void prvPortStartFirstTask( void )
{
__asm volatile (
" ldr r0, =0xE000ED08 \n"/* Use the NVIC offset register to locate the stack. */
" ldr r0, [r0] \n"
" ldr r0, [r0] \n"
" msr msp, r0 \n"/* Set the msp back to the start of the stack. */
" cpsie i \n"/* Globally enable interrupts. */
" cpsie f \n"
" dsb \n"
" isb \n"
" svc 0 \n"/* System call to start first task. */
" nop \n"
" .ltorg \n"
);
}
/*-----------------------------------------------------------*/
/*
* See header file for description.
*/
BaseType_t xPortStartScheduler( void )
{
/* configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to 0.
* See https://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html */
configASSERT( configMAX_SYSCALL_INTERRUPT_PRIORITY );
#if ( configASSERT_DEFINED == 1 )
{
volatile uint32_t ulOriginalPriority;
volatile uint8_t * const pucFirstUserPriorityRegister = ( volatile uint8_t * const ) ( portNVIC_IP_REGISTERS_OFFSET_16 + portFIRST_USER_INTERRUPT_NUMBER );
volatile uint8_t ucMaxPriorityValue;
/* Determine the maximum priority from which ISR safe FreeRTOS API
* functions can be called. ISR safe functions are those that end in
* "FromISR". FreeRTOS maintains separate thread and ISR API functions to
* ensure interrupt entry is as fast and simple as possible.
*
* Save the interrupt priority value that is about to be clobbered. */
ulOriginalPriority = *pucFirstUserPriorityRegister;
/* Determine the number of priority bits available. First write to all
* possible bits. */
*pucFirstUserPriorityRegister = portMAX_8_BIT_VALUE;
/* Read the value back to see how many bits stuck. */
ucMaxPriorityValue = *pucFirstUserPriorityRegister;
/* Use the same mask on the maximum system call priority. */
ucMaxSysCallPriority = configMAX_SYSCALL_INTERRUPT_PRIORITY & ucMaxPriorityValue;
/* Calculate the maximum acceptable priority group value for the number
* of bits read back. */
ulMaxPRIGROUPValue = portMAX_PRIGROUP_BITS;
while( ( ucMaxPriorityValue & portTOP_BIT_OF_BYTE ) == portTOP_BIT_OF_BYTE )
{
ulMaxPRIGROUPValue--;
ucMaxPriorityValue <<= ( uint8_t ) 0x01;
}
#ifdef __NVIC_PRIO_BITS
{
/* Check the CMSIS configuration that defines the number of
* priority bits matches the number of priority bits actually queried
* from the hardware. */
configASSERT( ( portMAX_PRIGROUP_BITS - ulMaxPRIGROUPValue ) == __NVIC_PRIO_BITS );
}
#endif
#ifdef configPRIO_BITS
{
/* Check the FreeRTOS configuration that defines the number of
* priority bits matches the number of priority bits actually queried
* from the hardware. */
configASSERT( ( portMAX_PRIGROUP_BITS - ulMaxPRIGROUPValue ) == configPRIO_BITS );
}
#endif
/* Shift the priority group value back to its position within the AIRCR
* register. */
ulMaxPRIGROUPValue <<= portPRIGROUP_SHIFT;
ulMaxPRIGROUPValue &= portPRIORITY_GROUP_MASK;
/* Restore the clobbered interrupt priority register to its original
* value. */
*pucFirstUserPriorityRegister = ulOriginalPriority;
}
#endif /* conifgASSERT_DEFINED */
/* Make PendSV and SysTick the lowest priority interrupts. */
portNVIC_SHPR3_REG |= portNVIC_PENDSV_PRI;
portNVIC_SHPR3_REG |= portNVIC_SYSTICK_PRI;
/* Start the timer that generates the tick ISR. Interrupts are disabled
* here already. */
vPortSetupTimerInterrupt();
/* Initialise the critical nesting count ready for the first task. */
uxCriticalNesting = 0;
/* Start the first task. */
prvPortStartFirstTask();
/* Should never get here as the tasks will now be executing! Call the task
* exit error function to prevent compiler warnings about a static function
* not being called in the case that the application writer overrides this
* functionality by defining configTASK_RETURN_ADDRESS. Call
* vTaskSwitchContext() so link time optimisation does not remove the
* symbol. */
vTaskSwitchContext();
prvTaskExitError();
/* Should not get here! */
return 0;
}
/*-----------------------------------------------------------*/
void vPortEndScheduler( void )
{
/* Not implemented in ports where there is nothing to return to.
