- 基于 STC89C52 的 8x8 点阵显示数字
@小张要努力
单片机嵌入式硬件stm3251单片机proteus
一、引言在电子设计领域,信息的有效展示是众多项目的关键环节。8x8点阵作为一种经济且实用的显示模块,能够呈现数字、简单字母及图形等信息,在电子时钟、简易游戏机等产品中广泛应用。STC89C52单片机凭借其低成本、丰富的I/O资源与稳定的性能,成为驱动8x8点阵的理想选择。本文将深入探讨如何利用STC89C52单片机结合74LS245芯片,实现8x8点阵的数字显示功能,并借助Proteus软件进行仿
- 基于 STC89C52 的智能秒表
@小张要努力
单片机stm3251单片机proteusmcuc++c语言
引言秒表作为一种常见的计时工具,在体育赛事、实验测量等众多场景中有着广泛应用。随着电子技术的发展,基于单片机的智能秒表凭借其高精度、多功能等优势逐渐取代传统机械秒表。本文将详细介绍一款基于STC89C52单片机的智能秒表设计,该秒表通过两位数码管进行时间显示。STC89C52单片机特性回顾STC89C52是一款性能卓越的8位CMOS微控制器。它拥有8K字节的系统可编程Flash存储器,可方便地存储
- stm32-定时器
Amy.com
stm32嵌入式硬件单片机
一、定时器PLL锁相环:作用是倍频prescale:降频2440芯片定时器配置2.代码:t&=~((0xff<<12)|(0x3f<<4)|(3<<0));t|=(127<<12);t|=(2<<4);t|=(1<<0);CLKDIVN|=(2<<1)|(1<<0);二、PWM定时器控制寄存器单稳态:执行一次后关闭间隙模式:反复执行
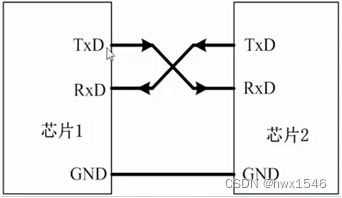
- 多个单片机之间的SPI主从通讯
菜长江
单片机嵌入式硬件
工程文件链接:链接:https://pan.baidu.com/s/1RXp9lw2ZqyglQSwKnw7Siw?pwd=6666提取码:6666工程里面有很多例子都是看B站视频手打的(这次代码只用到了YJSPI文件夹下面的.C和.H文件其余可以忽略),只是验证通讯和配置一,概述1.因为工作是从事PCBA测试软件开发的(上位机),之前做过的很多项目都是一个单片机完成所有功能,做了有段时间了无非就
- stm32定时器实现 微秒延时
随风飘零翼
stm32stm32单片机嵌入式硬件
Cubemx配置图初始化无需使能定时器中断。代码如下:voiddelay_us(uint16_tus){uint16_tdiffer=0xffff-us-5;__HAL_TIM_SET_COUNTER(&htim17,differ);//清空定时器17HAL_TIM_Base_Start(&htim17);//启动定时器while(differ<0xffff-5){//计算differ=__HAL
- H743定时器输出PWM波方法(基于STM32CubeMX)
NW嵌入式开发
单片机开发stm32定时器PWM模式
0工具准备1.STM32CubeMX2.《STM32H743参考手册中文版》3.《stm32h743xi数据手册》1前言本文介绍基于STM32CubeMX,使用stm32h743xi,使用TIM15的通道2输出PWM波的方法。2H743定时器输出PWM波方法(基于STM32CubeMX)《STM32H743参考手册中文版》对PWM模式的描述如下:其中,有关PWM模式1和模式2的介绍见TIM15_C
- STM8L1xx利用定时器实现毫秒和微妙延时
荣070214
STM8单片机单片机毫秒和微妙延时
采用单片机的定时计数器进行毫秒和微妙级延时,精度较准。检测溢出时产生的标志位来判断延时到达。下面以STM8L101芯片为例及配合代码说明。一、实现原理:1、初始化Timer2时钟源(附上相应代码)voidTIM2Init(void){TIM2_DeInit();CLK_PeripheralClockConfig(CLK_Peripheral_TIM2,ENABLE);TIM2->CR1&=((ui
- 入门级带你实现一个安卓智能家居APP(2)kotlin版本
一粒程序米
androidkotlin智能家居WiFi单片机
