计算机视觉-卷积神经网络
目录
计算机视觉的发展历程
卷积神经网络
卷积(Convolution)
卷积计算
感受野(Receptive Field)
步幅(stride)
感受野(Receptive Field)
多输入通道、多输出通道和批量操作
卷积算子应用举例
计算机视觉作为一门让机器学会如何去“看”的学科,具体的说,就是让机器去识别摄像机拍摄的图片或视频中的物体,检测出物体所在的位置,并对目标物体进行跟踪,从而理解并描述出图片或视频里的场景和故事,以此来模拟人脑视觉系统。因此,计算机视觉也通常被叫做机器视觉,其目的是建立能够从图像或者视频中“感知”信息的人工系统。
计算机视觉技术经过几十年的发展,已经在交通(车牌识别、道路违章抓拍)、安防(人脸闸机、小区监控)、金融(刷脸支付、柜台的自动票据识别)、医疗(医疗影像诊断)、工业生产(产品缺陷自动检测)等多个领域应用,影响或正在改变人们的日常生活和工业生产方式。未来,随着技术的不断演进,必将涌现出更多的产品和应用,为我们的生活创造更大的便利和更广阔的机会。

图1:计算机视觉技术在各领域的应用
重点介绍计算机视觉的经典模型(卷积神经网络)和两个典型任务(图像分类和目标检测)。主要涵盖如下内容:
卷积神经网络:卷积神经网络(Convolutional Neural Networks, CNN)是计算机视觉技术最经典的模型结构。本教程主要介绍卷积神经网络的常用模块,包括:卷积、池化、激活函数、批归一化、丢弃法等。
-
图像分类:介绍图像分类算法的经典模型结构,包括:LeNet、AlexNet、VGG、GoogLeNet、ResNet,并通过眼疾筛查的案例展示算法的应用。
-
目标检测:介绍目标检测YOLOv3算法,并通过林业病虫害检测案例展示YOLOv3算法的应用。
计算机视觉的发展历程
计算机视觉的发展历程要从生物视觉讲起。对于生物视觉的起源,目前学术界尚没有形成定论。有研究者认为生物视觉产生于距今约5亿年前寒武纪。寒武纪生物大爆发的原因一直是个未解之谜,不过可以肯定的是在寒武纪动物具有了视觉能力,捕食者可以更容易地发现猎物,被捕食者也可以更早的发现天敌的位置。
视觉能力加剧了猎手和猎物之间的博弈,也催生出更加激烈的生存演化规则。视觉系统的形成有力地推动了食物链的演化,加速了生物进化过程,是生物发展史上重要的里程碑。经过几亿年的演化,目前人类的视觉系统已经具备非常高的复杂度和强大的功能,人脑中神经元数目达到了1000亿个,这些神经元通过网络互相连接,这样庞大的视觉神经网络使得我们可以很轻松的观察周围的世界,如 图2 所示。
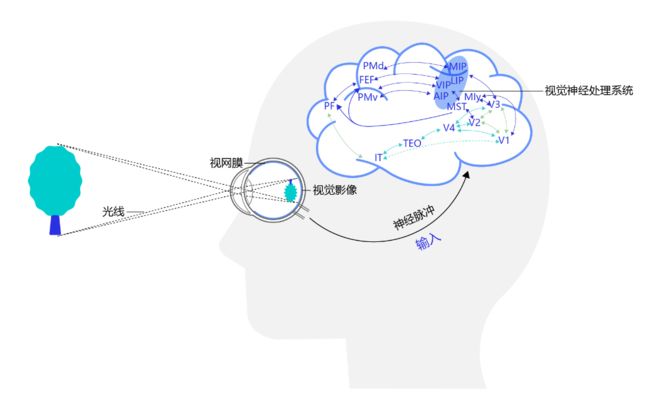
图2:人类视觉感知
