步进及伺服调试中常见问题
步进及伺服调试中常见问题
- 步进
- 伺服
步进
1.步进电机驱动器可以接收两种脉冲信号:一种单脉冲方式、一种是双脉冲方式,可通过驱动器拨码开关设置进行选择。试分别画出两种方式的信号图?
单脉冲方式脉冲信号从脉冲端(PUL)输入,通过方向端(DIR)输入的高低电平来控制电机转动方向。方向端输入高电平,电机正转;方向端输入低电平,电机反转。
双脉冲方式脉冲信号可以从脉冲端输入,也可从方向端输入,通过改变脉冲信号输入的端口来控制电机转动方向。脉冲端输入脉冲信号,方向端保持无电流通过,电机正转;方向端输入脉冲信号,脉冲端保持无电流通过,电机反转。
单脉冲方式:

双脉冲方式:
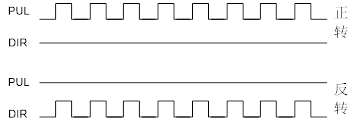
单脉冲方式信号图:
正转:(PUL输入脉冲信号,DIR为高电平)

反转:(PUL输入脉冲信号,DIR为低电平)
双脉冲方式信号图:
正转:(PUL端输入脉冲信号)
反转:(DIR端输入脉冲信号)
2.使能信号ENA有什么作用,应用在什么场合,试举例说明?使能信号释放多长时间后重新再发脉冲信号不会造成丢步?
使能信号ENA为低电平时,驱动器输入到电机的电流关断,电机处于自由状态。在一些自动化设备中,有时需要在通电状态下手动转动电机轴,这时可以将ENA信号置低,待手动调节好电机轴后再将ENA信号置高,使电机恢复受控状态。步进驱动器出现过压、过流或欠压等故障时,故障指示灯红灯亮,除了重新上电之外也可以通过重新使能清除故障,即可先将ENA信号置低,红灯灭,再将ENA信号置高,电机恢复受控状态。
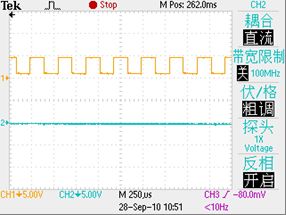
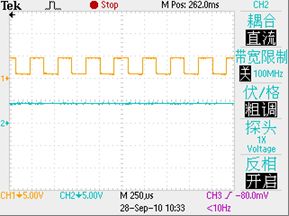
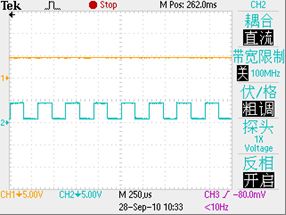
下图中黄色为绕组电流波形,蓝色为ENA信号波形:
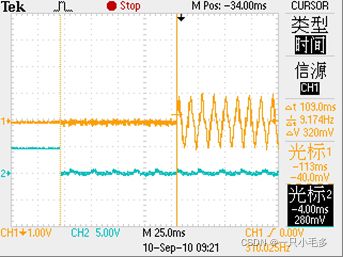
ENA信号作用时,电机处于自由状态,绕组中无电流通过。释放ENA信号后,隔109ms可再发脉冲信号。
3.驱动器M542配57系列电机,当电机转速为15rps时,试分析绕组中的电流波形。转速为1rps、5rps、10rps时电流波形会有何不同?(雷赛系列)
电机运行时满足一个重要公式:
U = E + I ⋅ R + L d i d t U=E+I⋅R+L \frac{di}{dt} U=E+I⋅R+Ldtdi
其中I为绕组电流,E为反电动势。反电动势与电机转速成正比,电机转速越高,反电动势就越大,从而导致实际加在电机绕组上的电流下降。
电机8线并联接法,设置驱动器细分数为1600,峰值电流2.84A。
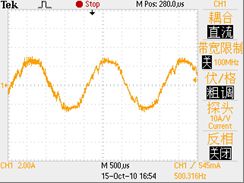
1rps:
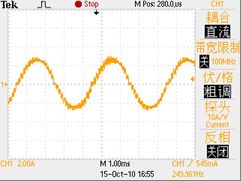
5rps:
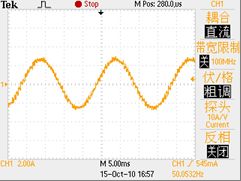
10rps:
15rps:

