【机器人学习】分拣机器人运动学分析及轨迹规划仿真
下载链接:包括matlab程序+word报告+视频动画,具体如下图
下载链接:版本二
下载链接:版本三
下载链接:版本三
一、 目的
1、设计一个六自由度机器人,至少包含一个伸缩关节,要求机器人工作空间能满足分拣工位要求。
2、根据自己设计的机器人,建立DH坐标系,设定各关节变量的取值范围,并列出齐次变换矩阵并在matlab进行仿真。
二、内容
1、下载并安装MATLAB里的 Robotic机器人工具箱。
2、编写机器人位姿运动学方程,即给定关节变量,求解机器人末端相对于基坐标的齐次变换矩阵。并在此基础上,用工具箱里的命令fkine验证程序的正确性。
3、编写机器人速度运动学中求解雅克比矩阵的程序,并在此基础上,用工具箱里的命令jacob0验证程序的正确性。
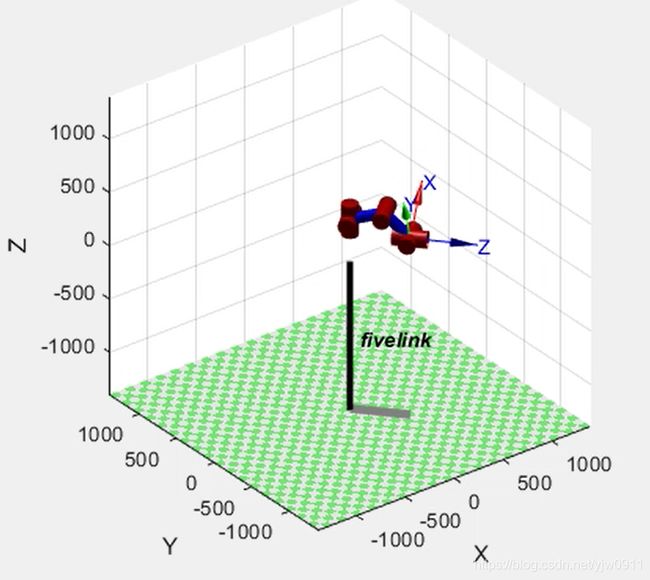
4、使用机器人工具箱建立机器人连杆模型(如图3),并在此基础上,绘制机器人工作空间。

图3机器人连杆模型
5、利用机器人工具箱里的ikine命令求取机器人运动学逆解,基本要求是末端实现位置逆解。利用逆解完成简单的末端路径仿真,例如控制机械臂末端从传送带运动到篮筐的四个角落。
6、自行选定机器人末端抓取物品的起点和终点,以及机器人末端完成任务所需的时间。并在此基础上,利用机器人学轨迹规划的常用方法,对其做关节空间的轨迹规划。需要注意的是,避免在运动过程中使末端碰到障碍。取0.1s为时间步长,利用求解雅克比矩阵的程序,每一个时间步长,求一次雅克比矩阵行列式,并画出其与时间的关系。
三、程序
定义机器人:
%六连杆机器人模型
p=pi/2
% theta d a alpha
L(1)=Link([0, 400, 0, 0],'modified')
L(2)=Link([0, 0, 0, p],'modified')
L(3)=Link([0, 0, 300, 0],'modified')
L(4)=Link([0, 0, 300, 0],'modified')
L(5)=Link([0, 0, 0, p],'modified')
L(6)=Link([0, 0, 0, 0],'modified')
L(1).qlim = pi/180*[-180 180];
L(2).qlim = pi/180*[0 180];
L(3).qlim = pi/180*[-90 90];
L(4).qlim = pi/180*[0 180];
L(5).qlim = pi/180*[-180 180];
L(6).qlim = [0 400];
L(6).jointtype='P'
six_link=SerialLink(L,'name','fivelink')
根据DH参数求解变换矩阵的函数trans:
%输入JD,即6个关节变量的值,求解正运动方程
function [ T ] = trans( theta, d, a, alpha )
T =[
cos(theta), -sin(theta), 0, a;
sin(theta)*cos(alpha),cos(theta)*cos(alpha),-sin(alpha),-d*sin(alpha);
sin(theta)*sin(alpha),cos(theta)*sin(alpha),cos(alpha), d*cos(alpha);
0, 0, 0, 1
];
end
正向运动学:
%JD为输入的1*6的数组,代表6个关节变量
function [ T06 ] = fkine(JD)
if nargin<2; end
T01 =trans( JD(1), 400, 0, 0 );
T12 =trans( JD(2), 0, 0, pi/2 );
T23 =trans( JD(3), 0, 300, 0 );
T34 =trans( JD(4), 0, 300, 0 );
T45 =trans( JD(5), 0, 0, pi/2 );
T56 =trans( 0, JD(6), 0, 0 );
T06 =T01*T12*T23*T34*T45*T56;
end
求解雅可比:
略 。。。
工作空间:
略 。。。
轨迹规划:
略 。。。
关节空间的轨迹规划,求解雅克比行列式:
略 。。。
四、实验结果
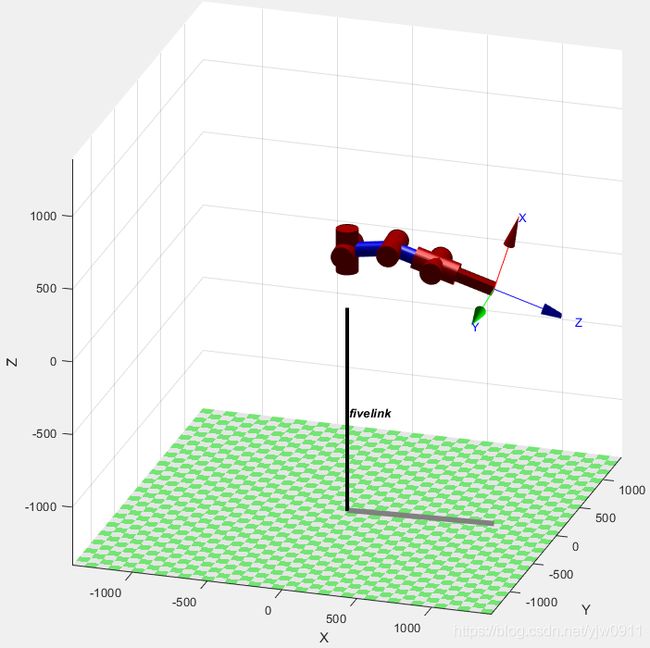
1.机器人模型:
由5个转动关节一个移动关节组成,最后的关节为移动关节
DH参数:

