基于STM32CUBEMX驱动TMOS模块STHS34PF80(2)----驱动STHS34PF80进行人体检测
基于STM32CUBEMX驱动TMOS模块STHS34PF80----2.驱动STHS34PF80进行人体检测
- 概述
- 样品申请
- 视频教程
- 完整代码下载
- 参考Demo
- 引导
- 温度测量滤波方式
- 智能识别算法
- 使用块数据更新(BDU)功能
- 设置ODR速率
- 状态寄存器
- main.c
概述
STHS34PF80 是一款非冷却、工厂校准的红外运动和存在检测传感器,工作波长在 5 µm 至 20 µm 之间。STHS34PF80 传感器设计用于测量视野内物体发出的红外辐射量。该信息由 ASIC 进行数字处理,可以对其进行编程以监控运动、存在或过热状况。
本章主要驱动STHS34PF80,进行人体检测。
最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:6_15061293 。

样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
视频教程
https://www.bilibili.com/video/BV18z4y1g7BA/
基于STM32CUBEMX驱动TMOS模块STHS34PF80(2)----驱动STHS34PF80进行人体检测
完整代码下载
https://download.csdn.net/download/qq_24312945/88216813
参考Demo
https://github.com/STMicroelectronics/STMems_Standard_C_drivers/blob/master/sths34pf80_STdC/examples/sths34pf80_tmos_data_polling.c
引导
在设备上电后,它会执行一个2.5毫秒的引导过程,将校准系数从嵌入式闪存下载到内部寄存器,并加载AVG_TRIM(10h)、CTRL0(17h)和SENS_DATA(1Dh)寄存器的默认内容。在引导时间内,设备的寄存器不可访问。
引导完成后,设备会自动配置为电源关闭模式。
在上电后,可以通过将CTRL2(21h)寄存器的BOOT位设置为1,重新启动引导过程,以重新加载上述寄存器的默认值。不需要切换设备电源线。
在重新启动时间内,设备的寄存器不可访问。重新启动完成后,设备会自动配置为之前的操作模式,并且BOOT位会自动清除为0。

温度测量滤波方式
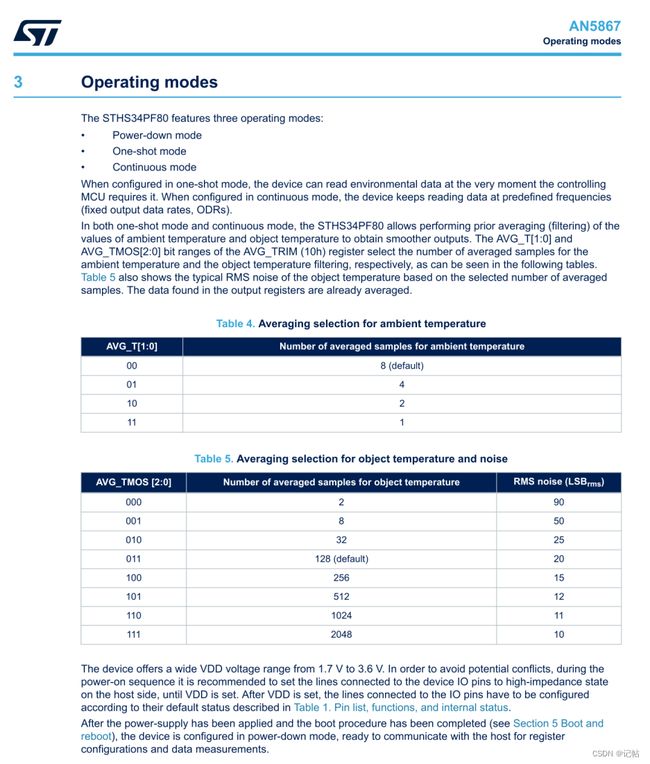
首先需要设置AVG_TRIM (10h) 寄存器用于配置温度平均值滤波的参数,以控制环境温度和目标温度测量的平滑度和稳定性。在温度测量中,可能会受到噪声和干扰的影响,这可能导致短期内测量值的波动。通过应用平均值滤波,可以平滑这些波动,从而得到更加稳定的温度数据。AVG_TRIM 寄存器中的设置会决定平均值滤波的级别,从而影响滤波的时间常数以及平滑度。
这里默认参数如下
- 在AVG_TRIM(10h)寄存器中写入02h // AVG_T = 8,AVG_TMOS = 32
- 在CTRL1(20h)寄存器中写入07h // ODR = 15 Hz