对人类来说,识别猫和狗是件非常容易的事。但对计算机来说,即使是一个精通编程的高手,也很难轻松写出具有通用性的程序(比如:假设程序认为体型大的是狗,体型小的是猫,但由于拍摄角度不同,可能一张图片上猫占据的像素比狗还多)。那么,如何让计算机也能像人一样看懂周围的世界呢?研究者尝试着从不同的角度去解决这个问题,由此也发展出一系列的子任务,如 图3 所示。
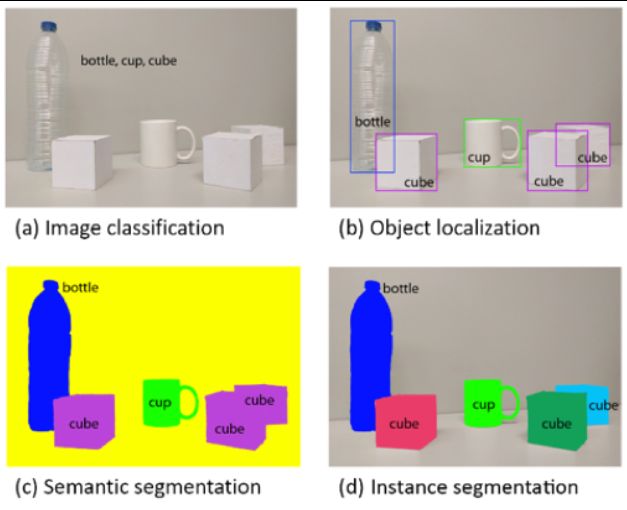
图3:计算机视觉子任务示意图
-
(a) Image Classification: 图像分类,用于识别图像中物体的类别(如:bottle、cup、cube)。
-
(b) Object Localization: 目标检测,用于检测图像中每个物体的类别,并准确标出它们的位置。
-
© Semantic Segmentation: 图像语义分割,用于标出图像中每个像素点所属的类别,属于同一类别的像素点用一个颜色标识。
-
(d) Instance Segmentation: 实例分割,值得注意的是,(b)中的目标检测任务只需要标注出物体位置,而(d)中的实例分割任务不仅要标注出物体位置,还需要标注出物体的外形轮廓。
在早期的图像分类任务中,通常是先人工提取图像特征,再用机器学习算法对这些特征进行分类,分类的结果强依赖于特征提取方法,往往只有经验丰富的研究者才能完成,如 图4 所示。
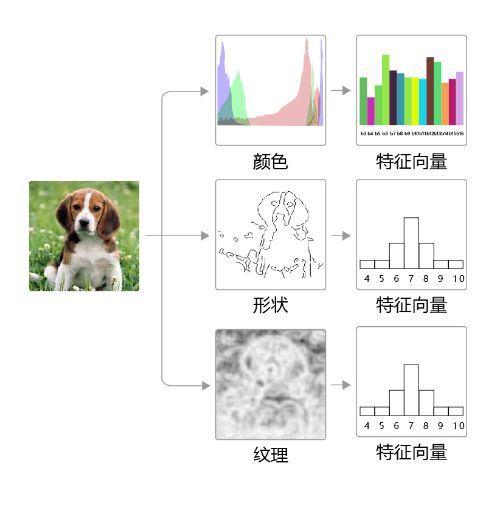
图4:早期的图像分类任务
在这种背景下,基于神经网络的特征提取方法应运而生。Yann LeCun是最早将卷积神经网络应用到图像识别领域的,
其主要逻辑是使用卷积神经网络提取图像特征
并对图像所属类别进行预测
通过训练数据不断调整网络参数
最终形成一套能自动提取图像特征并对这些特征进行分类的网络,如 图5 所示。
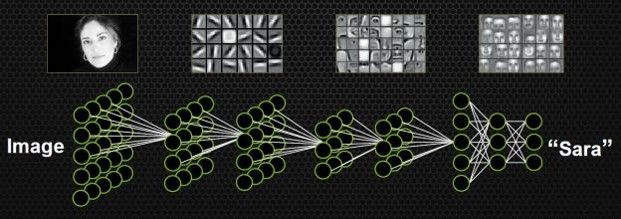
图5:早期的卷积神经网络处理图像任务示意
这一方法在手写数字识别任务上取得了极大的成功,但在接下来的时间里,却没有得到很好的发展。其主要原因一方面是数据集不完善,只能处理简单任务,在大尺寸的数据上容易发生过拟合;另一方面是硬件瓶颈,网络模型复杂时,计算速度会特别慢。
目前,随着互联网技术的不断进步,数据量呈现大规模的增长,越来越丰富的数据集不断涌现。另外,得益于硬件能力的提升,计算机的算力也越来越强大。不断有研究者将新的模型和算法应用到计算机视觉领域。由此催生了越来越丰富的模型结构和更加准确的精度,同时计算机视觉所处理的问题也越来越丰富,包括分类、检测、分割、场景描述、图像生成和风格变换等,甚至还不仅仅局限于2维图片,包括视频处理技术和3D视觉等。
卷积神经网络
卷积神经网络是目前计算机视觉中使用最普遍的模型结构,包括:
- 卷积(Convolution)
- 池化(Pooling)
- ReLU激活函数
- 批归一化(Batch Normalization)