前言上一篇写过java版本的实现,这一篇就写一下kotlin版本的吧。效果展示本APP是通过tcp/ip协议与连了WiFi的单片机通信。其实除了主活动类和新建项目时有一丢丢不同,其他的都是一样的哈~第一步:你得会一点点kotlin基础,建议看一本书,是郭霖大神些的《第一行代码》第三版,里面除了安卓的基础教学,还有kotlin的。第二步:建议看一本书,是郭霖大神些的《第一行代码》,先入门安卓基础。不
- 如何一键修改MDK代码风格以及error in include chain (cmsis_armcc.h): expected identfieror报错解决方法
superior tigre
单片机单片机stm32嵌入式硬件
目录一、修改MDK代码风格的两种方法1.直接设置2.替换global.prop文件,一键设置二、errorinincludechain(xxxxxxx.h):expectedidentfieror等报错的解决方法一、修改MDK代码风格的两种方法最近在学习某原子stm32的HAL库视频,被教学代码的风格深深吸引,感觉keil默认代码风格是越看越别扭,所以决定自己修改一下代码的格式,总结了两种方法,这
- 【江协STM32】11-2/3 W25Q64简介、软件SPI读写W25Q64
冰糖雪莲IO
stm32嵌入式硬件单片机
1.W25Q64简介W25Qxx系列是一种低成本、小型化、使用简单的非易失性存储器,常应用于数据存储、字库存储、固件程序存储等场景存储介质:NorFlash(闪存)时钟频率:80MHz/160MHz(DualSPI)/320MHz(QuadSPI)存储容量(24位地址):W25Q40:4Mbit/512KByteW25Q80:8Mbit/1MByteW25Q16:16Mbit/2MByteW25Q
- STM32F103C8T6点灯/流水灯(指定IO,正向反向)
BDXiaotianYA
stm32嵌入式硬件单片机
参加2023年电赛后,到现在上班一年多,长达两年时间内,几乎没有再碰过单片机,由于现在工作中需要接触到一些代码,先退回来复习下32单片机。本人在此做一件事情,傻瓜式代码,让代码足够简洁,足够规范,让你复制我的代码百分百能够使用。此账号仅作为分享本人复习过程中记录使用,如果无法使用,或者或者有优化的地方,欢迎留言,看到后第一时间给予回复。有空会将2023激光打靶代码开源出来。在使用本程序的时候,默认
- STM32八股【2】-----ARM架构
Invinciblenuonuo
stm32arm开发架构
1、架构包含哪几部分内容寄存器处理模式流水线MMU指令集中断FPU总线架构2、以STM32为例进行介绍2.1寄存器寄存器名称作用R0-R3通用寄存器用于数据传递、计算及函数参数传递;R0也用于存储函数返回值。R4-R12通用寄存器用于存储局部变量,减少频繁的内存访问。R13栈指针(SP)指向当前栈顶,负责管理栈操作。分为主栈指针(MSP)和进程栈指针(PSP):系统中断处理和普通任务可以使用不同的
- STM32八股【1】-----启动流程和startup文件理解
Invinciblenuonuo
stm32arm
启动流程知识点MCU上电复位。MSP从向量表第0个地址读取一个32位(2字节)的值并保存,该值为栈顶地址。PC计数器从第1个地址读取一个两字节的值并保存,该值为程序入口,一般是Reset_Handler。想了解FLASH地址映射可以看STM32八股【4】-----AHB地址映射__VectorsDCD__initial_sp;TopofStackDCDReset_Handler;ResetHand
- 解决stm32引脚如果选择输入模式
雁过留声花欲落
单片机嵌入式硬件
1.输入模式分类STM32的GPIO输入模式主要分为以下四种:浮空输入(FloatingInput/InputFloating)上拉输入(InputPull-Up)下拉输入(InputPull-Down)模拟输入(AnalogInput)2.各模式详解(1)浮空输入(FloatingInput)电路结构:引脚内部不连接上拉或下拉电阻,完全由外部电路决定电平状态。等效电路:引脚直接连接施密特触发器(
- STM32八股【3】------RAM和片上FLASH
Invinciblenuonuo
stm32嵌入式硬件单片机