* Artificially force an assert. */
configASSERT( uxCriticalNesting == 1000UL );
}
/*-----------------------------------------------------------*/
void vPortEnterCritical( void )
{
portDISABLE_INTERRUPTS();
uxCriticalNesting++;
/* This is not the interrupt safe version of the enter critical function so
* assert() if it is being called from an interrupt context. Only API
* functions that end in "FromISR" can be used in an interrupt. Only assert if
* the critical nesting count is 1 to protect against recursive calls if the
* assert function also uses a critical section. */
if( uxCriticalNesting == 1 )
{
configASSERT( ( portNVIC_INT_CTRL_REG & portVECTACTIVE_MASK ) == 0 );
}
}
/*-----------------------------------------------------------*/
void vPortExitCritical( void )
{
configASSERT( uxCriticalNesting );
uxCriticalNesting--;
if( uxCriticalNesting == 0 )
{
portENABLE_INTERRUPTS();
}
}
/*-----------------------------------------------------------*/
void xPortPendSVHandler( void )
{
/* This is a naked function. */
__asm volatile
(
" mrs r0, psp \n"
" isb \n"
" \n"
" ldr r3, pxCurrentTCBConst \n"/* Get the location of the current TCB. */
" ldr r2, [r3] \n"
" \n"
" stmdb r0!, {r4-r11} \n"/* Save the remaining registers. */
" str r0, [r2] \n"/* Save the new top of stack into the first member of the TCB. */
" \n"
" stmdb sp!, {r3, r14} \n"
" mov r0, %0 \n"
" msr basepri, r0 \n"
" bl vTaskSwitchContext \n"
" mov r0, #0 \n"
" msr basepri, r0 \n"
" ldmia sp!, {r3, r14} \n"
" \n"/* Restore the context, including the critical nesting count. */
" ldr r1, [r3] \n"
" ldr r0, [r1] \n"/* The first item in pxCurrentTCB is the task top of stack. */
" ldmia r0!, {r4-r11} \n"/* Pop the registers. */
" msr psp, r0 \n"
" isb \n"
" bx r14 \n"
" \n"
" .align 4 \n"
"pxCurrentTCBConst: .word pxCurrentTCB \n"
::"i" ( configMAX_SYSCALL_INTERRUPT_PRIORITY )
);
}
/*-----------------------------------------------------------*/
void xPortSysTickHandler( void )
{
/* The SysTick runs at the lowest interrupt priority, so when this interrupt
* executes all interrupts must be unmasked. There is therefore no need to
* save and then restore the interrupt mask value as its value is already
* known. */
portDISABLE_INTERRUPTS();
{
/* Increment the RTOS tick. */
if( xTaskIncrementTick() != pdFALSE )
{
/* A context switch is required. Context switching is performed in
* the PendSV interrupt. Pend the PendSV interrupt. */
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
}
}
portENABLE_INTERRUPTS();
}
/*-----------------------------------------------------------*/
#if ( configUSE_TICKLESS_IDLE == 1 )
__attribute__( ( weak ) ) void vPortSuppressTicksAndSleep( TickType_t xExpectedIdleTime )
{
uint32_t ulReloadValue, ulCompleteTickPeriods, ulCompletedSysTickDecrements;
TickType_t xModifiableIdleTime;
/* Make sure the SysTick reload value does not overflow the counter. */
if( xExpectedIdleTime > xMaximumPossibleSuppressedTicks )
{
xExpectedIdleTime = xMaximumPossibleSuppressedTicks;
}
/* Stop the SysTick momentarily. The time the SysTick is stopped for
* is accounted for as best it can be, but using the tickless mode will
* inevitably result in some tiny drift of the time maintained by the
* kernel with respect to calendar time. */
portNVIC_SYSTICK_CTRL_REG &= ~portNVIC_SYSTICK_ENABLE_BIT;
/* Calculate the reload value required to wait xExpectedIdleTime
* tick periods. -1 is used because this code will execute part way
* through one of the tick periods. */
ulReloadValue = portNVIC_SYSTICK_CURRENT_VALUE_REG + ( ulTimerCountsForOneTick * ( xExpectedIdleTime - 1UL ) );
if( ulReloadValue > ulStoppedTimerCompensation )
{
ulReloadValue -= ulStoppedTimerCompensation;
}
/* Enter a critical section but don't use the taskENTER_CRITICAL()
* method as that will mask interrupts that should exit sleep mode. */
__asm volatile ( "cpsid i" ::: "memory" );
__asm volatile ( "dsb" );
__asm volatile ( "isb" );
/* If a context switch is pending or a task is waiting for the scheduler