- 丢弃法(Dropout)
我们介绍了手写数字识别任务,应用的是全连接网络进行特征提取,即将一张图片上的所有像素点展开成一个1维向量输入网络,存在如下两个问题:
1. 输入数据的空间信息被丢失。 空间上相邻的像素点往往具有相似的RGB值,RGB的各个通道之间的数据通常密切相关,但是转化成1维向量时,这些信息被丢失。同时,图像数据的形状信息中,可能隐藏着某种本质的模式,但是转变成1维向量输入全连接神经网络时,这些模式也会被忽略。
2. 模型参数过多,容易发生过拟合。 在手写数字识别案例中,每个像素点都要跟所有输出的神经元相连接。当图片尺寸变大时,输入神经元的个数会按图片尺寸的平方增大,导致模型参数过多,容易发生过拟合。
为了解决上述问题,我们引入卷积神经网络进行特征提取,既能提取到相邻像素点之间的特征模式,又能保证参数的个数不随图片尺寸变化。
图6 是一个典型的卷积神经网络结构,
多层卷积和池化层组合作用在输入图片上
在网络的最后通常会加入一系列全连接层
ReLU激活函数一般加在卷积或者全连接层的输出上
网络中通常还会加入Dropout来防止过拟合。
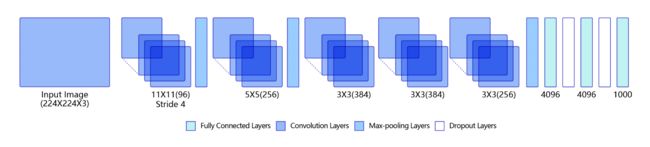
图6:卷积神经网络经典结构
说明:
在卷积神经网络中,计算范围是在像素点的空间邻域内进行的,卷积核参数的数目也远小于全连接层。卷积核本身与输入图片大小无关,它代表了对空间邻域内某种特征模式的提取。比如,有些卷积核提取物体边缘特征,有些卷积核提取物体拐角处的特征,图像上不同区域共享同一个卷积核。当输入图片大小不一样时,仍然可以使用同一个卷积核进行操作。
卷积(Convolution)
这一小节将为读者介绍卷积算法的原理和实现方案,并通过具体的案例展示如何使用卷积对图片进行操作,主要涵盖如下内容:
-
卷积计算
-
填充(padding)
-
步幅(stride)
-
感受野(Receptive Field)
-
多输入通道、多输出通道和批量操作
-
卷积算子应用举例
卷积计算
卷积是数学分析中的一种积分变换的方法
在图像处理中采用的是卷积的离散形式。这里需要说明的是,在卷积神经网络中,卷积层的实现方式实际上是数学中定义的互相关 (cross-correlation)运算
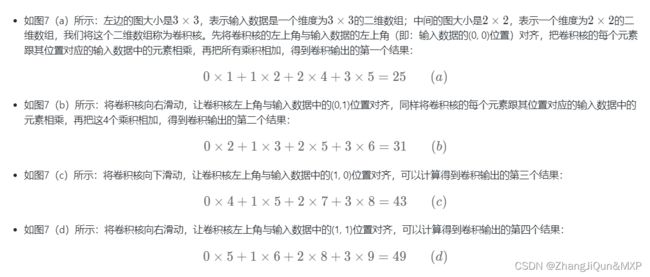
与数学分析中的卷积定义有所不同,这里跟其他框架和卷积神经网络的教程保持一致,都使用互相关运算作为卷积的定义,具体的计算过程如 图7 所示。

图7:卷积计算过程
说明:
卷积核(kernel)也被叫做滤波器(filter),假设卷积核的高和宽分别为kh和kw,则将称为kh×kw卷积,比如3×5卷积,就是指卷积核的高为3, 宽为5。

- 【思考】 当卷积核大小为3×33 \times 33×3时,bbb和aaa之间的对应关系应该是怎样的?