1、RAM和FLASH构成1.RAM┌──────────────────────────┐│栈区(Stack)│←从RAM顶端向下扩展(存储局部变量、函数调用信息)│--------------------------││堆区(Heap)│←从.bss段底部向上扩展(动态分配的内存,如malloc)│--------------------------││.bss未初始化数据区│←未初始化的全局
- 嵌入式硬件篇---蓝牙模块
Ronin-Lotus
嵌入式硬件篇程序代码篇嵌入式硬件网络c蓝牙
文章目录前言一、核心技术原理蓝牙工作流程设备发现阶段配对连接阶段数据传输阶段二、协议栈架构(以BLE为例)1.物理层2.链路层3.HCI层4.GATT三、典型应用场景扩展1.室内定位系统(蓝牙5.1+)2.运动健康监测3.工业控制四、ESP32开发示例(BLE+经典蓝牙)1.环境配置2.BLE服务端代码3.经典蓝牙串口通信五、关键技术参数对比六、开发调试技巧空中抓包分析七、最新技术演进(蓝牙5.4
- [项目]基于FreeRTOS的STM32四轴飞行器: 十.检测遥控器
嵌入式T90S
stm32嵌入式硬件单片机
基于FreeRTOS的STM32四轴飞行器:十.检测遥控器一.检测遥控器连接逻辑二.遥控器的解锁情况三.遥控器控制飞机运转一.检测遥控器连接逻辑判断是否进入定高模式:根据返回值判断遥控器的连接情况:实现检测函数:因为该函数在通信任务中调度6ms一次,可以使用cnt进行计时,判断是否失联:开头初始化cnt为200可以防止一启动没有连接显示连接成功的问题。/***@description:用来检测遥控
- 单片机 - RAM 与内存、ROM 与硬盘 之间的详细对比总结
Peter_Deng.
单片机嵌入式硬件
RAM与内存RAM(RandomAccessMemory,随机存取存储器)和内存这两个术语通常是同义词,即内存常常指的就是RAM。1.RAM(内存)定义:RAM是计算机中的主存储器,用于临时存储正在运行的程序和数据。所有正在进行的操作,包括正在运行的程序、操作系统和应用程序数据,都存储在RAM中。工作原理:RAM通过直接访问任何位置的方式存取数据,故称为随机存储。数据存取速度非常快,因此在计算机中
- 【43】单片机编程核心技巧:指针基础与应用详解
智木芯语
【编程技巧】单片机嵌入式硬件#STM32#STC8嵌入式
【43】单片机编程核心技巧:指针基础与应用详解七律·指针寻址指针寻址变量间,间接操作更灵活。数组处理显优势,常量绑定守规则。绑定卸装需谨慎,地址自增效率高。C语言魂在指针,编程精髓需掌握。摘要本文系统阐述C语言指针的基础概念、操作方法及应用场景,涵盖指针与普通变量的对比、数组处理、常量指针特性等内容。通过代码示例与流程图解析,阐明指针的间接操作优势及内存寻址机制。文档遵循模块化设计规范,结合嵌入式
- 基于STM32设计的健康检测设备(测温心率计步)(局域网)
DS小龙哥
智能家居与物联网项目实战stm32嵌入式单片机
1.项目介绍1.1开发背景本项目设计一款基于STM32F103RCT6微控制器的便携式健康监测设备,该设备能够实时监测并记录用户的生理参数,包括人体温度、心率以及日常活动中的步数,并具备将这些数据可视化显示在设备自带的OLED屏幕上的能力。此外,该设备还提供了通过Wi-Fi模块ESP8266将收集到的数据无线传输至用户的智能手机或个人计算机的功能,以便用户能够更加方便地管理自己的健康信息。为了实现
- 嵌入式硬件电路设计
孤芳剑影
嵌入式嵌入式硬件单片机stm32
第一、电源确定 电源对于嵌入式系统中的作用可以看做是空气对人体的作用,甚至更重要:人呼吸的空气中有氧气、二氧化碳和氮气等但是含量稳定,这就相当于电源系统中各种杂波,我们希望得到纯净和稳定符合要求的电源,但由于各种因素制约,只是我们的梦想。这个要关注两个方面:a、电压: 嵌入式系统需要各种量级的电源比如常见的5v、3.3v、1.8v等,为尽量减小电源的纹波,在嵌入式系统中使用LDO器件。如果采用
- 基于32单片机的无人机直流电机闭环调速系统设计
赵谨言
论文毕业设计经验分享
