【Linux】【驱动】第一个相对完整的驱动编写
【Linux】【驱动】第一个相对完整的驱动编写
- 续
- 1.驱动部分的代码
- 2 app 代码
- 3 操作相关的代码
续
这个章节会讲述去直接控制一个GPIO,高低电平。
因为linux不允许直接去操作寄存器,所以在操作寄存器的时候就需要使用到函数:ioremap 和iounmap
来作为寄存器的声明和注销
ioremap 做为地址的声明,如下图使用
CCM_CCGR1 = ioremap(0x20C406C, 4);
iounmap 作为取消声明。
iounmap(CCM_CCGR1);
1.驱动部分的代码
- 在函数的前面对寄存器的名称进行了说明,
- misc_init 中实现对GPIO的配置, 使能 GPIO5,设置 GPIO5_IO03 用于 GPIO,设置 GPIO5_IO03 作为 output 引脚
- 在misc_write 中实现了对GPIO的控制
PS:此代码还有一些不完善的地方,所以在实际的使用中可能会出现一些异常,带之后改正
#include 2 app 代码
- 通过atoi 函数实现对命令框指令的读写,
- 通过write来是线对buf数字的传递
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
/*
* @description : main主程序
* @param - argc : argv数组元素个数
* @param - argv : 具体参数
* @return : 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd;
char buf[64] = {0};
//fd = open(argv[1], O_RDONLY);
fd = open("/dev/hello_misc", O_RDWR);
if(fd < 0)
{
perror("open error");
return fd;
}
buf[0] = atoi(argv[1]);
write(fd,buf,sizeof(buf));
close(fd);
return 0;
}
3 操作相关的代码
编译app 代码
arm-buildroot-linux-gnueabihf-gcc -o miscApp miscApp.c
编译驱动代码
make
清除驱动代码
make clean
挂载nfs
mount -t nfs -o nolock,vers=3 192.168.5.15:/home/book/nfs_rootfs /mnt
删除文件
rm -f + chrdevbase.ko
传递文件,将misc.ko 传到 /home/book/nfs_rootfs/
cp misc.ko /home/book/nfs_rootfs/
允许PrintK
echo "7 4 1 7"> /proc/sys/kernel/printk
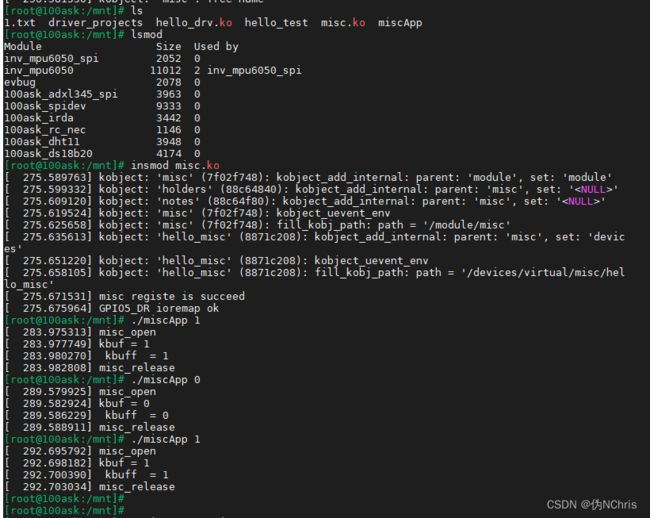
安装驱动
insmod misc.ko
列出驱动列表
lsmod
移除驱动
rmmod misc
给驱动传递数据1
./miscApp 1