FasterRCNN源码解析(二)——读取解析PASCAL VOC2012数据集
读取解析PASCAL VOC2012数据集
文章目录
- 读取解析PASCAL VOC2012数据集
- 前言
- 一、认识数据集
-
- 1. Annotations文件夹
- 2.JPEGImages文件夹
- 3.ImageSets文件夹
- 4. pascal_voc_classes.json文件
- 二、代码解析
-
- 1.`__init__`
- 2.`__len__`
- 3.`__getitem__`
- 4.`get_height_and_width`
- 5.`parse_xml_to_dict`
- 6.`collate_fn`
- 三、应用代码
- 总结
前言
在我们训练网络的过程中,读取解析我们的数据集往往是第一步,由于本人刚开始学习深度学习机器学习不久,初次阅读该部分的代码里理解可能有些偏差,特将此记录下来,以便有新的理解和感悟。
本人将视频Faster RCNN源码解析(pytorch)p2进行一个总结整理,为以后的读取自己的数据集打下基础
一、认识数据集
在我们VOC2012文件夹中,主要由如下几个主要的文件夹,共1.83 GB

1. Annotations文件夹
其中Annotations文件夹中包含:17125个xml文件
我们打开其中一个xml文件,其主要信息有1.所属文件夹 2.文件名 3.文件源 4.图片大小 5.图片是否完整 6.图片中包含那几个类别(其中包括类别的名字,box的坐标等等)
我们需要将其中的有效信息提取出来,并与图片对应起来。

2.JPEGImages文件夹
该文件夹下就是我们上述xml文件所对应的图片信息。

3.ImageSets文件夹
其主要存储的是各个类别的文件名,训练集的文件名等
如在其main文件夹下的train.txt文件

4. pascal_voc_classes.json文件
该文件与读取解析PASCAL VOC2012数据集的代码在同一文件夹下,其目的在于使20个类别转化为数字类别,由于PASCAL VOC2012数据集有二十个类别,因此类别aeroplane为类别1,bicycle为2,以此类推。。。
之所以不从0开始是因为在网络分类的过程中还有背景的类别,默认为类别0。
二、代码解析
定义VOC2012DataSet类后,有5个方法,接下来依次介绍
1.__init__
其主要功能为
- 获取JPEGImages,Annotations文件家的路径
- 获取VOCdevkit/VOC2012/ImageSets/Main/train.txt下的所有文件名
- 合成xml_list(其中代表的是train.txt里的文件名对应在Annotations的xml文件)

- 读取pascal_voc_classes.json文件
代码如下:
from torch.utils.data import Dataset
import os
import torch
import json
from PIL import Image
from lxml import etree
class VOC2012DataSet(Dataset):
"""读取解析PASCAL VOC2012数据集"""
def __init__(self, voc_root, transforms, txt_name: str = "train.txt"):
# voc_root:训练集所在的根目录, transforms:预处理方法, txt_name: str = "train.txt":返回train.txt中的所有数据
self.root = os.path.join(voc_root, "VOCdevkit", "VOC2012")
self.img_root = os.path.join(self.root, "JPEGImages")
self.annotations_root = os.path.join(self.root, "Annotations")
# read train.txt or val.txt file
txt_path = os.path.join(self.root, "ImageSets", "Main", txt_name)
assert os.path.exists(txt_path), "not found {} file.".format(txt_name)
with open(txt_path) as read:
self.xml_list = [os.path.join(self.annotations_root, line.strip() + ".xml")
for line in read.readlines()]
# read class_indict
try:
json_file = open('./pascal_voc_classes.json', 'r')
self.class_dict = json.load(json_file)
except Exception as e:
print(e)
exit(-1)
self.transforms = transforms
2.__len__
获取 变量xml_list的长度,即训练集样本的数量
代码如下:
def __len__(self):
return len(self.xml_list)
3.__getitem__
获取 样本图片和标签
- 获取路径和标签信息
通过传入idx即索引,来获取该索引下的对应图片的xml文件所对应的路径。(其目的是为了获取标签数据)
采用parse_xml_to_dict方法对xml文件进行读取,存在变量data中,并以字典的形式进行存储, - 获取图片和打包标签
变量data中有图片的名称,以及各个目标框的位置即标签(这里需要注意的是从字典中读取的信息都是以字符形式存储的,我们需要将其转化为浮点型,并将其转化为tensor格式)
我们最后返回的是image和target(已经进行了数据预处理)
![]()