标题:基于32单片机的无人机直流电机闭环调速系统设计内容:1.摘要本文针对无人机直流电机调速需求,设计了基于32单片机的无人机直流电机闭环调速系统。背景在于无人机应用场景不断拓展,对电机调速精度和稳定性要求日益提高。目的是开发一套高精度、响应快的闭环调速系统,以提升无人机飞行性能。方法上,采用32单片机作为控制核心,结合编码器反馈电机转速信息,运用PID控制算法实现闭环调速。通过实验测试,结果表明
- 嵌入式硬件设计 — 智能设备背后的隐形架构大师
m0_74825238
面试学习路线阿里巴巴嵌入式硬件架构
目录引言?一、嵌入式硬件设计概述(一)需求分析(二)硬件选型(三)电路设计(四)PCB制作与焊接(五)硬件调试与测试(六)软件移植与开发二、嵌入式硬件选型(一)微控制器(MCU)/微处理器(MPU)(二)存储器(三)传感器与执行器(四)电源管理芯片(五)通信接口芯片三、嵌入式硬件代码开发(一)开发环境搭建(二)底层驱动程序开发引言嵌入式系统已经渗透到我们生活的方方面面,从智能手机、智能家居到工业自
- C语言,记录一次局部变量被意外修改的问题
三日沐水
嵌入式全套学习教程c语言
背景:单片机开发过程中,我在函数体内(begin_face_record)定义了一个局部变量data_length,在使用的时候,该局部变量一直别改变,每次调用其他函数,例如c库里面的函数memcpy,不知什么情况data_length值就会被改变。1、源码分析voidmain(void){init_gpio();init_face();face_power_up();begin_face_rec
- ESP32学习 -从STM32工程架构进阶到ESP32架构
古希腊掌握嵌入式的神
学习stm32架构esp32
ESP32与STM32项目文件结构对比解析以下是对你提供的ESP32项目文件结构的详细解释,并与STM32(以STM32CubeIDE为例)的常见结构进行对比,帮助你理解两者的差异:1.ESP32项目文件解析文件/目录作用STM32对应或差异settingsIDE(如VSCode或Eclipse)的用户配置文件,存储个性化设置。STM32CubeIDE中类似配置存储在.settings目录或IDE
- stm32完全学习——NRF24L01模块
小A159
STM32完全学习stm32学习嵌入式硬件
对于这个模块的移植,无论是标准库还是HAL库,无论是软件模拟SPI还是,硬件SPI通信,网上都有很多的例子,这里关于移植的事情就不再赘述了。一、调试中遇到的一些问题我是用的别人的代码进行移植的,使用的是软件模拟SPI时序,在进行通信的时候,可以正确检测到NRF24L01的存在,但是发送数据和接收数据都不能成功的运行,本来以为是发送的时候数据包设置的不正确,后来发现他的代码里面使用软件SPI里面的延
- STM32f429串口通信-基于HAL库
大大大冯小小
串口通信stm32嵌入式
STM32f429串口通信接收-基于HAL库串口接收配置步骤1.调用函数HAL_UART_Init(UART_HandleTypeDef*huart)。通过定义结构体类型句柄UART_HandleTypeDef并初始化相关参数来配置串口通信的选用串口、字长、波特率、停止位、奇偶校验位、硬件流控、收发模式、DMA等。UART_HandleTypeDefusart1_handler;//UART句柄结
- HAL库操作STM32串口
2021.09
STM32-CubeMXstm32单片机arm
本次博客知识来自于韦东山老师的7天物联网课程。一、cubeMX产生工程框架先从左侧选择串口1,再选择异步通信。二、分析程序如下图,cubeMX自动生成了串口初始化函数。三、编写程序以上初始化完成后,就可以使用HAL库提供的“HAL_UART_Transmit()”从串口发送数据,使用“HAL_UART_Receive()”接收数据,但这样使用不方便,需要自己处理数据类型。在学习C语言时,通常使用p
- STM32寄存器编码流程总结(上部)
物联网菜鸟
基础知识学习stm32单片机嵌入式硬件
目录一、GPIO二、中断系统三、USART串口通信四、I2C通讯五、高级定时器六、DMA存储访问七、ADC数模转换八、API通信九、FSMC控制器十、LCD显示一、GPIO1.时钟的配置//开启引脚的时钟RCC->APB2ENR|=RCC_APB2ENR_IOPAEN;2.设置GPIO的工作模式//PA0的工作模式为通用推挽输出模式//CNF选择输入或输出的不同模式GPIOA->CRL&=~GPI
- 嵌入式笔记 | 正点原子STM32F103ZET6 3 | 时钟系统
J鸟
笔记stm32单片机嵌入式硬件
1.RCC(复位和时钟控制)RCC(ResetandClockControl)是STM32的时钟系统控制模块,负责管理整个芯片的时钟信号。在使用任何外设之前,必须先使能其时钟。2.时钟系统框图解析时钟源(5种)HSI(高速内部时钟)由内部RC振荡器产生,默认8MHz精度较低,适用于对时钟精度要求不高的应用可作为系统时钟源HSE(高速外部时钟)由外部晶振(石英/陶瓷谐振器或外部时钟)产生,频率范围4
- ASM系列五 利用TreeApi 解析生成Class
lijingyao8206
ASM字节码动态生成ClassNodeTreeAPI
前面CoreApi的介绍部分基本涵盖了ASMCore包下面的主要API及功能,其中还有一部分关于MetaData的解析和生成就不再赘述。这篇开始介绍ASM另一部分主要的Api。TreeApi。这一部分源码是关联的asm-tree-5.0.4的版本。
在介绍前,先要知道一点, Tree工程的接口基本可以完
- 链表树——复合数据结构应用实例
bardo
数据结构树型结构表结构设计链表菜单排序
我们清楚:数据库设计中,表结构设计的好坏,直接影响程序的复杂度。所以,本文就无限级分类(目录)树与链表的复合在表设计中的应用进行探讨。当然,什么是树,什么是链表,这里不作介绍。有兴趣可以去看相关的教材。
需求简介:
经常遇到这样的需求,我们希望能将保存在数据库中的树结构能够按确定的顺序读出来。比如,多级菜单、组织结构、商品分类。更具体的,我们希望某个二级菜单在这一级别中就是第一个。虽然它是最后
- 为啥要用位运算代替取模呢
chenchao051
位运算哈希汇编
在hash中查找key的时候,经常会发现用&取代%,先看两段代码吧,
JDK6中的HashMap中的indexFor方法:
/**
* Returns index for hash code h.
*/
static int indexFor(int h, int length) {
- 最近的情况
麦田的设计者
生活感悟计划软考想
今天是2015年4月27号
整理一下最近的思绪以及要完成的任务
1、最近在驾校科目二练车,每周四天,练三周。其实做什么都要用心,追求合理的途径解决。为
- PHP去掉字符串中最后一个字符的方法
IT独行者
PHP字符串
今天在PHP项目开发中遇到一个需求,去掉字符串中的最后一个字符 原字符串1,2,3,4,5,6, 去掉最后一个字符",",最终结果为1,2,3,4,5,6 代码如下:
$str = "1,2,3,4,5,6,";
$newstr = substr($str,0,strlen($str)-1);
echo $newstr;
- hadoop在linux上单机安装过程
_wy_
linuxhadoop
1、安装JDK
jdk版本最好是1.6以上,可以使用执行命令java -version查看当前JAVA版本号,如果报命令不存在或版本比较低,则需要安装一个高版本的JDK,并在/etc/profile的文件末尾,根据本机JDK实际的安装位置加上以下几行:
export JAVA_HOME=/usr/java/jdk1.7.0_25
- JAVA进阶----分布式事务的一种简单处理方法
无量
多系统交互分布式事务
每个方法都是原子操作:
提供第三方服务的系统,要同时提供执行方法和对应的回滚方法
A系统调用B,C,D系统完成分布式事务
=========执行开始========
A.aa();
try {
B.bb();
} catch(Exception e) {
A.rollbackAa();
}
try {
C.cc();
} catch(Excep
- 安墨移动广 告:移动DSP厚积薄发 引领未来广 告业发展命脉
矮蛋蛋
hadoop互联网
“谁掌握了强大的DSP技术,谁将引领未来的广 告行业发展命脉。”2014年,移动广 告行业的热点非移动DSP莫属。各个圈子都在纷纷谈论,认为移动DSP是行业突破点,一时间许多移动广 告联盟风起云涌,竞相推出专属移动DSP产品。
到底什么是移动DSP呢?