AVG_T[1:0]: 这个设置位用于选择环境温度的平均值滤波样本数。
AVG_TMOS[2:0]: 这个设置位用于选择目标温度的平均值滤波样本数以及与之相关的噪声水平。
参考demo中将AVG_TMOS [2:0] 和AVG_T[1:0] 分为了2个函数进行操作。

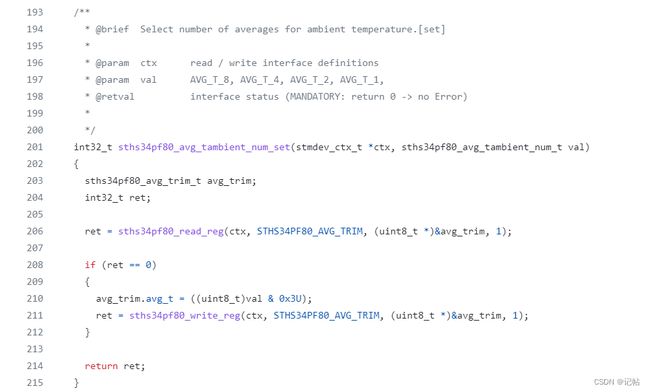

修改后操作如下所示。
/**
* @brief Select number of averages for object temperature.[set]
*
* @param ctx read / write interface definitions
* @param val AVG_TMOS_2, AVG_TMOS_8, AVG_TMOS_32, AVG_TMOS_128, AVG_TMOS_256, AVG_TMOS_512, AVG_TMOS_1024, AVG_TMOS_2048,
* @retval interface status (MANDATORY: return 0 -> no Error)
*
*/
uint8_t sths34pf80_avg_tobject_num_set(uint8_t add, sths34pf80_avg_tobject_num_t val)
{
sths34pf80_avg_trim_t avg_trim;
int32_t ret;
ret = sths34pf80_read_reg(add, STHS34PF80_AVG_TRIM, (uint8_t *)&avg_trim, 1);
if (ret == HAL_OK)
{
avg_trim.avg_tmos = ((uint8_t)val & 0x7U);
ret = sths34pf80_write_reg(add, STHS34PF80_AVG_TRIM, (uint8_t *)&avg_trim, 1);
}
return ret;
}
/**
* @brief Select number of averages for ambient temperature.[set]
*
* @param ctx read / write interface definitions
* @param val AVG_T_8, AVG_T_4, AVG_T_2, AVG_T_1,
* @retval interface status (MANDATORY: return 0 -> no Error)
*
*/
uint8_t sths34pf80_avg_tambient_num_set(uint8_t add, sths34pf80_avg_tambient_num_t val)
{
sths34pf80_avg_trim_t avg_trim;
int32_t ret;
ret = sths34pf80_read_reg(add, STHS34PF80_AVG_TRIM, (uint8_t *)&avg_trim, 1);
if (ret == HAL_OK)
{
avg_trim.avg_t = ((uint8_t)val & 0x3U);
ret = sths34pf80_write_reg(add, STHS34PF80_AVG_TRIM, (uint8_t *)&avg_trim, 1);
}
return ret;
}
使用如下所示,这里设置参数为STHS34PF80_AVG_TMOS_32和STHS34PF80_AVG_T_8。
/* Set averages (AVG_TAMB = 8, AVG_TMOS = 32) */
sths34pf80_avg_tobject_num_set(STHS34PF80_ADDRESS, STHS34PF80_AVG_TMOS_32);
sths34pf80_avg_tambient_num_set(STHS34PF80_ADDRESS, STHS34PF80_AVG_T_8);
智能识别算法
STHS34PF80嵌入了智能数字算法,以支持以下三种检测模式:
• 存在检测
• 运动检测
• 环境温度冲击检测
这些算法分别使用不同的低通滤波器(LPF_P、LPF_M和LPF_A_T)。此外,存在和运动检测算法使用另一个共同的低通滤波器(LPF_P_M)。这些滤波器用于生成中间信号(TPRESENCE、TMOTION和TAMB_SHOCK),可以用于对算法本身进行微调。这些滤波器的截止频率值可以通过它们各自的位范围进行配置,这些位范围可以在LPF1(0Ch)和LPF2(0Dh)寄存器中找到,如下所示。