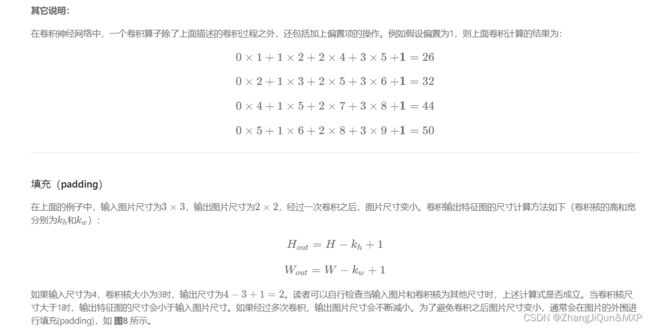
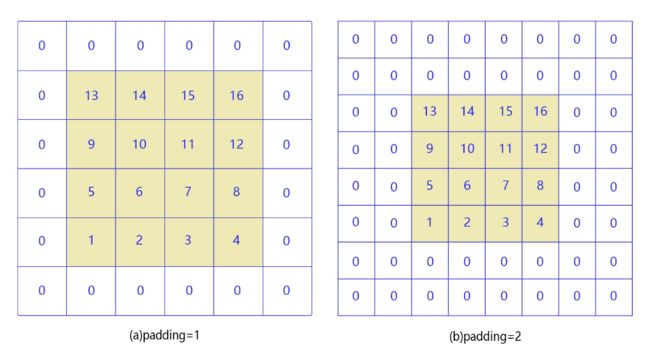
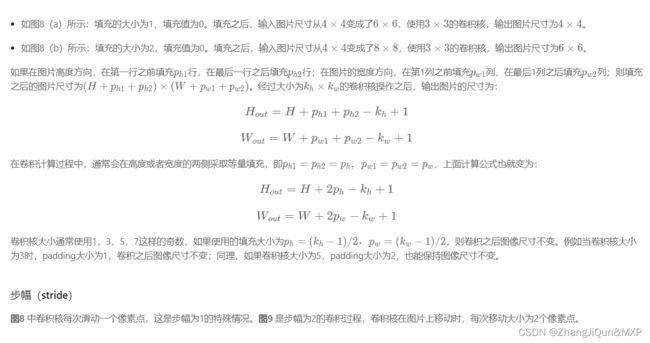
图8:图形填充
-
感受野(Receptive Field)
输出特征图上每个点的数值,是由输入图片上大小为kh×kwk_h\times k_wkh×kw的区域的元素与卷积核每个元素相乘再相加得到的,所以输入图像上kh×kwk_h\times k_wkh×kw区域内每个元素数值的改变,都会影响输出点的像素值。我们将这个区域叫做输出特征图上对应点的感受野。感受野内每个元素数值的变动,都会影响输出点的数值变化。比如3×33\times33×3卷积对应的感受野大小就是3×33\times33×3,如 图10 所示。

图10:感受野为3×3的卷积而当通过两层3×33\times33×3的卷积之后,感受野的大小将会增加到5×55\times55×5,如 图11 所示。
步幅(stride)
图8 中卷积核每次滑动一个像素点,这是步幅为1的特殊情况。图9 是步幅为2的卷积过程,卷积核在图片上移动时,每次移动大小为2个像素点。
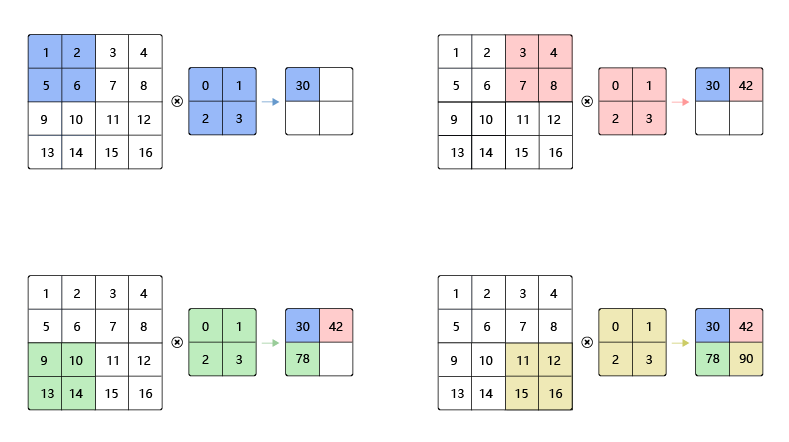
图9:步幅为2的卷积过程
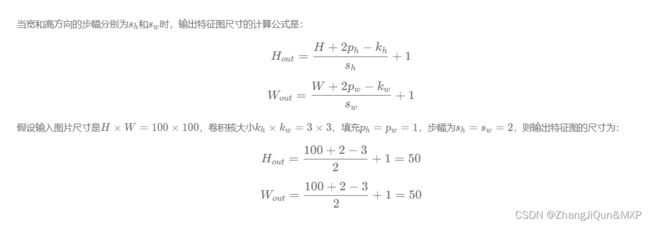
当宽和高方向的步幅分别为shs_hsh和sws_wsw时,输出特征图尺寸的计算公式是:
Hout=H+2ph−khsh+1H_{out} = \frac{H + 2p_h - k_h}{s_h} + 1Hout=shH+2ph−kh+1
Wout=W+2pw−kwsw+1W_{out} = \frac{W + 2p_w - k_w}{s_w} + 1Wout=swW+2pw−kw+1
假设输入图片尺寸是H×W=100×100H\times W = 100 \times 100H×W=100×100,卷积核大小kh×kw=3×3k_h \times k_w = 3 \times 3kh×kw=3×3,填充ph=pw=1p_h = p_w = 1ph=pw=1,步幅为sh=sw=2s_h = s_w = 2sh=sw=2,则输出特征图的尺寸为:
Hout=100+2−32+1=50H_{out} = \frac{100 + 2 - 3}{2} + 1 = 50Hout=2100+2−3+1=50
Wout=100+2−32+1=50W_{out} = \frac{100 + 2 - 3}{2} + 1 = 50Wout=2100+2−3+1=50
感受野(Receptive Field)
输出特征图上每个点的数值,是由输入图片上大小为kh×kwk_h\times k_wkh×kw的区域的元素与卷积核每个元素相乘再相加得到的,所以输入图像上kh×kwk_h\times k_wkh×kw区域内每个元素数值的改变,都会影响输出点的像素值。我们将这个区域叫做输出特征图上对应点的感受野。感受野内每个元素数值的变动,都会影响输出点的数值变化。比如3×33\times33×3卷积对应的感受野大小就是3×33\times33×3,如 图10 所示。