DSP(Demand-SidePlatform),就是需求方平台,为解决广 告主投放的各种需求,真正实现人群定位的精准广
- myelipse设置
alafqq
IP
在一个项目的完整的生命周期中,其维护费用,往往是其开发费用的数倍。因此项目的可维护性、可复用性是衡量一个项目好坏的关键。而注释则是可维护性中必不可少的一环。
注释模板导入步骤
安装方法:
打开eclipse/myeclipse
选择 window-->Preferences-->JAVA-->Code-->Code
- java数组
百合不是茶
java数组
java数组的 声明 创建 初始化; java支持C语言
数组中的每个数都有唯一的一个下标
一维数组的定义 声明: int[] a = new int[3];声明数组中有三个数int[3]
int[] a 中有三个数,下标从0开始,可以同过for来遍历数组中的数
- javascript读取表单数据
bijian1013
JavaScript
利用javascript读取表单数据,可以利用以下三种方法获取:
1、通过表单ID属性:var a = document.getElementByIdx_x_x("id");
2、通过表单名称属性:var b = document.getElementsByName("name");
3、直接通过表单名字获取:var c = form.content.
- 探索JUnit4扩展:使用Theory
bijian1013
javaJUnitTheory
理论机制(Theory)
一.为什么要引用理论机制(Theory)
当今软件开发中,测试驱动开发(TDD — Test-driven development)越发流行。为什么 TDD 会如此流行呢?因为它确实拥有很多优点,它允许开发人员通过简单的例子来指定和表明他们代码的行为意图。
TDD 的优点:
&nb
- [Spring Data Mongo一]Spring Mongo Template操作MongoDB
bit1129
template
什么是Spring Data Mongo
Spring Data MongoDB项目对访问MongoDB的Java客户端API进行了封装,这种封装类似于Spring封装Hibernate和JDBC而提供的HibernateTemplate和JDBCTemplate,主要能力包括
1. 封装客户端跟MongoDB的链接管理
2. 文档-对象映射,通过注解:@Document(collectio
- 【Kafka八】Zookeeper上关于Kafka的配置信息
bit1129
zookeeper
问题:
1. Kafka的哪些信息记录在Zookeeper中 2. Consumer Group消费的每个Partition的Offset信息存放在什么位置
3. Topic的每个Partition存放在哪个Broker上的信息存放在哪里
4. Producer跟Zookeeper究竟有没有关系?没有关系!!!
//consumers、config、brokers、cont
- java OOM内存异常的四种类型及异常与解决方案
ronin47
java OOM 内存异常
OOM异常的四种类型:
一: StackOverflowError :通常因为递归函数引起(死递归,递归太深)。-Xss 128k 一般够用。
二: out Of memory: PermGen Space:通常是动态类大多,比如web 服务器自动更新部署时引起。-Xmx
- java-实现链表反转-递归和非递归实现
bylijinnan
java
20120422更新:
对链表中部分节点进行反转操作,这些节点相隔k个:
0->1->2->3->4->5->6->7->8->9
k=2
8->1->6->3->4->5->2->7->0->9
注意1 3 5 7 9 位置是不变的。
解法:
将链表拆成两部分:
a.0-&
- Netty源码学习-DelimiterBasedFrameDecoder
bylijinnan
javanetty
看DelimiterBasedFrameDecoder的API,有举例:
接收到的ChannelBuffer如下:
+--------------+
| ABC\nDEF\r\n |
+--------------+
经过DelimiterBasedFrameDecoder(Delimiters.lineDelimiter())之后,得到:
+-----+----
- linux的一些命令 -查看cc攻击-网口ip统计等
hotsunshine
linux
Linux判断CC攻击命令详解
2011年12月23日 ⁄ 安全 ⁄ 暂无评论
查看所有80端口的连接数
netstat -nat|grep -i '80'|wc -l
对连接的IP按连接数量进行排序
netstat -ntu | awk '{print $5}' | cut -d: -f1 | sort | uniq -c | sort -n
查看TCP连接状态
n
- Spring获取SessionFactory
ctrain
sessionFactory
String sql = "select sysdate from dual";
WebApplicationContext wac = ContextLoader.getCurrentWebApplicationContext();
String[] names = wac.getBeanDefinitionNames();
for(int i=0; i&