* to be unsuspended then abandon the low power entry. */
if( eTaskConfirmSleepModeStatus() == eAbortSleep )
{
/* Restart from whatever is left in the count register to complete
* this tick period. */
portNVIC_SYSTICK_LOAD_REG = portNVIC_SYSTICK_CURRENT_VALUE_REG;
/* Restart SysTick. */
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
/* Reset the reload register to the value required for normal tick
* periods. */
portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
/* Re-enable interrupts - see comments above the cpsid instruction()
* above. */
__asm volatile ( "cpsie i" ::: "memory" );
}
else
{
/* Set the new reload value. */
portNVIC_SYSTICK_LOAD_REG = ulReloadValue;
/* Clear the SysTick count flag and set the count value back to
* zero. */
portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
/* Restart SysTick. */
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
/* Sleep until something happens. configPRE_SLEEP_PROCESSING() can
* set its parameter to 0 to indicate that its implementation contains
* its own wait for interrupt or wait for event instruction, and so wfi
* should not be executed again. However, the original expected idle
* time variable must remain unmodified, so a copy is taken. */
xModifiableIdleTime = xExpectedIdleTime;
configPRE_SLEEP_PROCESSING( xModifiableIdleTime );
if( xModifiableIdleTime > 0 )
{
__asm volatile ( "dsb" ::: "memory" );
__asm volatile ( "wfi" );
__asm volatile ( "isb" );
}
configPOST_SLEEP_PROCESSING( xExpectedIdleTime );
/* Re-enable interrupts to allow the interrupt that brought the MCU
* out of sleep mode to execute immediately. see comments above
* __disable_interrupt() call above. */
__asm volatile ( "cpsie i" ::: "memory" );
__asm volatile ( "dsb" );
__asm volatile ( "isb" );
/* Disable interrupts again because the clock is about to be stopped
* and interrupts that execute while the clock is stopped will increase
* any slippage between the time maintained by the RTOS and calendar
* time. */
__asm volatile ( "cpsid i" ::: "memory" );
__asm volatile ( "dsb" );
__asm volatile ( "isb" );
/* Disable the SysTick clock without reading the
* portNVIC_SYSTICK_CTRL_REG register to ensure the
* portNVIC_SYSTICK_COUNT_FLAG_BIT is not cleared if it is set. Again,
* the time the SysTick is stopped for is accounted for as best it can
* be, but using the tickless mode will inevitably result in some tiny
* drift of the time maintained by the kernel with respect to calendar
* time*/
portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT );
/* Determine if the SysTick clock has already counted to zero and
* been set back to the current reload value (the reload back being
* correct for the entire expected idle time) or if the SysTick is yet
* to count to zero (in which case an interrupt other than the SysTick
* must have brought the system out of sleep mode). */
if( ( portNVIC_SYSTICK_CTRL_REG & portNVIC_SYSTICK_COUNT_FLAG_BIT ) != 0 )
{
uint32_t ulCalculatedLoadValue;
/* The tick interrupt is already pending, and the SysTick count
* reloaded with ulReloadValue. Reset the
* portNVIC_SYSTICK_LOAD_REG with whatever remains of this tick
* period. */
ulCalculatedLoadValue = ( ulTimerCountsForOneTick - 1UL ) - ( ulReloadValue - portNVIC_SYSTICK_CURRENT_VALUE_REG );
/* Don't allow a tiny value, or values that have somehow
* underflowed because the post sleep hook did something
* that took too long. */
if( ( ulCalculatedLoadValue < ulStoppedTimerCompensation ) || ( ulCalculatedLoadValue > ulTimerCountsForOneTick ) )
{
ulCalculatedLoadValue = ( ulTimerCountsForOneTick - 1UL );
}
portNVIC_SYSTICK_LOAD_REG = ulCalculatedLoadValue;
/* As the pending tick will be processed as soon as this
* function exits, the tick value maintained by the tick is stepped
* forward by one less than the time spent waiting. */
ulCompleteTickPeriods = xExpectedIdleTime - 1UL;
}
else
{
/* Something other than the tick interrupt ended the sleep.
