【正点原子STM32连载】第十章 跑马灯实验 摘自【正点原子】APM32F407最小系统板使用指南
1)实验平台:正点原子stm32f103战舰开发板V4
2)平台购买地址:https://detail.tmall.com/item.htm?id=609294757420
3)全套实验源码+手册+视频下载地址: http://www.openedv.com/thread-340252-1-1.html#
第十章 跑马灯实验
跑马灯程序是嵌入式开发的一个经典程序,类似于学习C语言时,编写的“Hello World”程序。跑马灯本质上是控制单片机的GPIO输出高低电平,以此达到控制LED等亮灭状态的切换。通过本章的学习,读者将学习到GPIO输出模式的使用。
本章分为如下几个小节:
10.1 硬件设计
10.2 程序设计
10.3 下载验证
10.1 硬件设计
10.1.1 例程功能
- LED0和LED1以500毫秒的频率交替闪烁,实现类似跑马灯的效果。
10.1.2 硬件资源 - LED
LED0 - PF9
LED1 - PF10
10.1.3 原理图
本章实验用的两个APM32F407最小系统板板载LED,分别为LED0(红色)和LED1(绿色),其与板载MCU的连接原理图,如下图所示:
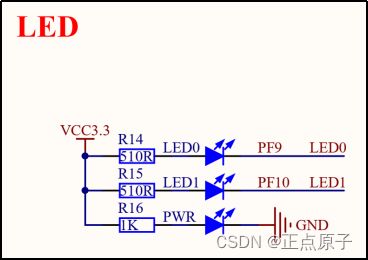
10.1.3.1 LED与MCU的连接原理图
从上面原理图中可以看出,LED0和LED1的正极分别通过一个限流电阻连接到了电源正极,而负极分别与MCU的PF9引脚和PF10引脚相连接,因此只需通过控制PF9引脚或PF10引脚输出低电平,则能分别控制LED0和LED1点亮,反之,则熄灭。
10.2 程序设计
10.2.1 Geehy标准库的GPIO驱动
本章实验中要通过控制GPIO引脚输出高低电平来控制LED的亮灭状态,因此需要以下两个步骤:
①:配置GPIO引脚为输出模式
②:设置GPIO引脚输出电平
在Geehy标准库中对应的驱动函数如下:
①:配置GPIO引脚
该函数用于配置GPIO引脚的功能和各项参数,其函数原型如下所示:
void GPIO_Config(GPIO_T* port, GPIO_Config_T* gpioConfig);
该函数的形参描述,如下表所示:
![]()
表10.2.1.2 函数GPIO_Config()返回值描述
该函数使用GPIO_Config_T类型的结构体变量传入GPIO引脚的配置参数,该结构体的定义如下所示:
typedef enum
{
GPIO_PIN_0 = ((uint16_t)BIT0), /* GPIO端口0号引脚 */
GPIO_PIN_1 = ((uint16_t)BIT1), /* GPIO端口1号引脚 */
GPIO_PIN_2 = ((uint16_t)BIT2), /* GPIO端口2号引脚 */
GPIO_PIN_3 = ((uint16_t)BIT3), /* GPIO端口3号引脚 */
GPIO_PIN_4 = ((uint16_t)BIT4), /* GPIO端口4号引脚 */
GPIO_PIN_5 = ((uint16_t)BIT5), /* GPIO端口5号引脚 */
GPIO_PIN_6 = ((uint16_t)BIT6), /* GPIO端口6号引脚 */
GPIO_PIN_7 = ((uint16_t)BIT7), /* GPIO端口7号引脚 */
GPIO_PIN_8 = ((uint16_t)BIT8), /* GPIO端口8号引脚 */
GPIO_PIN_9 = ((uint16_t)BIT9), /* GPIO端口9号引脚 */
GPIO_PIN_10 = ((uint16_t)BIT10) , /* GPIO端口10号引脚 */
GPIO_PIN_11 = ((uint16_t)BIT11), /* GPIO端口11号引脚 */
GPIO_PIN_12 = ((uint16_t)BIT12), /* GPIO端口12号引脚 */
GPIO_PIN_13 = ((uint16_t)BIT13), /* GPIO端口13号引脚 */
GPIO_PIN_14 = ((uint16_t)BIT14), /* GPIO端口14号引脚 */
GPIO_PIN_15 = ((uint16_t)BIT15), /* GPIO端口15号引脚 */
GPIO_PIN_ALL = ((uint32_t)0XFFFF), /* GPIO端口全部引脚 */
} GPIO_PIN_T;
typedef enum
{
GPIO_MODE_IN = 0x00, /* 输入模式 */
GPIO_MODE_OUT = 0x01, /* 通用输出模式 */
GPIO_MODE_AF = 0x02, /* 复用功能模式 */
GPIO_MODE_AN = 0x03 /* 模拟模式 */
} GPIO_MODE_T;
typedef enum
{
GPIO_SPEED_2MHz = 0x00, /* 低速 */
GPIO_SPEED_25MHz = 0x01, /* 中速 */
GPIO_SPEED_50MHz = 0x02, /* 低速 */
GPIO_SPEED_100MHz = 0x03 /* 高速 */
} GPIO_SPEED_T;
typedef enum
{
GPIO_OTYPE_PP = 0x00, /* 推挽输出 */
GPIO_OTYPE_OD = 0x01 /* 开漏输出 */
} GPIO_OTYPE_T;
typedef enum
{
