单片机直驱两相四线步进电机研究
【本文发布于https://blog.csdn.net/Stack_/article/details/132236329,未经允许不得转载,转载须注明出处】
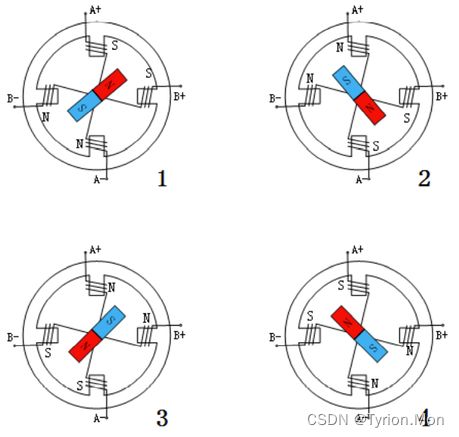
双极性步进电机(两相四线步进电机),原理的东西就先不讲太多了,还没搞清楚,边查资料边写代码来理解吧。
此电路使用4片CMS6324去驱动2个H桥,每片CMS6324驱动的桥的同一侧,其自带硬件死区,所以不需要考虑死区插入的问题。如果不是这样的电路,则需要注意上下桥臂同时导通短路的问题。
一、电机基本原理图 内部简化图

二、简单的驱动代码
#define MOTOR_A_P_PORT PORT1 //P15 A+
#define MOTOR_A_P_PIN PIN5
#define MOTOR_A_N_PORT PORT1 //P14 A-
#define MOTOR_A_N_PIN PIN4
#define MOTOR_B_P_PORT PORT1 //P13 B+
#define MOTOR_B_P_PIN PIN3
#define MOTOR_B_N_PORT PORT1 //P12 B-
#define MOTOR_B_N_PIN PIN2
#define MOTOR_A_P__SET() PORT_SetBit(MOTOR_A_P_PORT, MOTOR_A_P_PIN)
#define MOTOR_A_P__RESET() PORT_ClrBit(MOTOR_A_P_PORT, MOTOR_A_P_PIN)
#define MOTOR_A_N__SET() PORT_SetBit(MOTOR_A_N_PORT, MOTOR_A_N_PIN)
#define MOTOR_A_N__RESET() PORT_ClrBit(MOTOR_A_N_PORT, MOTOR_A_N_PIN)
#define MOTOR_B_P__SET() PORT_SetBit(MOTOR_B_P_PORT, MOTOR_B_P_PIN)
#define MOTOR_B_P__RESET() PORT_ClrBit(MOTOR_B_P_PORT, MOTOR_B_P_PIN)
#define MOTOR_B_N__SET() PORT_SetBit(MOTOR_B_N_PORT, MOTOR_B_N_PIN)
#define MOTOR_B_N__RESET() PORT_ClrBit(MOTOR_B_N_PORT, MOTOR_B_N_PIN)
PORT_Init(MOTOR_A_P_PORT, MOTOR_A_P_PIN, OUTPUT); //P15 A+
PORT_Init(MOTOR_A_N_PORT, MOTOR_A_N_PIN, OUTPUT); //P14 A-
PORT_Init(MOTOR_B_P_PORT, MOTOR_B_P_PIN, OUTPUT); //P13 B+
PORT_Init(MOTOR_B_N_PORT, MOTOR_B_N_PIN, OUTPUT); //P12 B-
PORT_Init(PORT3, PIN0, OUTPUT); //P30 CMS6021 POWER_EN, 使能CMS6324供电
PORT_SetBit(PORT3, PIN0);
while(1)
{
#if (0) //四拍
#if (0) //四拍正转
//A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
#else //四拍反转
//A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
#endif
#else //八拍
#if (0) //八拍正向
//A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A+ B+
MOTOR_A_P__SET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+ A-
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A- B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B- A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
#else //八拍反向
//A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B- A+
MOTOR_A_P__SET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__RESET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A- B-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__SET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A-
MOTOR_A_P__RESET();
MOTOR_B_P__RESET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+ A-
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__SET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//B+
MOTOR_A_P__RESET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
//A+ B+
MOTOR_A_P__SET();
MOTOR_B_P__SET();
MOTOR_A_N__RESET();
MOTOR_B_N__RESET();
UserTimer_Reset(&timer_delay);
while(UserTimer_Read(&timer_delay) < TIMEOUT_1MS);
#endif
#endif
}
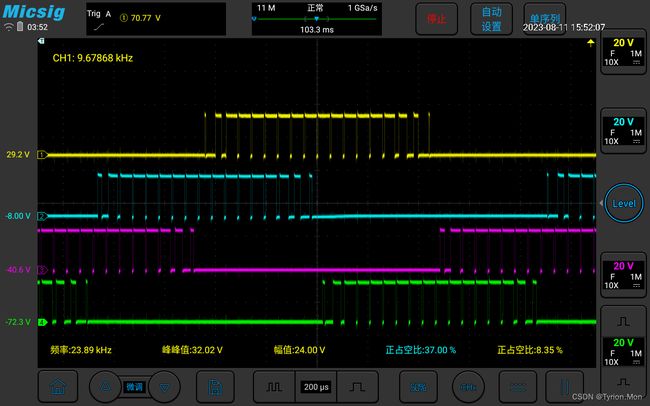
| 黄波形为 A+ |
| 蓝波形为 B+ |
| 紫波形为 A- |
| 绿波形为 B- |
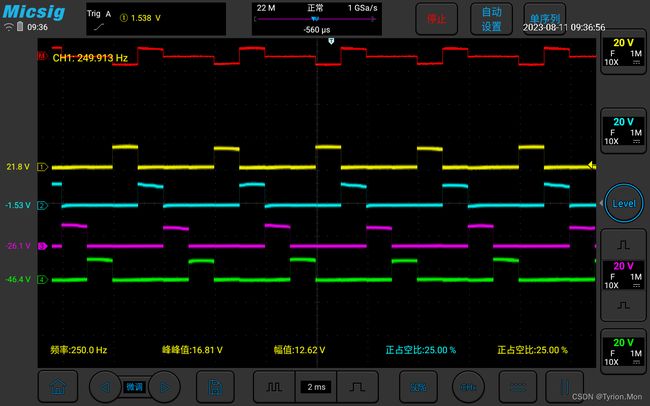
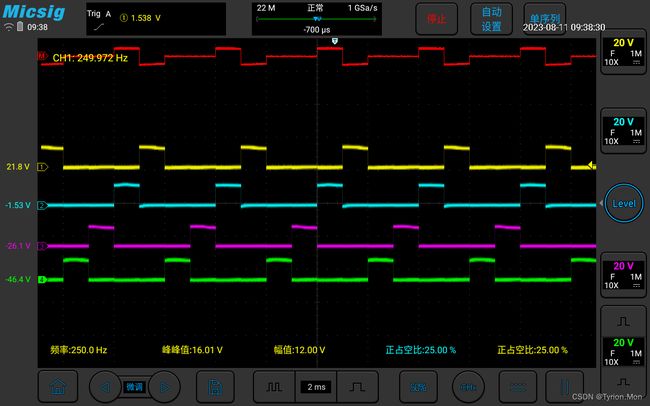


三、抓取步进电机驱动芯片/驱动器的四线波形进行对比



以上为波形研究,待续