* Work out how long the sleep lasted rounded to complete tick
* periods (not the ulReload value which accounted for part
* ticks). */
ulCompletedSysTickDecrements = ( xExpectedIdleTime * ulTimerCountsForOneTick ) - portNVIC_SYSTICK_CURRENT_VALUE_REG;
/* How many complete tick periods passed while the processor
* was waiting? */
ulCompleteTickPeriods = ulCompletedSysTickDecrements / ulTimerCountsForOneTick;
/* The reload value is set to whatever fraction of a single tick
* period remains. */
portNVIC_SYSTICK_LOAD_REG = ( ( ulCompleteTickPeriods + 1UL ) * ulTimerCountsForOneTick ) - ulCompletedSysTickDecrements;
}
/* Restart SysTick so it runs from portNVIC_SYSTICK_LOAD_REG
* again, then set portNVIC_SYSTICK_LOAD_REG back to its standard
* value. */
portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
portNVIC_SYSTICK_CTRL_REG |= portNVIC_SYSTICK_ENABLE_BIT;
vTaskStepTick( ulCompleteTickPeriods );
portNVIC_SYSTICK_LOAD_REG = ulTimerCountsForOneTick - 1UL;
/* Exit with interrupts enabled. */
__asm volatile ( "cpsie i" ::: "memory" );
}
}
#endif /* configUSE_TICKLESS_IDLE */
/*-----------------------------------------------------------*/
/*
* Setup the systick timer to generate the tick interrupts at the required
* frequency.
*/
__attribute__( ( weak ) ) void vPortSetupTimerInterrupt( void )
{
/* Calculate the constants required to configure the tick interrupt. */
#if ( configUSE_TICKLESS_IDLE == 1 )
{
ulTimerCountsForOneTick = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ );
xMaximumPossibleSuppressedTicks = portMAX_24_BIT_NUMBER / ulTimerCountsForOneTick;
ulStoppedTimerCompensation = portMISSED_COUNTS_FACTOR / ( configCPU_CLOCK_HZ / configSYSTICK_CLOCK_HZ );
}
#endif /* configUSE_TICKLESS_IDLE */
/* Stop and clear the SysTick. */
portNVIC_SYSTICK_CTRL_REG = 0UL;
portNVIC_SYSTICK_CURRENT_VALUE_REG = 0UL;
/* Configure SysTick to interrupt at the requested rate. */
portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL;
portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT | portNVIC_SYSTICK_ENABLE_BIT );
}
/*-----------------------------------------------------------*/
#if ( configASSERT_DEFINED == 1 )
void vPortValidateInterruptPriority( void )
{
uint32_t ulCurrentInterrupt;
uint8_t ucCurrentPriority;
/* Obtain the number of the currently executing interrupt. */
__asm volatile ( "mrs %0, ipsr" : "=r" ( ulCurrentInterrupt )::"memory" );
/* Is the interrupt number a user defined interrupt? */
if( ulCurrentInterrupt >= portFIRST_USER_INTERRUPT_NUMBER )
{
/* Look up the interrupt's priority. */
ucCurrentPriority = pcInterruptPriorityRegisters[ ulCurrentInterrupt ];
/* The following assertion will fail if a service routine (ISR) for
* an interrupt that has been assigned a priority above
* configMAX_SYSCALL_INTERRUPT_PRIORITY calls an ISR safe FreeRTOS API
* function. ISR safe FreeRTOS API functions must *only* be called
* from interrupts that have been assigned a priority at or below
* configMAX_SYSCALL_INTERRUPT_PRIORITY.
*
* Numerically low interrupt priority numbers represent logically high
* interrupt priorities, therefore the priority of the interrupt must
* be set to a value equal to or numerically *higher* than
* configMAX_SYSCALL_INTERRUPT_PRIORITY.
*
* Interrupts that use the FreeRTOS API must not be left at their
* default priority of zero as that is the highest possible priority,
* which is guaranteed to be above configMAX_SYSCALL_INTERRUPT_PRIORITY,
* and therefore also guaranteed to be invalid.
*
* FreeRTOS maintains separate thread and ISR API functions to ensure
* interrupt entry is as fast and simple as possible.
*
* The following links provide detailed information:
* https://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html
* https://www.FreeRTOS.org/FAQHelp.html */
configASSERT( ucCurrentPriority >= ucMaxSysCallPriority );
}
/* Priority grouping: The interrupt controller (NVIC) allows the bits
* that define each interrupt's priority to be split between bits that
* define the interrupt's pre-emption priority bits and bits that define
* the interrupt's sub-priority. For simplicity all bits must be defined
* to be pre-emption priority bits. The following assertion will fail if
* this is not the case (if some bits represent a sub-priority).