寄存器LPF1 (0Ch)和LPF2 (0Dh)如下所示。

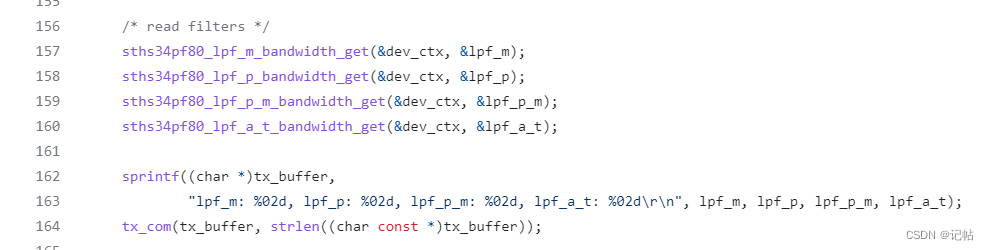
案例中只是对滤波器进行了读取以及打印。

修改后如下所示。
/* read filters */
sths34pf80_lpf_m_bandwidth_get(STHS34PF80_ADDRESS, &lpf_m);
sths34pf80_lpf_p_bandwidth_get(STHS34PF80_ADDRESS, &lpf_p);
sths34pf80_lpf_p_m_bandwidth_get(STHS34PF80_ADDRESS, &lpf_p_m);
sths34pf80_lpf_a_t_bandwidth_get(STHS34PF80_ADDRESS, &lpf_a_t);
printf("lpf_m: %02d, lpf_p: %02d, lpf_p_m: %02d, lpf_a_t: %02d\r\n", lpf_m, lpf_p, lpf_p_m, lpf_a_t);
使用块数据更新(BDU)功能
如果读取输出数据的时机与数据准备信号不同步,强烈建议在CTRL1(20h)寄存器中将BDU(块数据更新)位设置为1。
此功能可以避免读取与不同采样相关的寄存器值(输出数据的最高和最低字节)。
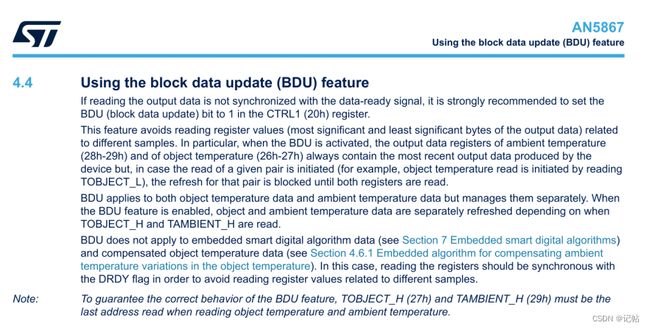
案例也是设置了BDU。

BDU在CTRL1 (20h)寄存器中。

修改后的操作如下所示。
/* Set BDU */
sths34pf80_block_data_update_set(STHS34PF80_ADDRESS, 1);
设置ODR速率
初始化完毕之后需要通过CTRL1(20h)寄存器中的ODR[3:0]位范围选择其中一种操作模式(连续模式),或者在CTRL2(21h)寄存器中将ONE_SHOT位设置为1(单次触发模式)。

