Mathematica 与 Matlab 常见复杂指令集汇编
- Mathematica 常见指令汇编
Mathematica 常见指令
NDSolve 求解结果的保存
sol = NDSolve[{y'[x] == x^2, y[0] == 0, g'[x] == -y[x]^2,
g[0] == 1}, {y, g}, {x, 0, 1}];
numericSoly = sol[[1, 1, 2]];
numericSolg = sol[[1, 2, 2]];
data = Table[{x, numericSoly[x], numericSolg[x]}, {x, 0, 1, 0.01}];
dataset = Dataset[AssociationThread[{"x", "y", "g"}, #] & /@ data];
Export["C:\\Users\\LX\\Desktop\\data.csv", dataset]
Plot[{numericSoly[x], numericSolg[x]}, {x, 0, 1}]![]()
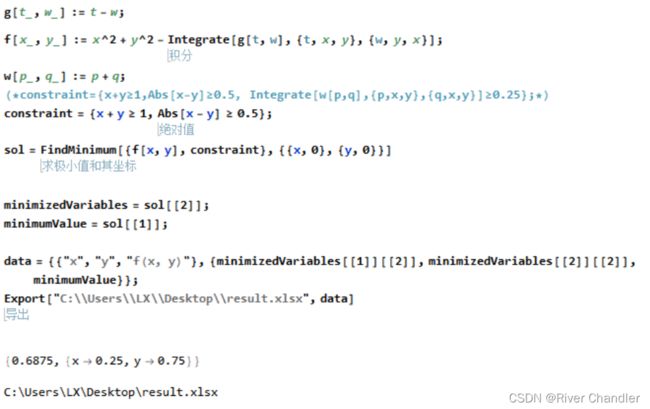
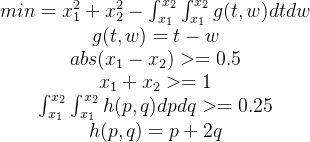
FindMinimum 求解结果的保存
f[x_, y_] := x^2 + y^2;
constraint = {x + y >= 1, Abs[x - y] >= 0.5};
sol = FindMinimum[{f[x, y], constraint}, {{x, 0}, {y, 0}}]
minimizedVariables = sol[[2]];
minimumValue = sol[[1]];
data = {{"x", "y", "f(x, y)"}, {minimizedVariables[[1]][[2]],
minimizedVariables[[2]][[2]], minimumValue}};
Export["C:\\Users\\LX\\Desktop\\result.xlsx", data]![]()
![]()
FindMinimum 不支持在整数规划以外的不等约束与域约束
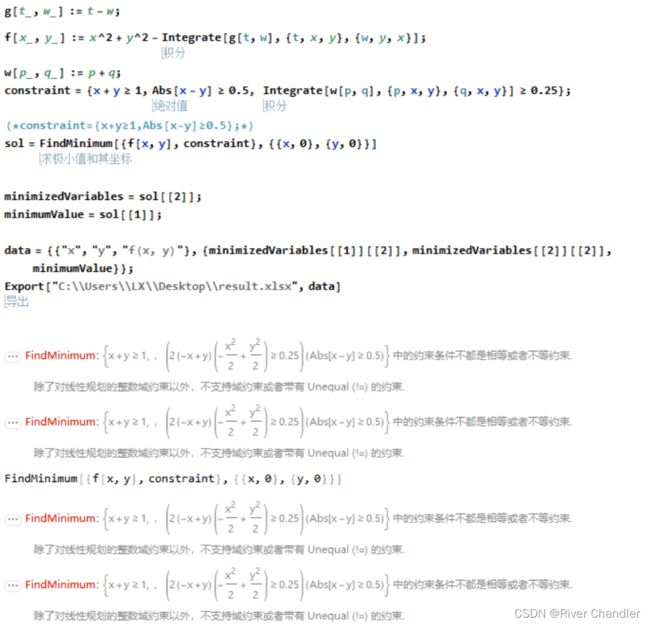
- 要解决这个问题,我们需要借助Matlab 的力量
Matlab 常见指令
odefun
g = @(t, w) t - w;