*
* If the application only uses CMSIS libraries for interrupt
* configuration then the correct setting can be achieved on all Cortex-M
* devices by calling NVIC_SetPriorityGrouping( 0 ); before starting the
* scheduler. Note however that some vendor specific peripheral libraries
* assume a non-zero priority group setting, in which cases using a value
* of zero will result in unpredictable behaviour. */
configASSERT( ( portAIRCR_REG & portPRIORITY_GROUP_MASK ) <= ulMaxPRIGROUPValue );
}
#endif /* configASSERT_DEFINED */
如下代码替换portmacro.h文件
/*
* FreeRTOS Kernel V10.4.1
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* https://www.FreeRTOS.org
* https://github.com/FreeRTOS
*
* 1 tab == 4 spaces!
*/
#ifndef PORTMACRO_H
#define PORTMACRO_H
#ifdef __cplusplus
extern "C" {
#endif
/*-----------------------------------------------------------
* Port specific definitions.
*
* The settings in this file configure FreeRTOS correctly for the
* given hardware and compiler.
*
* These settings should not be altered.
*-----------------------------------------------------------
*/
/* Type definitions. */
#define portCHAR char
#define portFLOAT float
#define portDOUBLE double
#define portLONG long
#define portSHORT short
#define portSTACK_TYPE uint32_t
#define portBASE_TYPE long
typedef portSTACK_TYPE StackType_t;
typedef long BaseType_t;
typedef unsigned long UBaseType_t;
#if ( configUSE_16_BIT_TICKS == 1 )
typedef uint16_t TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffff
#else
typedef uint32_t TickType_t;
#define portMAX_DELAY ( TickType_t ) 0xffffffffUL
/* 32-bit tick type on a 32-bit architecture, so reads of the tick count do
* not need to be guarded with a critical section. */
#define portTICK_TYPE_IS_ATOMIC 1
#endif
/*-----------------------------------------------------------*/
/* Architecture specifics. */
#define portSTACK_GROWTH ( -1 )
#define portTICK_PERIOD_MS ( ( TickType_t ) 1000 / configTICK_RATE_HZ )
#define portBYTE_ALIGNMENT 8
#define portDONT_DISCARD __attribute__( ( used ) )
/*-----------------------------------------------------------*/
/* Scheduler utilities. */
#define portYIELD() \
{ \
/* Set a PendSV to request a context switch. */ \
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; \
\
/* Barriers are normally not required but do ensure the code is completely \
* within the specified behaviour for the architecture. */ \
__asm volatile ( "dsb" ::: "memory" ); \
__asm volatile ( "isb" ); \
}
#define portNVIC_INT_CTRL_REG ( *( ( volatile uint32_t * ) 0xe000ed04 ) )
#define portNVIC_PENDSVSET_BIT ( 1UL << 28UL )
#define portEND_SWITCHING_ISR( xSwitchRequired ) if( xSwitchRequired != pdFALSE ) portYIELD()
#define portYIELD_FROM_ISR( x ) portEND_SWITCHING_ISR( x )
/*-----------------------------------------------------------*/
/* Critical section management. */
extern void vPortEnterCritical( void );
extern void vPortExitCritical( void );
#define portSET_INTERRUPT_MASK_FROM_ISR() ulPortRaiseBASEPRI()
#define portCLEAR_INTERRUPT_MASK_FROM_ISR( x ) vPortSetBASEPRI( x )
#define portDISABLE_INTERRUPTS() vPortRaiseBASEPRI()
#define portENABLE_INTERRUPTS() vPortSetBASEPRI( 0 )
#define portENTER_CRITICAL() vPortEnterCritical()
#define portEXIT_CRITICAL() vPortExitCritical()
/*-----------------------------------------------------------*/
/* Task function macros as described on the FreeRTOS.org WEB site. These are
* not necessary for to use this port. They are defined so the common demo files
* (which build with all the ports) will build. */
#define portTASK_FUNCTION_PROTO( vFunction, pvParameters ) void vFunction( void * pvParameters )
#define portTASK_FUNCTION( vFunction, pvParameters ) void vFunction( void * pvParameters )
/*-----------------------------------------------------------*/
/* Tickless idle/low power functionality. */
#ifndef portSUPPRESS_TICKS_AND_SLEEP
extern void vPortSuppressTicksAndSleep( TickType_t xExpectedIdleTime );
#define portSUPPRESS_TICKS_AND_SLEEP( xExpectedIdleTime ) vPortSuppressTicksAndSleep( xExpectedIdleTime )
#endif
/*-----------------------------------------------------------*/
/* Architecture specific optimisations. */
#ifndef configUSE_PORT_OPTIMISED_TASK_SELECTION
#define configUSE_PORT_OPTIMISED_TASK_SELECTION 1
#endif
#if configUSE_PORT_OPTIMISED_TASK_SELECTION == 1
/* Generic helper function. */
__attribute__( ( always_inline ) ) static inline uint8_t ucPortCountLeadingZeros( uint32_t ulBitmap )
{
uint8_t ucReturn;
__asm volatile ( "clz %0, %1" : "=r" ( ucReturn ) : "r" ( ulBitmap ) : "memory" );
return ucReturn;
}
/* Check the configuration. */
#if ( configMAX_PRIORITIES > 32 )
#error configUSE_PORT_OPTIMISED_TASK_SELECTION can only be set to 1 when configMAX_PRIORITIES is less than or equal to 32. It is very rare that a system requires more than 10 to 15 difference priorities as tasks that share a priority will time slice.