当配置了寄存器LPF1 (0Ch)和LPF2 (0Dh) 的LPF_P、LPF_M和LPF_A_T、LPF_P_M滤波器之后,可以去设置ODR速率。

这里设置速率为30HZ。
/* Set ODR */
sths34pf80_tmos_odr_set(STHS34PF80_ADDRESS, STHS34PF80_TMOS_ODR_AT_30Hz);
状态寄存器
初始化完毕之后,可以通过状态寄存器STATUS (23h)获取DRDY标志位。数据就绪信号由STATUS寄存器的DRDY位表示。当新的数据可用时,此位被设置为1,并在读取FUNC_STATUS(25h)寄存器后被清除。
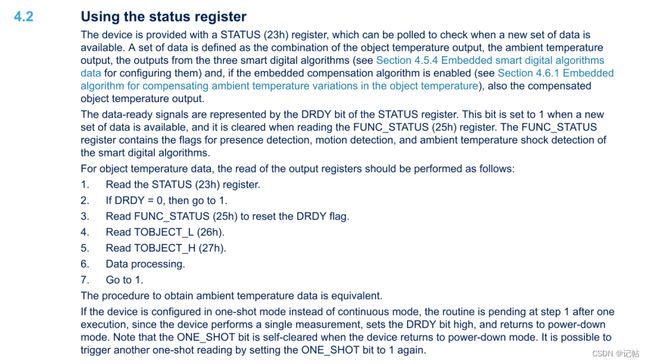
主程序中会去获取改状态位,若为1,则代表数据已经准备完毕,可以进行获取和打印。
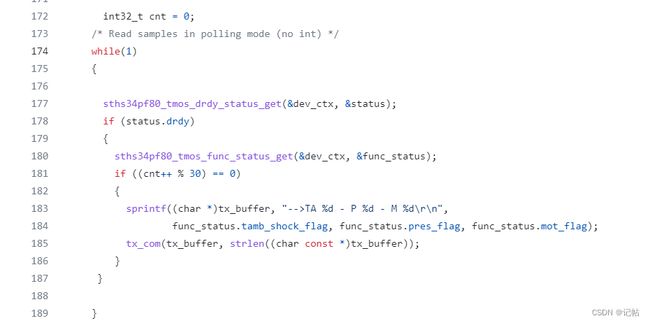
FUNC_STATUS(25h)主要检测三个标志位:PRES_FLAG、MOT_FLAG 和 TAMB_SHOCK_FLAG,这些标志位用于检测不同类型的事件。
PRES_FLAG是存在检测标志位。当存在检测到人员存在时,此位变为1。
MOT_FLAG:运动检测标志位。当检测到运动时,此位变为1。
TAMB_SHOCK_FLAG:环境温度冲击检测标志位。当检测到环境温度冲击时,此位变为1。

修改完毕主程序如下所示。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
sths34pf80_tmos_drdy_status_get(STHS34PF80_ADDRESS, &status);
if (status.drdy)
{
sths34pf80_tmos_func_status_get(STHS34PF80_ADDRESS, &func_status);
printf("-->环境温度冲击检测标志位 %d - 存在检测标志位 %d - 运动检测标志位 %d\r\n",func_status.tamb_shock_flag, func_status.pres_flag, func_status.mot_flag);
}
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
main.c
/* USER CODE BEGIN 2 */
sths34pf80_lpf_bandwidth_t lpf_m, lpf_p, lpf_p_m, lpf_a_t;
sths34pf80_tmos_drdy_status_t status;
sths34pf80_tmos_func_status_t func_status;
HAL_Delay(200);
printf("123");
uint8_t STHS34PF80_ID =STHS34PF80_getChipID(STHS34PF80_ADDRESS);
printf("STHS34PF80_ID=0x%x\n",STHS34PF80_ID);
if (STHS34PF80_ID != 0xD3)
while(1);
/* Set averages (AVG_TAMB = 8, AVG_TMOS = 32) */
sths34pf80_avg_tobject_num_set(STHS34PF80_ADDRESS, STHS34PF80_AVG_TMOS_2048);
sths34pf80_avg_tambient_num_set(STHS34PF80_ADDRESS, STHS34PF80_AVG_T_8);
/* read filters */
sths34pf80_lpf_m_bandwidth_get(STHS34PF80_ADDRESS, &lpf_m);
sths34pf80_lpf_p_bandwidth_get(STHS34PF80_ADDRESS, &lpf_p);
sths34pf80_lpf_p_m_bandwidth_get(STHS34PF80_ADDRESS, &lpf_p_m);
sths34pf80_lpf_a_t_bandwidth_get(STHS34PF80_ADDRESS, &lpf_a_t);
printf("lpf_m: %02d, lpf_p: %02d, lpf_p_m: %02d, lpf_a_t: %02d\r\n", lpf_m, lpf_p, lpf_p_m, lpf_a_t);
/* Set BDU */
sths34pf80_block_data_update_set(STHS34PF80_ADDRESS, 1);
/* Set ODR */
sths34pf80_tmos_odr_set(STHS34PF80_ADDRESS, STHS34PF80_TMOS_ODR_AT_1Hz);
int32_t cnt = 0;
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
sths34pf80_tmos_drdy_status_get(STHS34PF80_ADDRESS, &status);
if (status.drdy)
{
sths34pf80_tmos_func_status_get(STHS34PF80_ADDRESS, &func_status);
printf("-->环境温度冲击检测标志位 %d - 存在检测标志位 %d - 运动检测标志位 %d\r\n",func_status.tamb_shock_flag, func_status.pres_flag, func_status.mot_flag);
}
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */