FreeRTOS(4):软件定时器、中断管理
目录
一、延时函数
延时函数分类
vTaskDelay 与 HAL_Delay 的区别
二、软件定时器
什么是定时器?
软件定时器优缺点
软件定时器原理
软件定时器相关配置
单次定时器和周期定时器
1. 创建软件定时器
2. 开启软件定时器
3. 停止软件定时器
4. 复位软件定时器
5. 更改软件定时器定时时间
实操
实验需求
cubeMX配置
代码实现
三、中断管理
中断定义
中断优先级
相关注意
实操
实验需求
cubeMX配置
代码实现
一、延时函数
延时函数分类
相对延时:vTaskDelay
绝对延时:vTaskDelayUntil
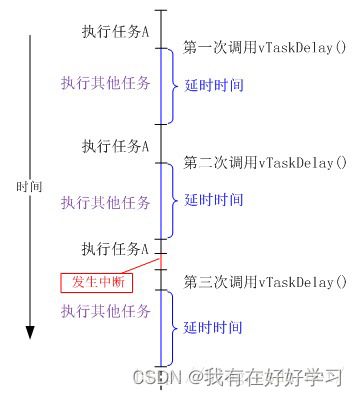

vTaskDelay 与 HAL_Delay 的区别
vTaskDelay 作用是让任务阻塞,任务阻塞后,RTOS系统调用其它处于就绪状态的优先级最高的任务来执行。
HAL_Delay 一直不停的调用获取系统时间的函数,直到指定的时间流逝然后退出,故其占用了全部CPU时间。
二、软件定时器
什么是定时器?
简单可以理解为闹钟,到达指定一段时间后,就会响铃。
STM32 芯片自带硬件定时器,精度较高,达到定时时间后会触发中断,也可以生成 PWM 、输入捕获、输出比较,等等,功能强大,但是由于硬件的限制,个数有限。
软件定时器也可以实现定时功能,达到定时时间后可调用回调函数,可以在回调函数里处理信息。
软件定时器优缺点
优点:
1. 简单、成本低;
2. 只要内存足够,可创建多个;
缺点:
精度较低,容易受中断影响。在大多数情况下够用,但对于精度要求比较高的场合不建议使用。
软件定时器原理
定时器是一个可选的、不属于 FreeRTOS 内核的功能,它是由定时器服务任务来提供的。
在调用函数 vTaskStartScheduler() 开启任务调度器的时候,会创建一个用于管理软件定时器的任务,这个任务就叫做软件定时器服务任务。
1. 负责软件定时器超时的逻辑判断
2. 调用超时软件定时器的超时回调函数
3. 处理软件定时器命令队列
FreeRTOS提供了很多定时器有关的API函数,这些API函数大多都使用FreeRTOS的队列发送命令给定时器服务任务。这个队列叫做定时器命令队列。定时器命令队列是提供给FreeRTOS的软件定时器使用的,用户不能直接访问!

软件定时器相关配置
软件定时器有一个定时器服务任务和定时器命令队列,这两个东西肯定是要配置的,相关的配置也是放到文件FreeRTOSConfig.h中的,涉及到的配置如下:
1、configUSE_TIMERS
如果要使用软件定时器的话宏configUSE_TIMERS一定要设置为1,当设置为1的话定时器服务任务就会在启动FreeRTOS调度器的时候自动创建。
2、configTIMER_TASK_PRIORITY
设置软件定时器服务任务的任务优先级,可以为0~(configMAX_PRIORITIES-1)。优先级一定要根据实际的应用要求来设置。如果定时器服务任务的优先级设置的高的话,定时器命令队列中的命令和定时器回调函数就会及时的得到处理。
3、configTIMER_QUEUE_LENGTH
此宏用来设置定时器命令队列的队列长度。
4、configTIMER_TASK_STACK_DEPTH
此宏用来设置定时器服务任务的任务堆栈大小。
单次定时器和周期定时器
单次定时器: 只超时一次,调用一次回调函数。可手动再开启定时器;
周期定时器: 多次超时,多次调用回调函数。
软件定时器相关 API 函数
| 函数 | 描述 |
| xTimerCreate() | 动态方式创建软件定时器 |
| xTimerCreateStatic() | 静态方式创建软件定时器 |
| xTimerStart() | 开启软件定时器定时 |
| xTimerStop() | 停止软件定时器定时 |
| xTimerReset() | 复位软件定时器定时 |
| xTimerChangePeriod() | 更改软件定时器的定时超时时间 |
| xTimerStartFromISR() | 在中断中开启软件定时器定时 |
| xTimerStopFromISR() | 在中断中停止软件定时器定时 |
| xTimerResetFromISR() | 在中断中复位软件定时器定时 |
| xTimerChangePeriodFromISR() | 在中断中更改定时超时时间 |
1. 创建软件定时器
TimerHandle_t xTimerCreate
( const char * const pcTimerName,
const TickType_t xTimerPeriod,
const UBaseType_t uxAutoReload,
void * const pvTimerID,
TimerCallbackFunction_t pxCallbackFunction );参数:
pcTimerName:软件定时器名称
xTimerPeriodInTicks:定时超时时间,单位:系统时钟节拍。
宏pdMS_TO_TICKS() 可用于将以毫秒为单位指定的时间转换为以 tick 为单位指定的时间。
uxAutoReload:定时器模式, pdTRUE:周期定时器, pdFALSE:单次定时器
pvTimerID:软件定时器 ID,用于多个软件定时器公用一个超时回调函数
pxCallbackFunction:软件定时器超时回调函数
返回值:
成功:定时器句柄
失败:NULL
2. 开启软件定时器
BaseType_t xTimerStart( TimerHandle_t xTimer,TickType_t xBlockTime );参数:
xTimer:待开启的软件定时器的句柄
xTickToWait:发送命令到软件定时器命令队列的最大等待时间
返回值:
pdPASS:开启成功
pdFAIL:开启失败
3. 停止软件定时器
BaseType_t xTimerStop( TimerHandle_t xTimer,TickType_t xBlockTime );参数与返回值同上。
4. 复位软件定时器
BaseType_t xTimerReset( TimerHandle_t xTimer,TickType_t xBlockTime );参数与返回值同上。
该功能将使软件定时器的重新开启定时,复位后的软件定时器以复位时的时刻作为开启时刻重新
定时。
5. 更改软件定时器定时时间
BaseType_t xTimerChangePeriod( TimerHandle_t xTimer,
TickType_t xNewPeriod,
TickType_t xBlockTime );xNewPeriod:新的定时超时时间,单位:系统时钟节拍。
其余参数与返回值同上。
实操
实验需求
创建两个定时器:
定时器1,周期定时器,每1秒打印一次 liangxu shuai
定时器2,单次定时器,启动后 2 秒打印一次 laochen shuai
cubeMX配置