图10:感受野为3×3的卷积
而当通过两层3×33\times33×3的卷积之后,感受野的大小将会增加到5×55\times55×5,如 图11 所示。
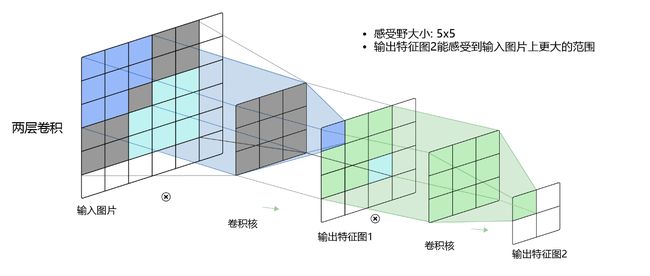
图11:感受野为5×5的卷积
因此,当增加卷积网络深度的同时,感受野将会增大,输出特征图中的一个像素点将会包含更多的图像语义信息。
多输入通道、多输出通道和批量操作
前面介绍的卷积计算过程比较简单,实际应用时,处理的问题要复杂的多。例如:对于彩色图片有RGB三个通道,需要处理多输入通道的场景。输出特征图往往也会具有多个通道,而且在神经网络的计算中常常是把一个批次的样本放在一起计算,所以卷积算子需要具有批量处理多输入和多输出通道数据的功能,下面将分别介绍这几种场景的操作方式。
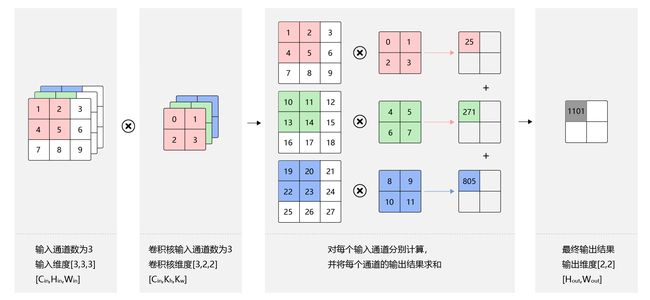
图12:多输入通道计算过程
- 多输出通道场景
一般来说,卷积操作的输出特征图也会具有多个通道CoutC_{out}Cout,这时我们需要设计CoutC_{out}Cout个维度为Cin×kh×kwC_{in}\times{k_h}\times{k_w}Cin×kh×kw的卷积核,卷积核数组的维度是Cout×Cin×kh×kwC_{out}\times C_{in}\times{k_h}\times{k_w}Cout×Cin×kh×kw,如 图13 所示。
- 对任一输出通道cout∈[0,Cout)c_{out} \in [0, C_{out})cout∈[0,Cout),分别使用上面描述的形状为Cin×kh×kwC_{in}\times{k_h}\times{k_w}Cin×kh×kw的卷积核对输入图片做卷积。
- 将这CoutC_{out}Cout个形状为Hout×WoutH_{out}\times{W_{out}}Hout×Wout的二维数组拼接在一起,形成维度为Cout×Hout×WoutC_{out}\times{H_{out}}\times{W_{out}}Cout×Hout×Wout的三维数组。
说明:
通常将卷积核的输出通道数叫做卷积核的个数。
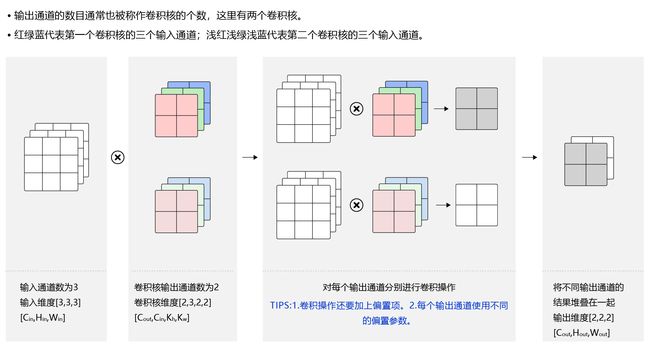
图13:多输出通道计算过程
- 批量操作
在卷积神经网络的计算中,通常将多个样本放在一起形成一个mini-batch进行批量操作,即输入数据的维度是N×Cin×Hin×WinN\times{C_{in}}\times{H_{in}}\times{W_{in}}N×Cin×Hin×Win。由于会对每张图片使用同样的卷积核进行卷积操作,卷积核的维度与上面多输出通道的情况一样,仍然是Cout×Cin×kh×kwC_{out}\times C_{in}\times{k_h}\times{k_w}Cout×Cin×kh×kw,输出特征图的维度是N×Cout×Hout×WoutN\times{C_{out}}\times{H_{out}}\times{W_{out}}N×Cout×Hout×Wout,如 图14 所示。
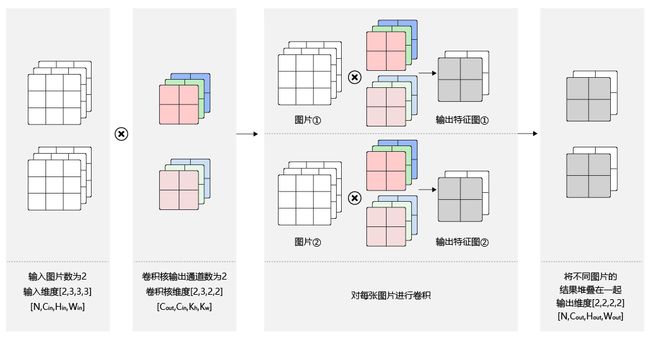