- Hive几种导出数据方式
daizj
hive数据导出
Hive几种导出数据方式
1.拷贝文件
如果数据文件恰好是用户需要的格式,那么只需要拷贝文件或文件夹就可以。
hadoop fs –cp source_path target_path
2.导出到本地文件系统
--不能使用insert into local directory来导出数据,会报错
--只能使用
- 编程之美
dcj3sjt126com
编程PHP重构
我个人的 PHP 编程经验中,递归调用常常与静态变量使用。静态变量的含义可以参考 PHP 手册。希望下面的代码,会更有利于对递归以及静态变量的理解
header("Content-type: text/plain");
function static_function () {
static $i = 0;
if ($i++ < 1
- Android保存用户名和密码
dcj3sjt126com
android
转自:http://www.2cto.com/kf/201401/272336.html
我们不管在开发一个项目或者使用别人的项目,都有用户登录功能,为了让用户的体验效果更好,我们通常会做一个功能,叫做保存用户,这样做的目地就是为了让用户下一次再使用该程序不会重新输入用户名和密码,这里我使用3种方式来存储用户名和密码
1、通过普通 的txt文本存储
2、通过properties属性文件进行存
- Oracle 复习笔记之同义词
eksliang
Oracle 同义词Oracle synonym
转载请出自出处:http://eksliang.iteye.com/blog/2098861
1.什么是同义词
同义词是现有模式对象的一个别名。
概念性的东西,什么是模式呢?创建一个用户,就相应的创建了 一个模式。模式是指数据库对象,是对用户所创建的数据对象的总称。模式对象包括表、视图、索引、同义词、序列、过
- Ajax案例
gongmeitao
Ajaxjsp
数据库采用Sql Server2005
项目名称为:Ajax_Demo
1.com.demo.conn包
package com.demo.conn;
import java.sql.Connection;import java.sql.DriverManager;import java.sql.SQLException;
//获取数据库连接的类public class DBConnec
- ASP.NET中Request.RawUrl、Request.Url的区别
hvt
.netWebC#asp.nethovertree
如果访问的地址是:http://h.keleyi.com/guestbook/addmessage.aspx?key=hovertree%3C&n=myslider#zonemenu那么Request.Url.ToString() 的值是:http://h.keleyi.com/guestbook/addmessage.aspx?key=hovertree<&
- SVG 教程 (七)SVG 实例,SVG 参考手册
天梯梦
svg
SVG 实例 在线实例
下面的例子是把SVG代码直接嵌入到HTML代码中。
谷歌Chrome,火狐,Internet Explorer9,和Safari都支持。
注意:下面的例子将不会在Opera运行,即使Opera支持SVG - 它也不支持SVG在HTML代码中直接使用。 SVG 实例
SVG基本形状
一个圆
矩形
不透明矩形
一个矩形不透明2
一个带圆角矩
- 事务管理
luyulong
javaspring编程事务
事物管理
spring事物的好处
为不同的事物API提供了一致的编程模型
支持声明式事务管理
提供比大多数事务API更简单更易于使用的编程式事务管理API
整合spring的各种数据访问抽象
TransactionDefinition
定义了事务策略
int getIsolationLevel()得到当前事务的隔离级别
READ_COMMITTED
- 基础数据结构和算法十一:Red-black binary search tree
sunwinner
AlgorithmRed-black
The insertion algorithm for 2-3 trees just described is not difficult to understand; now, we will see that it is also not difficult to implement. We will consider a simple representation known
- centos同步时间
stunizhengjia
linux集群同步时间
做了集群,时间的同步就显得非常必要了。 以下是查到的如何做时间同步。 在CentOS 5不再区分客户端和服务器,只要配置了NTP,它就会提供NTP服务。 1)确认已经ntp程序包: # yum install ntp 2)配置时间源(默认就行,不需要修改) # vi /etc/ntp.conf server pool.ntp.o
- ITeye 9月技术图书有奖试读获奖名单公布
ITeye管理员
ITeye
ITeye携手博文视点举办的9月技术图书有奖试读活动已圆满结束,非常感谢广大用户对本次活动的关注与参与。 9月试读活动回顾:http://webmaster.iteye.com/blog/2118112本次技术图书试读活动的优秀奖获奖名单及相应作品如下(优秀文章有很多,但名额有限,没获奖并不代表不优秀):
《NFC:Arduino、Andro