zjuoj 3608 Signal Detection
http://acm.zju.edu.cn/onlinejudge/showProblem.do?problemCode=3608
| Parallelepiped | |
|---|---|
 |
|
| Type | Prism |
| Faces | 6 parallelograms |
| Edges | 12 |
| Vertices | 8 |
Dr. Gale is testing his laser system. He uses a detector to collect the signals from a laser generator. He also puts a special prism in the system so that he can filter the noise. But he is not very sure where to put the detector to collect the signals. Can you help him with this problem?
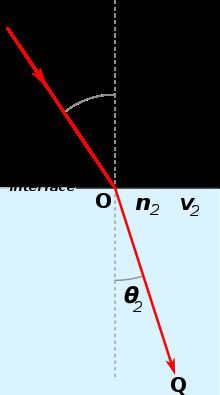

In order to simplify the problem, here we assume the prism is a parallelepiped, which is a three-dimensional figure formed by six parallelograms. The laser goes in one direction and the detector can receive signals from any direction. The detector is placed on the ground where the z-coordinate is zero. There is no energy lost in the refraction. That is to say, there is no reflection in the signal transmission. You don't need to consider the situation of total reflection or the degenerate situation.
Input
There are multiple test cases. The first line of input contains an integer T (T ≤ 50) indicating the number of test cases. Then T test cases follow.
The first line of each test case contains 3 integers, indicating the coordinates of the laser generator. The second line contains 3 integers describing a point the laser will go through without the prism. The third line contains 3 integers describing a vertex A of the prism. The fourth to the sixth lines contain 3 integers each, describing an adjacent vertex of A. The seventh line contains a real number u, the refractive index of the prism.(1 < u ≤ 10) The absolute value of the coordinates will not exceed 1000. The z coordinates are all nonnegative. The prism and the laser generator are strictly above the ground and the laser generator will not be inside the prism.
Output
If there is no place in the ground that can receive the signals output "Error". Otherwise, output the x and y coordinates the place accurate to 0.001.
Sample Input
2 0 0 10 0 0 0 -5 -5 1 5 -5 11 -5 5 1 -6 -5 2 1.4142136 0 0 10 0 0 11 -5 -5 1 5 -5 1 -5 5 1 -5 -5 2 2
Sample Output
0.423 0.000 Error
References
Author: GUAN, Yao
Contest: The 9th Zhejiang Provincial Collegiate Programming Contest
AC代码:


1 #include <cstdlib> 2 #include <cstdio> 3 #include <cstring> 4 #include <cmath> 5 #include <iostream> 6 #include <algorithm> 7 #include <string> 8 #include <vector> 9 #include <set> 10 #include <map> 11 #include <queue> 12 #include <time.h> 13 using namespace std; 14 typedef long long llong; 15 16 inline int bit(int x, int i){ return (x>>i) & 1;} 17 inline int setb(int x, int i){ return x | (1 << i);} 18 inline int clrb(int x, int i){ return x & (~(1 << i));} 19 inline int lowb(int x){return x & (-x);} 20 const double eps = 1e-9; 21 struct Point{ 22 double x, y, z; 23 Point(){} 24 Point(double x, double y, double z):x(x), y(y), z(z){} 25 double len(){ 26 return sqrt(x * x + y * y + z * z); 27 } 28 Point shrink(double l = 1.0){ 29 double s = l / len(); 30 return Point(x * s, y * s, z * s); 31 } 32 void input(){ 33 scanf("%lf %lf %lf", &x, &y, &z); 34 } 35 }; 36 37 Point operator +(const Point &p, const Point &q){ 38 return Point(p.x + q.x, p.y + q.y, p.z + q.z); 39 } 40 Point operator -(const Point &p, const Point &q){ 41 return Point(p.x - q.x, p.y - q.y, p.z - q.z); 42 } 43 Point operator *(const Point &p, const double &s){ 44 return Point(p.x * s, p.y * s, p.z * s); 45 } 46 Point operator *(const Point &p, const Point &q){ 47 return Point(p.y * q.z - p.z * q.y, 48 p.z * q.x - p.x * q.z, 49 p.x * q.y - p.y * q.x); 50 } 51 double operator &(const Point &p, const Point &q){ 52 return p.x * q.x + p.y * q.y + p.z * q.z; 53 } 54 55 Point p, q, v[8]; 56 double r; 57 int face[][4] ={ 58 {3, 2, 1, 0}, 59 {4, 5, 6, 7}, 60 {0, 1, 5, 4}, 61 {2, 3, 7, 6}, 62 {1, 2, 6, 5}, 63 {0, 4, 7, 3}, 64 }; 65 Point fn[6]; 66 double fb[6]; 67 68 double inter(const Point &p, const Point &d, const Point &n, double b){ 69 return (b - (n & p)) / (n & d); 70 } 71 bool collide(double R){ 72 int hf = -1; 73 double ht; 74 Point d = (q - p); 75 for(int i = 0;i < 6; ++i){ 76 if(fabs(fn[i] & d) < eps) continue; 77 double t = inter(p, d, fn[i], fb[i]); 78 if(t <= eps) continue; 79 Point hit = p + d * t; 80 bool ok = true; 81 for(int j = 0;j < 4; ++j){ 82 if((((v[face[i][j]]-hit) * (v[face[i][(j + 1)%4]] - hit)) & fn[i]) <= 0) ok = false; 83 } 84 if(ok && (hf < 0 || t < ht)){ 85 hf = i; 86 ht = t; 87 } 88 } 89 if(hf < 0) return false; 90 91 Point hit = p + d * ht; 92 Point vx = fn[hf].shrink(); 93 if(fabs((vx * d).len()) < eps){ 94 p = hit; 95 q = hit + d; 96 return true; 97 } 98 double dx = vx & d; 99 if(dx < 0) vx = vx * -1, dx = -dx; 100 Point vy = ((vx * d) * vx).shrink(); 101 double dy = vy & d; 102 if(dy < 0) vy = vy * -1, dy = -dy; 103 double theta0 = atan2(dy, dx); 104 double theta = asin(sin(theta0) / R); 105 d = vx * cos(theta) + vy * sin(theta); 106 p = hit; 107 q = hit + d; 108 return true; 109 } 110 int main(){ 111 int TT; 112 scanf("%d", &TT); 113 for(int cas = 1; cas <= TT; ++cas){ 114 p.input(); 115 q.input(); 116 117 v[0].input(); 118 v[1].input(); 119 v[3].input(); 120 v[2] = v[1] + v[3] - v[0]; 121 122 v[4].input(); 123 v[5] = v[4] + v[1] - v[0]; 124 v[6] = v[4] + v[2] - v[0]; 125 v[7] = v[4] + v[3] - v[0]; 126 127 scanf("%lf", &r); 128 for(int i = 0;i < 6; ++i){ 129 fn[i] = (v[face[i][1]] - v[face[i][0]]) * 130 (v[face[i][3]] - v[face[i][0]]); 131 fb[i] = fn[i] & v[face[i][0]]; 132 } 133 if(collide(r)){ 134 collide(1./r); 135 } 136 Point norm(0, 0, 1); 137 Point dir = q - p; 138 if(fabs(norm & dir) < eps) puts("Error"); 139 else{ 140 double t = inter(p, dir, norm, 0); 141 if(t < 0) puts("Error"); 142 else{ 143 Point hit = p + dir * t; 144 printf("%.3f %.3f\n", hit.x, hit.y); 145 } 146 } 147 } 148 return 0; 149 }