图14:批量操作
卷积算子应用举例
下面介绍卷积算子在图片中应用的三个案例,并观察其计算结果。
案例1——简单的黑白边界检测
下面是使用Conv2D算子完成一个图像边界检测的任务。图像左边为光亮部分,右边为黑暗部分,需要检测出光亮跟黑暗的分界处。
设置宽度方向的卷积核为[1,0,−1][1, 0, -1][1,0,−1],此卷积核会将宽度方向间隔为1的两个像素点的数值相减。当卷积核在图片上滑动时,如果它所覆盖的像素点位于亮度相同的区域,则左右间隔为1的两个像素点数值的差为0。只有当卷积核覆盖的像素点有的处于光亮区域,有的处在黑暗区域时,左右间隔为1的两个点像素值的差才不为0。将此卷积核作用到图片上,输出特征图上只有对应黑白分界线的地方像素值才不为0。具体代码如下所示,结果输出在下方的图案中。
import matplotlib.pyplot as plt
import numpy as np
import paddle
from paddle.nn import Conv2D
from paddle.nn.initializer import Assign
%matplotlib inline
# 创建初始化权重参数w
w = np.array([1, 0, -1], dtype='float32')
# 将权重参数调整成维度为[cout, cin, kh, kw]的四维张量
w = w.reshape([1, 1, 1, 3])
# 创建卷积算子,设置输出通道数,卷积核大小,和初始化权重参数
# kernel_size = [1, 3]表示kh = 1, kw=3
# 创建卷积算子的时候,通过参数属性weight_attr指定参数初始化方式
# 这里的初始化方式时,从numpy.ndarray初始化卷积参数
conv = Conv2D(in_channels=1, out_channels=1, kernel_size=[1, 3],
weight_attr=paddle.ParamAttr(
initializer=Assign(value=w)))
# 创建输入图片,图片左边的像素点取值为1,右边的像素点取值为0
img = np.ones([50,50], dtype='float32')
img[:, 30:] = 0.
# 将图片形状调整为[N, C, H, W]的形式
x = img.reshape([1,1,50,50])
# 将numpy.ndarray转化成paddle中的tensor
x = paddle.to_tensor(x)
# 使用卷积算子作用在输入图片上
y = conv(x)
# 将输出tensor转化为numpy.ndarray
out = y.numpy()
f = plt.subplot(121)
f.set_title('input image', fontsize=15)
plt.imshow(img, cmap='gray')
f = plt.subplot(122)
f.set_title('output featuremap', fontsize=15)