GPIO_PUPD_NOPULL = 0x00, /* 禁止上拉/下拉 */
GPIO_PUPD_UP = 0x01, /* 上拉 */
GPIO_PUPD_DOWN = 0x02 /* 下拉 */
} GPIO_PUPD_T;
typedef struct
{
uint16_t pin; /* 指定要配置的GPIO引脚 */
GPIO_MODE_T mode; /* 模式 */
GPIO_SPEED_T speed; /* 输出速度 */
GPIO_OTYPE_T otype; /* 输出模式 */
GPIO_PUPD_T pupd; /* 上拉/下拉 */
} GPIO_Config_T;
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_gpio.h"
void example_fun(void)
{
GPIO_Config_T gpio_init_struct;
/* 配置PA0引脚为输出模式 */
gpio_init_struct.pin = GPIO_PIN_0;
gpio_init_struct.mode = GPIO_MODE_OUT;
gpio_init_struct.speed = GPIO_SPEED_100MHz;
gpio_init_struct.otype = GPIO_OTYPE_PP;
gpio_init_struct.pupd = GPIO_PUPD_UP;
GPIO_Config(GPIOA, &gpio_init_struct);
}
②:设置GPIO引脚输出电平
该函数用于设置GPIO引脚输出指定电平(高电平或低电平),其函数原型如下所示:
void GPIO_WriteBitValue(GPIO_T* port, uint16_t pin, uint8_t bitVal);
该函数的形参描述,如下表所示:
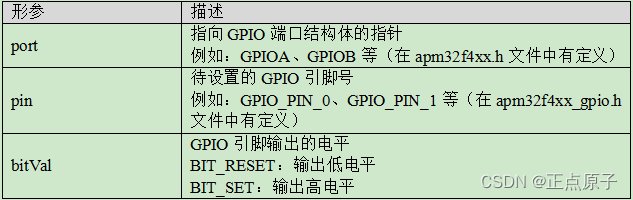
表10.2.1.3 函数GPIO_WriteBitValue()形参描述
该函数的返回值描述,如下表所示:

表10.2.1.4 函数GPIO_WriteBitValue()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_gpio.h"
void example_fun(void)
{
/* 设置PA0引脚输出低电平 */
GPIO_WriteBitValue(GPIOA, GPIO_PIN_0, BIT_RESET);
/* 设置PA0引脚输出高电平 */
GPIO_WriteBitValue(GPIOA, GPIO_PIN_0, BIT_SET);
}
③:翻转GPIO引脚输出电平(补充)
该函数用于翻转GPIO引脚的输出电平,其函数原型如下所示:
void GPIO_ToggleBit(GPIO_T* port, uint16_t pin);
该函数的形参描述,如下表所示:
形参 描述
port 指向GPIO端口结构体的指针
例如:GPIOA、GPIOB等(在apm32f4xx.h文件中有定义)
pin 待设置的GPIO引脚号
例如:GPIO_PIN_0、GPIO_PIN_1等(在apm32f4xx_gpio.h文件中有定义)
表10.2.1.5 GPIO_ToggleBit()形参描述
该函数的返回值描述,如下表所示:
返回值 描述
无 无
表10.2.1.6 GPIO_TogglePin()返回值描述
该函数的使用示例,如下所示:
#include "apm32f4xx.h"
#include "apm32f4xx_gpio.h"
void example_fun(void)
{
/* 翻转PA0引脚输出电平 */
GPIO_ToggleBit(GPIOA, GPIO_PIN_0);
}
10.2.2 LED驱动
LED驱动主要就是控制GPIO引脚输出高低电平,来控制LED亮起或熄灭。本章实验中,LED的驱动代码包括led.c和led.h两个文件(本书配套实验例程中,器件或外设的驱动代码基本都由一个C源文件和一个对应的头文件组成)。
根据原理图可知,应当将PF9引脚和PF10引脚配置为通用输出模式,并在需要控制LED0(LED1)亮起的时候,设置PF9引脚(PF10引脚)输出低电平,在需要控制LED0(LED1)熄灭的时候,设置PF9引脚(PF10引脚)输出高电平。
LED驱动中,对引脚的定义,如下所示:
#define LED0_GPIO_PORT GPIOF
#define LED0_GPIO_PIN GPIO_PIN_9
#define LED0_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOF); \
} while (0)
#define LED1_GPIO_PORT GPIOF
#define LED1_GPIO_PIN GPIO_PIN_10
#define LED1_GPIO_CLK_ENABLE() \
do { \
RCM_EnableAHB1PeriphClock(RCM_AHB1_PERIPH_GPIOF); \
} while (0)
在后续的实验代码中,基本都会使用上述的宏定义的方式定义GPIO引脚的各种信息(GPIO端口、GPIO引脚号、GPIO端口时钟使能和GPIO复用功能等信息)。
LED驱动中,操作引脚的定义,如下所示:
#define LED0(x) \
do { x ? \
GPIO_SetBit(LED0_GPIO_PORT, LED0_GPIO_PIN) : \