%f = @(x, y) x^2 + y^2 - integral2(@(t, w) g(t, w), x, y, y, x);
f = @(x) x(1)^2 + x(2)^2 - integral2(@(t, w) g(t, w), x(1), x(2), x(1), x(2));
nonlcon = @nonlinearConstraint;
A = [-1 -1;1 -1;1 -1];
b = [-1;-0.5;-0.5];
odefun = @(t, y) [-2*y(1) + y(2); y(1) - 2*y(2)];
tspan = [0 100];
y0 = [1; 0];
[t, y] = ode45(odefun, tspan, y0);
%plot(t, y(:, 1), 'r', t, y(:, 2), 'b');
%legend('y_1', 'y_2')
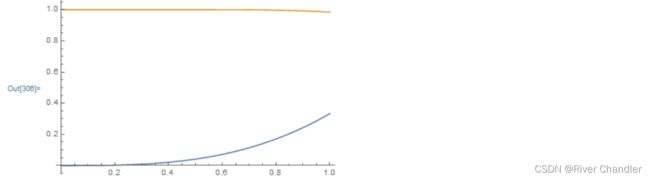
plot(y(:, 1), y(:, 2))
xlabel('y1')
ylabel('y2')
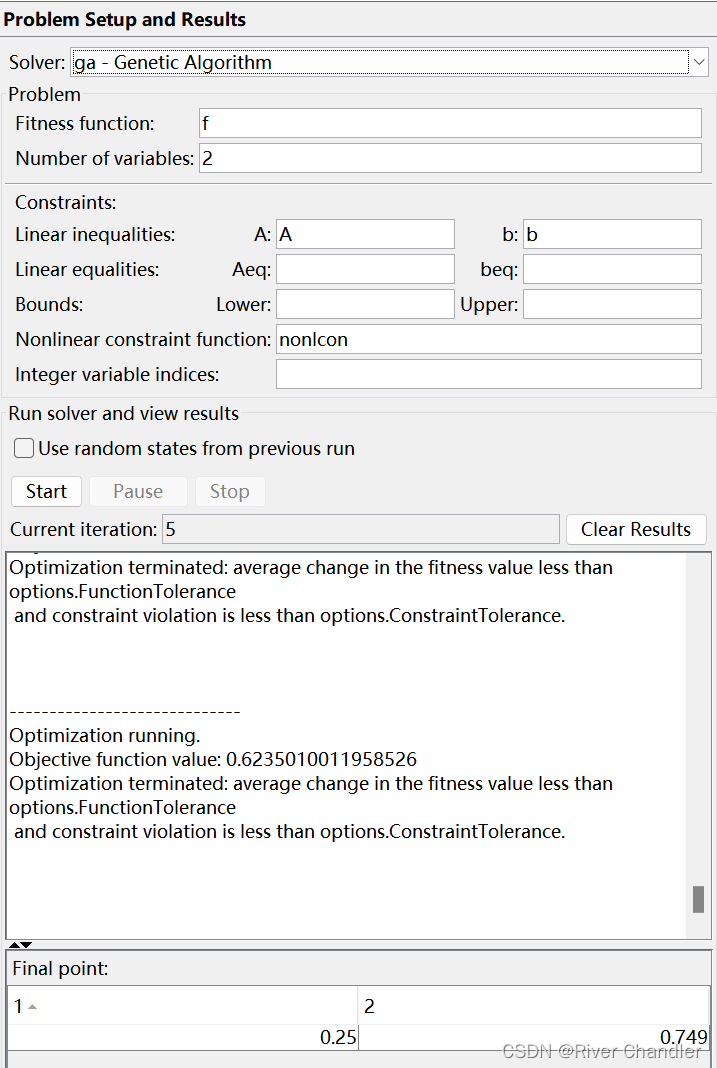
Optimization tools 的 matlab 替代
- 针对FindMinimum 不支持在整数规划以外的不等约束与域约束
- 问题
Untitled.m
g = @(t, w) t - w;
%f = @(x, y) x^2 + y^2 - integral2(@(t, w) g(t, w), x, y, y, x);
f = @(x) x(1)^2 + x(2)^2 - integral2(@(t, w) g(t, w), x(1), x(2), x(1), x(2));
nonlcon = @nonlinearConstraint;
A = [-1 -1;1 -1;1 -1];
b = [-1;-0.5;-0.5];
nonlinearConstraint.m
function [c, ceq] = nonlinearConstraint(x)
h = @(p, q) p + 2 * q;
%k = @(x) integral2(@(p, q) h(p, q), x(1), x(2), x(1), x(2))-0.25;
c = [0.25 - integral2(@(p, q) h(p, q), x(1), x(2), x(1), x(2))];
ceq = [0];
end Optimizaation Tool