代码如下:
def __getitem__(self, idx):
# read xml
xml_path = self.xml_list[idx]
with open(xml_path) as fid:
xml_str = fid.read()
xml = etree.fromstring(xml_str) # etree包 读取xml文件
data = self.parse_xml_to_dict(xml)["annotation"]
img_path = os.path.join(self.img_root, data["filename"])
image = Image.open(img_path)
if image.format != "JPEG":
raise ValueError("Image format not JPEG")
boxes = []
labels = []
iscrowd = []
for obj in data["object"]:
xmin = float(obj["bndbox"]["xmin"])
xmax = float(obj["bndbox"]["xmax"])
ymin = float(obj["bndbox"]["ymin"])
ymax = float(obj["bndbox"]["ymax"]) # 字符型变量转化为浮点型变量
boxes.append([xmin, ymin, xmax, ymax])
labels.append(self.class_dict[obj["name"]])
iscrowd.append(int(obj["difficult"]))
# convert everything into a torch.Tensor 将这几个列表转化为tensor格式
boxes = torch.as_tensor(boxes, dtype=torch.float32)
labels = torch.as_tensor(labels, dtype=torch.int64)
iscrowd = torch.as_tensor(iscrowd, dtype=torch.int64)
image_id = torch.tensor([idx])
area = (boxes[:, 3] - boxes[:, 1]) * (boxes[:, 2] - boxes[:, 0])
target = {}
target["boxes"] = boxes
target["labels"] = labels
target["image_id"] = image_id
target["area"] = area
target["iscrowd"] = iscrowd
if self.transforms is not None:
image, target = self.transforms(image, target)
return image, target
4.get_height_and_width
获取 传入对应索引值的图片的高和宽,其操作步骤和上一个方法一样,同样需要将字符型转化为数字类型
返回图片的data_height, data_width
在 多GPU训练时需要这个方法,若没有这个方法,则会自动载入图片去计算图片的高和宽,会耗时也会占内存。
代码如下:
def get_height_and_width(self, idx):
# read xml
xml_path = self.xml_list[idx]
with open(xml_path) as fid:
xml_str = fid.read()
xml = etree.fromstring(xml_str)
data = self.parse_xml_to_dict(xml)["annotation"]
data_height = int(data["size"]["height"]) # 将字符型转化为数字类型
data_width = int(data["size"]["width"])
return data_height, data_width
5.parse_xml_to_dict
将xml文件解析成字典形式
代码如下:
def parse_xml_to_dict(self, xml):
"""
将xml文件解析成字典形式,参考tensorflow的recursive_parse_xml_to_dict
Args:
xml: xml tree obtained by parsing XML file contents using lxml.etree
Returns:
Python dictionary holding XML contents.
"""
if len(xml) == 0: # 遍历到底层,直接返回tag对应的信息
return {xml.tag: xml.text}
result = {}
for child in xml:
child_result = self.parse_xml_to_dict(child) # 递归遍历标签信息
if child.tag != 'object':
result[child.tag] = child_result[child.tag]
else:
if child.tag not in result: # 因为object可能有多个,所以需要放入列表里
result[child.tag] = []
result[child.tag].append(child_result[child.tag])
return {xml.tag: result}
6.collate_fn
这个是我们自己传入的分类方法,若不传入,其默认通过torch.stack()进行简单的拼接,因为这里并不是tensor格式,而是 元组tuple类型,该函数的目的是将 img和target 各自打包放在一起
def collate_fn(batch):
return tuple(zip(*batch))
batch原类型的数据为

经过collate_fn函数之后返回

三、应用代码
这一部分的内容主要是对前面定义的 VOC2012DataSet类 进行一个应用
我们先定义一个名为category_index的空字典。
然后打开pascal_voc_classes.json文件,并将索引作为键,类别名作为值传入category_index空字典中
import transforms
from draw_box_utils import draw_box
from PIL import Image
import json
import matplotlib.pyplot as plt
import torchvision.transforms as ts
import random
# read class_indict
category_index = {}
try:
json_file = open('./pascal_voc_classes.json', 'r')
class_dict = json.load(json_file)
category_index = {v: k for k, v in class_dict.items()}
except Exception as e:
print(e)
exit(-1)

定义 数据的预处理过程()
data_transform = {
"train": transforms.Compose([transforms.ToTensor(),
transforms.RandomHorizontalFlip(0.5)]),
"val": transforms.Compose([transforms.ToTensor()])
}
实例化VOC2012DataSet类 对象
# load train data set
train_data_set = VOC2012DataSet(os.getcwd(), data_transform["train"])
a = len(train_data_set)

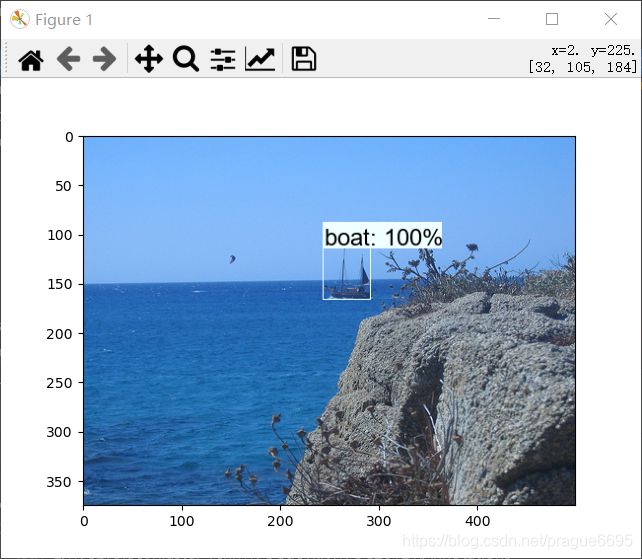
然后随机采样5张图片,通过VOC2012DataSet类的__getitem__方法返回img,target
然后通过ts.ToPILImage()(img)方法由tensor格式返回为PILImage格式
然后显示图像
for index in random.sample(range(0, len(train_data_set)), k=5):
img, target = train_data_set[index]
img = ts.ToPILImage()(img) # 由tensor格式返回为PILImage格式
draw_box(img,
target["boxes"].numpy(),
target["labels"].numpy(),
[1 for i in range(len(target["labels"].numpy()))],
category_index,
thresh=0.5,
line_thickness=1)
plt.imshow(img)
plt.show()
最后输出为
。。。
共5张图片
总结
对于读取解析数据的以上几个方法,有了清晰明了的一个认识,至于去如何使用还需要与fasterRCNN的源码配合使用,接下来的这几天我将会对fasterRCNN的源码进行学习,争取吃透,能够举一反三。