GPIO_ResetBit(LED0_GPIO_PORT, LED0_GPIO_PIN); \
} while (0)
#define LED1(x) \
do { x ? \
GPIO_SetBit(LED1_GPIO_PORT, LED1_GPIO_PIN) : \
GPIO_ResetBit(LED1_GPIO_PORT, LED1_GPIO_PIN); \
} while (0)
#define LED0_TOGGLE() \
do { \
GPIO_ToggleBit(LED0_GPIO_PORT, LED0_GPIO_PIN); \
} while (0)
#define LED1_TOGGLE() \
do { \
GPIO_ToggleBit(LED1_GPIO_PORT, LED1_GPIO_PIN); \
} while (0)
在后续实验代码中,基本都会使用上述的宏定义的方式定义GPIO引脚的操作(设置GPIO引脚输出高电平或低电平、翻转GPIO引脚输出电平和读取GPIO引脚输入电平等操作)。
LED驱动中,LED的初始化函数,如下所示:
/**
* @brief 初始化LED
* @param 无
* @retval 无
*/
void led_init(void)
{
GPIO_Config_T gpio_init_struct;
/* 使能时钟 */
LED0_GPIO_CLK_ENABLE();
LED1_GPIO_CLK_ENABLE();
/* 配置LED0引脚 */
gpio_init_struct.pin = LED0_GPIO_PIN; /* LED0引脚 */
gpio_init_struct.mode = GPIO_MODE_OUT; /* 输出模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_DOWN; /* 下拉 */
GPIO_Config(LED0_GPIO_PORT, &gpio_init_struct); /* 配置LED0引脚 */
/* 配置LED1引脚 */
gpio_init_struct.pin = LED1_GPIO_PIN; /* LED1引脚 */
gpio_init_struct.mode = GPIO_MODE_OUT; /* 输出模式 */
gpio_init_struct.speed = GPIO_SPEED_100MHz; /* 高速 */
gpio_init_struct.otype = GPIO_OTYPE_PP; /* 推挽输出 */
gpio_init_struct.pupd = GPIO_PUPD_DOWN; /* 下拉 */
GPIO_Config(LED1_GPIO_PORT, &gpio_init_struct); /* 配置LED1引脚 */
/* 默认关闭所有LED */
LED0(1);
LED1(1);
}
LED的初始化函数中,使能了LED0和LED1控制引脚的GPIO端口时钟,并将其配置为通用输出模式,最后默认将LED的状态设置为熄灭状态。
10.2.3 实验应用代码
本章实验的应用代码,如下所示:
int main(void)
{
NVIC_ConfigPriorityGroup(NVIC_PRIORITY_GROUP_3); /* 设置中断优先级分组为组3 */
sys_apm32_clock_init(336, 8, 2, 7); /* 配置系统时钟 */
delay_init(168); /* 初始化延时功能 */
usart_init(115200); /* 初始化串口 */
led_init(); /* 初始化LED */
while (1)
{
LED0(0); /* LED0亮 */
LED1(1); /* LED1灭 */
delay_ms(500); /* 延时500毫秒 */
LED0(1); /* LED0灭 */
LED1(0); /* LED1亮 */
delay_ms(500); /* 延时500毫秒 */
}
}
可以看到,在调用LED初始化之前,会先调用以下函数:
NVIC_ConfigPriorityGroup(NVIC_PRIORITY_GROUP_3); /* 设置中断优先级分组为组3 */
sys_apm32_clock_init(336, 8, 2, 7); /* 配置系统时钟 */
delay_init(168); /* 初始化延时功能 */
usart_init(115200); /* 初始化串口 */
①:第一行代码用于设置中断优先级分组为组3,主要用于后续配置中断时使用,并且在后续应用代码运行时,强烈不建议再修改中断优先级分组设置,因此在一开始初始化时先设置好中断优先级分组。
②:第二行代码用于配置系统时钟,因为大部分实验例程都无需考虑低功耗应用,因此大部分实验例程配置系统时钟的参数都与本实验一致,将系统主频配置为168MHz。
③:第三行代码用于初始化延时功能,为后续的应用代码提供微秒级和毫秒级的延时的功能。
④:第四行代码用于初始化用于调试功能的USART1,为后续的应用代码提供printf等功能,方面通过串口调试助手查看程序运行情况。
⑤:以上四行代码都是执行一些必要的初始化,基本在后续的每一个实验例程中都会看见,后续不再赘述。
执行完必要的初始化后,紧接着初始化LED,然后在一个while循环中重复地控制板载LED0和LED1轮流亮起和熄灭,轮流时间为500毫秒,以此实现跑马灯的效果。
10.3 下载验证
在完成编译和烧录操作后,可以看到板子上的LED0和LED1轮流亮起和熄灭,轮流的时间大约为500毫秒,与预期的实验效果相符。