# 卷积算子Conv2D输出数据形状为[N, C, H, W]形式
# 此处N, C=1,输出数据形状为[1, 1, H, W],是4维数组
# 但是画图函数plt.imshow画灰度图时,只接受2维数组
# 通过numpy.squeeze函数将大小为1的维度消除
plt.imshow(out.squeeze(), cmap='gray')
plt.show()# 查看卷积层的权重参数名字和数值
print(conv.weight)
# 参看卷积层的偏置参数名字和数值
print(conv.bias)
案例2——图像中物体边缘检测
上面展示的是一个人为构造出来的简单图片,使用卷积网络检测图片明暗分界处的示例。对于真实的图片,也可以使用合适的卷积核(3*3卷积核的中间值是8,周围一圈的值是8个-1)对其进行操作,用来检测物体的外形轮廓,观察输出特征图跟原图之间的对应关系,如下代码所示:
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
import paddle
from paddle.nn import Conv2D
from paddle.nn.initializer import Assign
img = Image.open('./work/images/section1/000000098520.jpg')
# 设置卷积核参数
w = np.array([[-1,-1,-1], [-1,8,-1], [-1,-1,-1]], dtype='float32')/8
w = w.reshape([1, 1, 3, 3])
# 由于输入通道数是3,将卷积核的形状从[1,1,3,3]调整为[1,3,3,3]
w = np.repeat(w, 3, axis=1)
# 创建卷积算子,输出通道数为1,卷积核大小为3x3,
# 并使用上面的设置好的数值作为卷积核权重的初始化参数
conv = Conv2D(in_channels=3, out_channels=1, kernel_size=[3, 3],
weight_attr=paddle.ParamAttr(
initializer=Assign(value=w)))
# 将读入的图片转化为float32类型的numpy.ndarray
x = np.array(img).astype('float32')
# 图片读入成ndarry时,形状是[H, W, 3],
# 将通道这一维度调整到最前面
x = np.transpose(x, (2,0,1))
# 将数据形状调整为[N, C, H, W]格式
x = x.reshape(1, 3, img.height, img.width)
x = paddle.to_tensor(x)
y = conv(x)
out = y.numpy()
plt.figure(figsize=(20, 10))
f = plt.subplot(121)
f.set_title('input image', fontsize=15)
plt.imshow(img)
f = plt.subplot(122)
f.set_title('output feature map', fontsize=15)
plt.imshow(out.squeeze(), cmap='gray')
plt.show()
