MobileNet-v2网络框架
一、MobileNet-v2
MobileNetV2: Inverted Residuals and Linear Bottlenecks
- 论文链接:https://arxiv.org/abs/1801.04381
- 论文翻译:https://www.e-learn.cn/content/qita/675949
- 论文详解:https://www.cnblogs.com/darkknightzh/p/9410574.html
- 论文代码:https://github.com/tensorflow/models/tree/master/research/slim/nets/mobilenet
二、MobileNet算法
1、线性瓶颈层(linear bottlenecks)
MobileNet-v2使用了线性瓶颈层。因为当使用ReLU等激活函数时,会导致信息丢失。如下图所示,低维(2维)的信息嵌入到n维的空间中,并通过随机矩阵T对特征进行变换,之后再加上ReLU激活函数,之后在通过T-1进行反变换。当n=2,3时,会导致比较严重的信息丢失,部分特征重叠到一起了;当n=15到30时,信息丢失程度降低,但是变换矩阵已经是高度非凸的了。
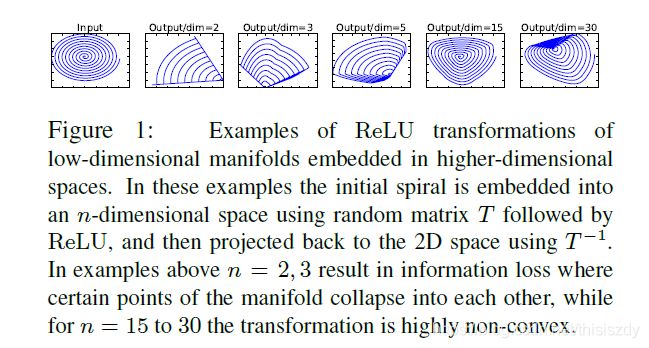
由于非线性层会毁掉一部分信息,因而非常有必要使用线性瓶颈层。且线性瓶颈层包含所有的必要信息,扩张层则是供非线性层丰富信息使用。

上图对比了不同的卷积方式:
- (a),传统卷积方式,输入和输出维度不一样,且卷积核直接对输入的红色立方体进行滤波;
- (b)为可分离卷积,左侧3×3卷积的每个卷积核只对输入的对应层进行滤波,此时特征维度不变;右边的1*1的卷积对特征进行升维或者降维(图中为升维)。
- (c)图中为带线性瓶颈层的可分离卷积,输入通过3×3 depthwise卷积+ReLU6,得到中间相同维度的特征。之后在通过1×1conv+ReLU6,得到降维后的特征(带斜线立方体)。之后在通过1×1卷积(无ReLU)进行升维。
- (d)图中则是维度比较低的特征,先通过1×1conv(无ReLU)升维,而后通过3×3 depthwise卷积+ReLU6保持特征数量不变,再通过1×1conv+ReLU6得到降维后的下一层特征;
2、Inverted residual block

上图为反转残差块(inverted residual block)。显示了传统的残差块和反转残差块的区别:
- 传统的残差块如(a)将高维特征先使用1×1conv降维,然后在使用3×3conv进行滤波,并使用1×1conv进行升维(这些卷积中均包含ReLU),得到输出特征(下一层的输入),并进行element wise的相加。
- 反转残差块则是将低维特征使用1×1conv升维(不含ReLU),而后使用3×3conv+ReLU对特征进行滤波,并使用1×1conv+ReLU对特征再降维,得到本层特征的输出,并进行element wise的相加。
反转的原因:瓶颈层的输入包含了所有的必要信息,因而右侧最左边的层后面不加ReLU,防止信息丢失。升维后,信息更加丰富,此时加上ReLU,之后在降维,理论上可以保持所有的必要信息不丢失。
为何使用ReLU? 使用ReLU可以增加模型的稀疏性。过于稀疏了,信息就丢失了。。。
那瓶颈层内部为何需要升维呢? 原因是为了增加模型的表达能力:当使用ReLU对某通道的信息进行处理后,该通道会不可避免的丢失信息;然而如果有足够多的通道的话,某通道丢失的信息,可能仍旧保留在其他通道中,因而才会在瓶颈层内部对特征进行升维。文中附录证明了,瓶颈层内部升维足够大时,能够抵消ReLU造成的信息丢失(如文中将特征维度扩大了6倍)。

