利用matlab实现一维搜索算法
通过五种方法实现全局极小值点的求解。其中,“成功-失败法”是试探法;区间收缩法,包括二分法、0.618法;函数逼近法,包括Newton法、二次插值法。
1.“成功-失败”法,又称进退法
function [k,interval] = forward_back(fx,x0,h0,t)
% 输入目标函数fx、初始点x0、初始步长h0和加倍系数t
% 退出条件:当k不等于1且f(x1) >= f(x0)时,程序结束
% 采用"进退法"确定并输出得到的最小搜索区间[m,n]
f = inline(fx); % 将 fx字符串 转换为 函数f(x)
k = 0; % 迭代次数(如果第1次目标函数就没有下降,将作为反向搜索)
a = x0; % 初始化最值区间的左端点
h = h0; % 初始化迭代的步长
while true
x1 = x0 + h;
k = k + 1;
if f(x1) < f(x0) % 判断搜索方向,保证是下降方向
h = t * h; % 加大步长,一般情况下选择加倍系数t = 2
a = x0; % 更新最值区间的左端
x0 = x1; % 更新初始点
elseif f(x1) >= f(x0)
if k == 1 % 判断初始方向是否错误
h = -h; % 方向错误,选择反方向
x0 = x1; % 更新初始点
else
break;
end
end
end
m = min(a,x1);
n = max(a,x1);
interval = sprintf('[%.4f,%.4f]',m,n); % 格式化输出区间
end 
注意:关于变量没有定义的问题:要在MATLAB中将函数存入.m文件再在命令窗口调用(文件与函数同名);调用函数前,在命令行窗口定义变量syms x,即如下图:

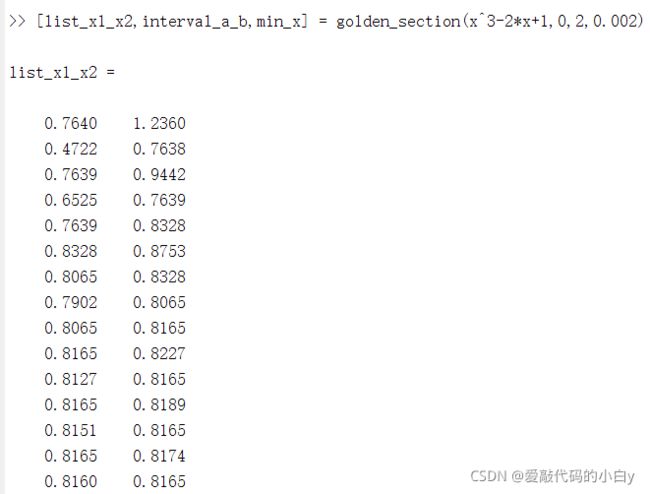
2.黄金分割法,又称0.618法
function [list_x1_x2,interval_a_b,min_x] = golden_section(fx,a,b,accuracy)
% 输入目标函数fx、初始区间的端点a、b和精确度accuracy
% 0.618法则,又称黄金分割法,是一种区间缩减的方法
% 缩减区间的原则:去坏留好
% 迭代时,遵循对称原则 (x1-a=b-x2) ,并保持缩减比t不变
% 当最终区间长度b-a小于或者等于accuracy时,迭代退出
format short % 输出为小数
t = 0.618; % 缩减比
x1 = a + (1-t)*(b-a);
x2 = a + t*(b-a);
f = inline(fx); % 将 fx字符串 转换为 函数法f(x)
list_x1 = [];
list_x2 = [];
list_x1_x2 = [];
interval_a = [];
interval_b = [];
interval_a_b = [];
while (b-a) > accuracy
list_x1(end+1) = x1; % 每次迭代中使用的x1
list_x2(end+1) = x2; % 每次迭代中使用的x2
if f(x1) > f(x2)
a = x1;
x1 = a + (1-t)*(b-a);
x2 = a + t*(b-a);
else
b = x2;
x1 = a + (1-t)*(b-a);
x2 = a + t*(b-a);
end
interval_a(end+1) = a;
interval_b(end+1) = b;
end
min_x = (a+b)/2;
list_x1_x2 = [list_x1;list_x2]';
interval_a_b = [interval_a;interval_b]';
end

3.二分法
function [list_min_x,interval_a_b,min_x] = half_section(fx,a,b,accuracy)
% 输入目标函数fx、初始区间的端点a、b和精确度accuracy
% 二分法求极小值
% 如果f'(a)*f'(b)<0,则定义域内一定存在min_x,使得f'(min_x)=0
% 当最终区间长度b-a小于或者等于accuracy时,迭代退出
format rat % 将小数化为分数
syms x dy % syms的作用是定义符号变量
list_min_x = [];
interval_a = [];
interval_b = [];
interval_a_b = [];
dy = inline(diff(fx,x)); % inline为内联函数;diff求一阶导数
while (b-a) > accuracy
if ((dy(a)*dy(b)) < 0)
x0 = (a+b)/2;
list_min_x(end+1) = x0;
if (dy(a)*dy(x0)) < 0
b = x0;
elseif (dy(x0)*dy(b)) < 0
a = x0;
end
interval_a(end+1) = a;
interval_b(end+1) = b;
else
disp("请改变区间的端点");
break;
end
end
list_min_x = list_min_x';
interval_a_b = [interval_a;interval_b]';
min_x = list_min_x(length(list_min_x));
end>> [list_min_x,interval_a_b,min_x] = half_section(x^3-2*x+1,0,2,0.004)
list_min_x =
1
1/2
3/4
7/8
13/16
27/32
53/64
105/128
209/256
interval_a_b =
0 1
1/2 1
3/4 1
3/4 7/8
13/16 7/8
13/16 27/32
13/16 53/64
13/16 105/128
209/256 105/128
min_x =
209/256
4.Newton法
function [list_x,min_x] = Newton(fx,x1,error)
syms x dy ddy
format short
f = inline(fx); % 将 fx字符串 转换为 函数法f(x)
dy = inline(diff(fx,x)); % inline为内联函数;diff求一阶导数
ddy = inline(diff(diff(fx,x),x));
list_x = [];
while not (dy(x1)[min_x,list_x,ddy] = Newton(x^4-4*x^3-6*x^2-16*x+4, 6,0.01)
min_x =
4.0105
list_x =
6.0000 4.7536 4.1645 4.0105
5.二次插值法
function [min_x,list_min_x] = Quadratic_Interpolation(fx,x0,h,t,error)
format short
syms x
f = inline(fx);
list_min_x = [];
% 用成功-失败法,即forward_back,得到“高-低-高”三点
[~,list_x0,~,m,n] = forward_back(fx, x0, h, t);
x1 = m;
x2 = list_x0(length(list_x0));
x3 = n;
% 用二次插值法逼近极小点
x = [x1,x2,x3];
y = [f(x1),f(x2),f(x3)];
p = polyfit(x,y,2); % 多项式拟合函数,返回降幂排列的多项式系数
min_x = -p(2)/(2*p(1));
list_min_x(end+1) = min_x;
while not (abs(min_x-x2)[min_x,list_min_x] = Quadratic_Interpolation(3*x^3-4*x+2,-1/2,1/2,2,0.2)
min_x =
0.6081
list_min_x =
0.5417 0.6081