#endif
/* Store/clear the ready priorities in a bit map. */
#define portRECORD_READY_PRIORITY( uxPriority, uxReadyPriorities ) ( uxReadyPriorities ) |= ( 1UL << ( uxPriority ) )
#define portRESET_READY_PRIORITY( uxPriority, uxReadyPriorities ) ( uxReadyPriorities ) &= ~( 1UL << ( uxPriority ) )
/*-----------------------------------------------------------*/
#define portGET_HIGHEST_PRIORITY( uxTopPriority, uxReadyPriorities ) uxTopPriority = ( 31UL - ( uint32_t ) ucPortCountLeadingZeros( ( uxReadyPriorities ) ) )
#endif /* configUSE_PORT_OPTIMISED_TASK_SELECTION */
/*-----------------------------------------------------------*/
#ifdef configASSERT
void vPortValidateInterruptPriority( void );
#define portASSERT_IF_INTERRUPT_PRIORITY_INVALID() vPortValidateInterruptPriority()
#endif
/* portNOP() is not required by this port. */
#define portNOP()
#define portINLINE __inline
#ifndef portFORCE_INLINE
#define portFORCE_INLINE inline __attribute__( ( always_inline ) )
#endif
/*-----------------------------------------------------------*/
portFORCE_INLINE static BaseType_t xPortIsInsideInterrupt( void )
{
uint32_t ulCurrentInterrupt;
BaseType_t xReturn;
/* Obtain the number of the currently executing interrupt. */
__asm volatile ( "mrs %0, ipsr" : "=r" ( ulCurrentInterrupt )::"memory" );
if( ulCurrentInterrupt == 0 )
{
xReturn = pdFALSE;
}
else
{
xReturn = pdTRUE;
}
return xReturn;
}
/*-----------------------------------------------------------*/
portFORCE_INLINE static void vPortRaiseBASEPRI( void )
{
uint32_t ulNewBASEPRI;
__asm volatile
(
" mov %0, %1 \n"\
" msr basepri, %0 \n"\
" isb \n"\
" dsb \n"\
: "=r" ( ulNewBASEPRI ) : "i" ( configMAX_SYSCALL_INTERRUPT_PRIORITY ) : "memory"
);
}
/*-----------------------------------------------------------*/
portFORCE_INLINE static uint32_t ulPortRaiseBASEPRI( void )
{
uint32_t ulOriginalBASEPRI, ulNewBASEPRI;
__asm volatile
(
" mrs %0, basepri \n"\
" mov %1, %2 \n"\
" msr basepri, %1 \n"\
" isb \n"\
" dsb \n"\
: "=r" ( ulOriginalBASEPRI ), "=r" ( ulNewBASEPRI ) : "i" ( configMAX_SYSCALL_INTERRUPT_PRIORITY ) : "memory"
);
/* This return will not be reached but is necessary to prevent compiler
* warnings. */
return ulOriginalBASEPRI;
}
/*-----------------------------------------------------------*/
portFORCE_INLINE static void vPortSetBASEPRI( uint32_t ulNewMaskValue )
{
__asm volatile
(
" msr basepri, %0 "::"r" ( ulNewMaskValue ) : "memory"
);
}
/*-----------------------------------------------------------*/
#define portMEMORY_BARRIER() __asm volatile ( "" ::: "memory" )
#ifdef __cplusplus
}
#endif
#endif /* PORTMACRO_H */