瓶颈层的具体结构如上表所示。输入通过1×1的conv+ReLU层将维度从k维增加到tk维,之后通过3×3conv+ReLU可分离卷积对图像进行降采样(stride>1时),此时特征维度已经为tk维度,最后通过1×1conv(无ReLU)进行降维,维度从tk降低到k’维。
需要注意的是,除了整个模型中的第一个瓶颈层的t=1之外,其他瓶颈层t=6(论文中Table 2),即第一个瓶颈层内部并不对特征进行升维。
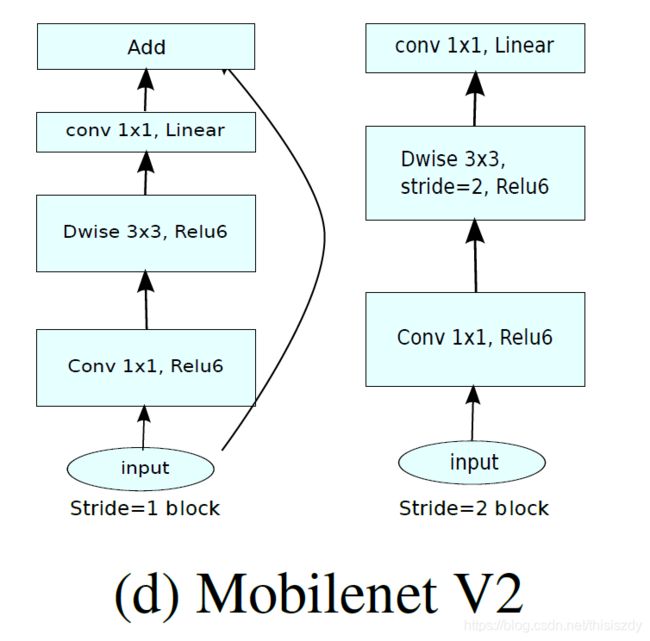
另外,对于瓶颈层,当stride=1时,才会使用elementwise 的sum将输入和输出特征连接(如上图左侧);stride=2时,无short cut连接输入和输出特征(上图右侧)。
3、网络模型
MobileNetV2的模型如下图所示,其中t为瓶颈层内部升维的倍数,c为特征的维数,n为该瓶颈层重复的次数,s为瓶颈层第一个conv的步幅。
需要注意的是:
- 当n>1时(即该瓶颈层重复的次数>1),只在第一个瓶颈层stride为对应的s,其他重复的瓶颈层stride均为1
- 只在stride=1时,输出特征尺寸和输入特征尺寸一致,才会使用elementwise sum将输出与输入相加
- 当n>1时,只在第一个瓶颈层特征维度为c,其他时候channel不变。
例如,对于该图中56²×24的那层,共有3个该瓶颈层,只在第一个瓶颈层使用stride=2,后两个瓶颈层stride=1;第一个瓶颈层由于输入和输出尺寸不一致,因而无short cut连接,后两个由于stride=1,输入输出特征尺寸一致,会使用short cut将输入和输出特征进行elementwise的sum;只在第一个瓶颈层最后的1×1conv对特征进行升维,后两个瓶颈层输出维度不变(不要和瓶颈层内部的升维弄混了)。
该层输入特征为56×56×24,第一个瓶颈层输出为28×28×32(特征尺寸降低,特征维度增加,无short cut),第二个、第三个瓶颈层输入和输出均为28×28×32(此时c=32,s=1,有short cut)。
另外,下表中还有一个k。MobileNetV1中提出了宽度缩放因子,其作用是在整体上对网络的每一层维度(特征数量)进行瘦身。MobileNetV2中,当该因子<1时,最后的那个1×1conv不进行宽度缩放;否则进行宽度缩放。

4、pytorch代码
import torch.nn as nn
import math
def conv_bn(inp, oup, stride):
return nn.Sequential(
nn.Conv2d(inp, oup, 3, stride, 1, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU6(inplace=True)
)
def conv_1x1_bn(inp, oup):
return nn.Sequential(
nn.Conv2d(inp, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
nn.ReLU6(inplace=True)
)
class InvertedResidual(nn.Module):
def __init__(self, inp, oup, stride, expand_ratio):
super(InvertedResidual, self).__init__()
self.stride = stride
assert stride in [1, 2]
self.use_res_connect = self.stride == 1 and inp == oup
self.conv = nn.Sequential(
# pw
nn.Conv2d(inp, inp * expand_ratio, 1, 1, 0, bias=False),
nn.BatchNorm2d(inp * expand_ratio),
nn.ReLU6(inplace=True),
# dw
nn.Conv2d(inp * expand_ratio, inp * expand_ratio, 3, stride, 1, groups=inp * expand_ratio, bias=False),
nn.BatchNorm2d(inp * expand_ratio),
nn.ReLU6(inplace=True),
# pw-linear
nn.Conv2d(inp * expand_ratio, oup, 1, 1, 0, bias=False),
nn.BatchNorm2d(oup),
)
def forward(self, x):
if self.use_res_connect:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV2(nn.Module):
def __init__(self, n_class=1000, input_size=224, width_mult=1.):
super(MobileNetV2, self).__init__()
# setting of inverted residual blocks
self.interverted_residual_setting = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
# building first layer
assert input_size % 32 == 0
input_channel = int(32 * width_mult)
self.last_channel = int(1280 * width_mult) if width_mult > 1.0 else 1280
self.features = [conv_bn(3, input_channel, 2)]
# building inverted residual blocks
for t, c, n, s in self.interverted_residual_setting:
output_channel = int(c * width_mult)
for i in range(n):
if i == 0:
self.features.append(InvertedResidual(input_channel, output_channel, s, t))
else:
self.features.append(InvertedResidual(input_channel, output_channel, 1, t))
input_channel = output_channel
# building last several layers
self.features.append(conv_1x1_bn(input_channel, self.last_channel))
self.features.append(nn.AvgPool2d(input_size/32))
# make it nn.Sequential
self.features = nn.Sequential(*self.features)
# building classifier
self.classifier = nn.Sequential(
nn.Dropout(),
nn.Linear(self.last_channel, n_class),
)
self._initialize_weights()
def forward(self, x):
x = self.features(x)
x = x.view(-1, self.last_channel)
x = self.classifier(x)
return x
def _initialize_weights(self):
for m in self.modules():
if isinstance(m, nn.Conv2d):
n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels
m.weight.data.normal_(0, math.sqrt(2. / n))
if m.bias is not None:
m.bias.data.zero_()
elif isinstance(m, nn.BatchNorm2d):
m.weight.data.fill_(1)
m.bias.data.zero_()
elif isinstance(m, nn.Linear):
n = m.weight.size(1)
m.weight.data.normal_(0, 0.01)
m.bias.data.zero_()