机器人仿真模型:
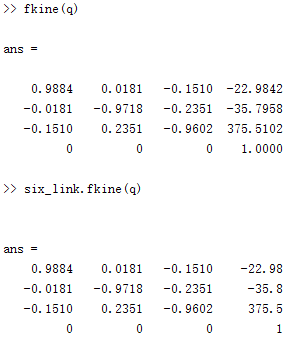
2.求解齐次变换矩阵,使用工具箱里的命令fkine验证:
q为关节变量,fkine()为自行编写的函数,six_link.fkine()为工具箱函数,结果一致:
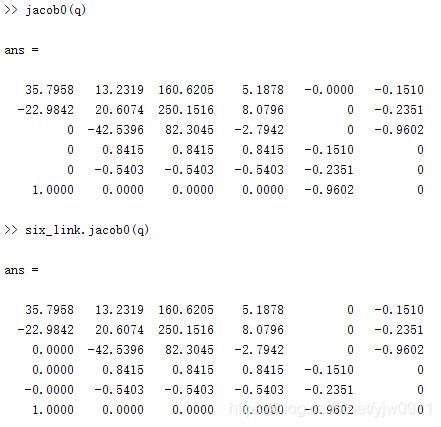
- 用工具箱里的命令jacob0验证编写的求解雅可比程序的正确性:
q为关节变量,jacob0()为自行编写的函数,six_link.jacob0()为工具箱函数,两者求解结果一致:
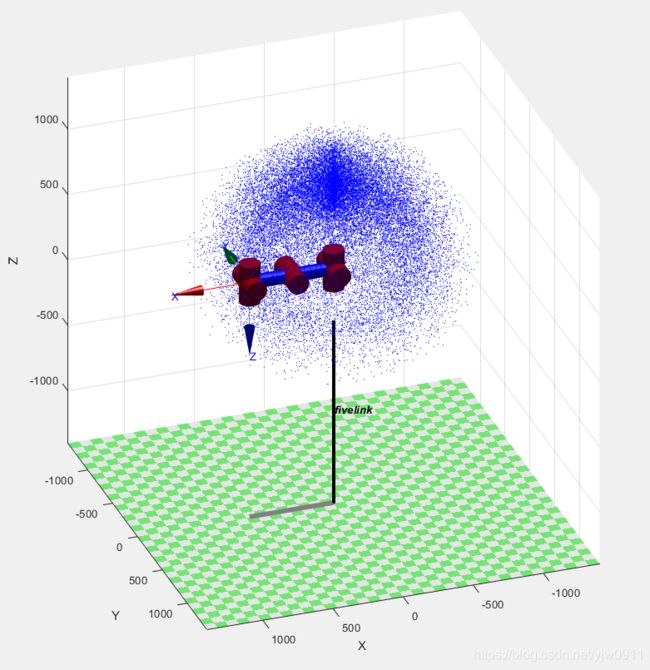
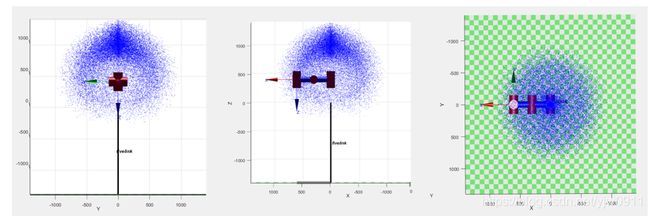
4.工作空间:
蓝色点形成的区域就是工作空间:
5.逆解仿真
定义了四个点,逆解后完成路径规划,规划结果见动画
- 关节空间的轨迹规划,以及雅克比矩阵行列式与时间的关系
关节空间的轨迹规划结果:

雅可比行列式与时间的关系:

下载链接:包括matlab程序+word报告+视频动画,具体如下图
下载链接:版本二
下载链接:版本三
下载链接:版本三
咨询链接:matlab正逆运动学分析与轨迹规划