周期定时器
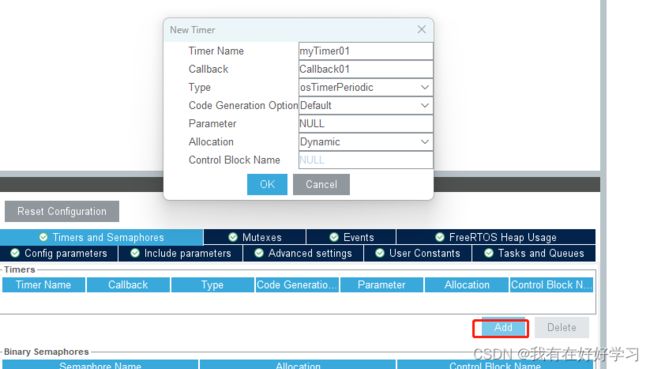 单次定时器
单次定时器

自动生成两个回调函数

代码实现

//两种都可以
osTimerStart(myTimer01Handle,1000);
xTimerChangePeriod(myTimer01Handle,pdMS_TO_TICKS(1000),0); void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
osTimerStart(myTimer01Handle,1000);
osTimerStart(myTimer02Handle,2000);
/* Infinite loop */
for(;;)
{
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* Callback01 function */
void Callback01(void const * argument)
{
/* USER CODE BEGIN Callback01 */
printf("111111111\r\n");
/* USER CODE END Callback01 */
}
/* Callback02 function */
void Callback02(void const * argument)
{
/* USER CODE BEGIN Callback02 */
printf("22222222\r\n");
/* USER CODE END Callback02 */
}三、中断管理
中断定义
请参考 51 及 STM32 中断相关课程。
中断优先级
任何中断的优先级都大于任务!
在我们的操作系统,中断同样是具有优先级的,并且我们也可以设置它的优先级,但是他的优先级并不是从 0~15 ,默认情况下它是从 5~15 ,0~4 这 5 个中断优先级不是 FreeRTOS 控制的(5是取决于 configMAX_SYSCALL_INTERRUPT_PRIORITY)。
相关注意
1. 在中断中必需使用中断相关的函数;
2. 中断服务函数运行时间越短越好。
实操
实验需求
创建一个队列及一个任务,按下按键 KEY1 触发中断,在中断服务函数里向队列里发送数据,任务则阻塞接收队列数据。
cubeMX配置

代码实现



stm32f1xx_it.c
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "cmsis_os.h"
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
extern osMessageQId myQueue01Handle;
/* USER CODE END PV */
/* USER CODE BEGIN 1 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
static uint32_t snd = 1;
xQueueSendFromISR(myQueue01Handle,&snd,NULL);
}
/* USER CODE END 1 */freertos.c
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
static uint32_t rev = 0;
/* Infinite loop */
for(;;)
{
if(xQueueReceive(myQueue01Handle,&rev,portMAX_DELAY) == pdTRUE)
{
printf("rev = %d \r\n",rev);
}
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}