在低速时,电机绕组电流波形是标准的正弦波,幅值为2.8A左右。但随着转速的增加电流波形明显偏离正弦波,而且幅值降低很快,在15rps时,电流幅值降低到2A以下。
4.变压器功率选择:
- 驱动器M860配86HS45电机,需要选择多大功率变压器合适?(雷赛系列)
变压器功率的选择可以使用下面的公式计算:
P = P m a x K η P=\frac {P{_{max}}} {K\eta} P=KηPmax
其中 P m a x P{_{max}} Pmax为步进电机的极限输出功率;η为效率,一般取0.80-0.95;K为比例系数,一般取1.5-2.0。 P m a x P{_{max}} Pmax等于驱动器工作电压和电机绕组静态电流的乘积, P m a x P{_{max}} Pmax和K的商近似趋近于电机的最大功率。
驱动器M860的工作电压范围为24~68VDC,假定为60V。86HS45电机的额定电流为4.2A。则变压器的功率为:
P = 4.2 ⋅ 60 0.8 ⋅ 2 = 158 ( W ) P=\frac{4.2⋅60}{0.8⋅2}=158(W) P=0.8⋅24.2⋅60=158(W)
选用输出功率大于158W规格的变压器可满足要求。 - 原用200W/36V的变压器,改用300W/36V之后,对驱动器的高速性能有何影响?
使用200W/36V的变压器,在中高速时,可能存在变压器输出电压压降较大,电机力不够的情况,且变压器中电流上升的较快,发热较多。改用300W/36V的变压器可改善这一现象,提升驱动器的高速性能。
5.驱动器控制信号的接线方式有共阳极、共阴极、差分三种方式,分别画出它们的接线示意图。差分信号有什么优点?,画出它的输出脉冲信号波形。在差分方式下使用到的常见IC 有哪些型号?
共阳极接法:
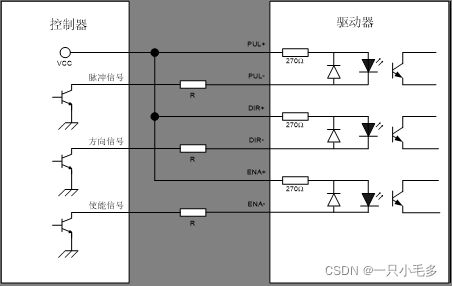
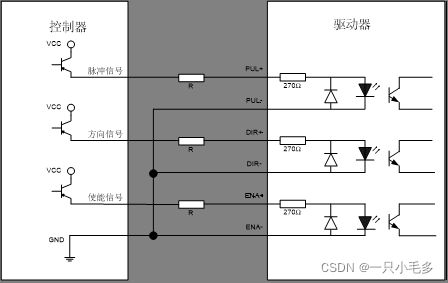
共阴极接法:
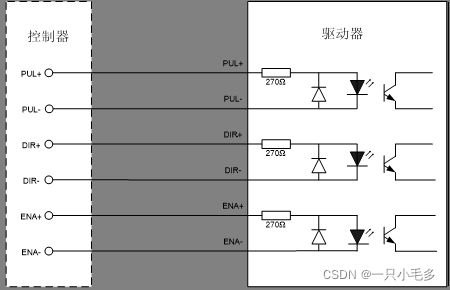
差分式接法:
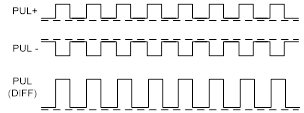
差分输入信号的波形为:
差分信号与单端信号比较的优点是:差分信号的抗干扰性强,对EMI高度免疫,且容易识别小信号。和单端信号不同,差分信号使用一对导线代替单根导线传输信号,有效信号为两个输入端的输入信号的差值。当存在干扰信号时,干扰信号会对两个输入信号产生相同的干扰作用,通过对两个输入端信号求差,可以有效的降低干扰的影响,达到共模抑制的目的。
差分方式下常使用到的驱动芯片有AM26LS31(单端信号转差分信号)、AM26LS32(差分信号转单端信号)等。
6.分别画出比较器、运放、霍尔元件的输出电路。画出同相、反相运放的电路图。如何计算运算放大器的放大倍数?
比较器:比较器实际上是工作在开环状态下的运算放大器,它是用来比较两个电压大小的器件。下图中,上图为差分运算放大电路,下图为比较器示意图。
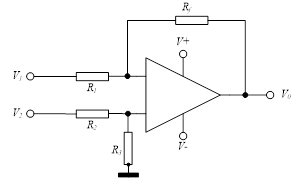
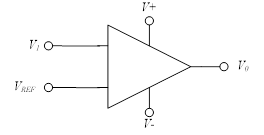
当差分运算放大器满足 R f = R 3 = ∞ R_f=R_3=∞ Rf=R3=∞, R 1 = R 2 = 0 R_1=R_2=0 R1=R2=0时即为比较器, V R E F V_{REF} VREF为参考电压, V 1 V_1 V1为输入电压, V 0 V_0 V0为输出电压。它的输出特性曲线为:

V 1 < V R E F V_1
运放:下图为理想集成运算放大器的模型图。
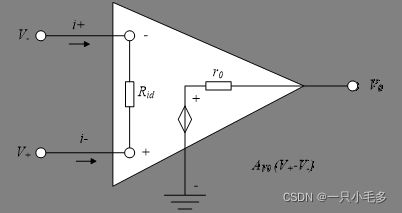
对于理想运放而言,有 i + = i − = 0 i+ = i- = 0 i+=i−=0,即正负输入端之间“虚断”;V- = V+ ,即正负输入端之间“虚短”。运算放大器的放大倍数可根据其“虚短”和“虚断”这两个特征进行推导。 A V 0 A_{V0} AV0为开环增益,理论上为无穷大,输出电压 V 0 = A V 0 ( V + − V − ) V0 = A_{V0}(V_+ - V_-) V0=AV0(V+−V−)。运算放大器的输出特性曲线为:

其中, U O M U_{OM} UOM为运放可输出的最大电压。
霍尔元件: 霍尔元件的输出端为三极管集电极开路输出,所以检测霍尔元件时,输出端需接上拉电阻。
同相运放电路图:
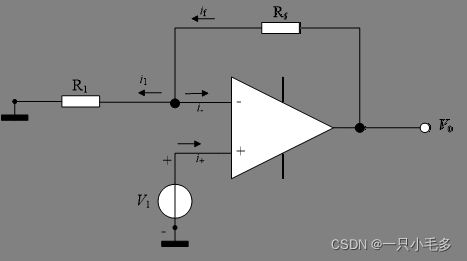
放大倍数: A = V 0 V 1 = 1 + R f R 1 A=\frac {V_0}{V_1} =1+\frac {R_f}{R_1} A=V1V0=1+R1Rf
反相运放电路图:

放大倍数: A = V 0 V 1 = − R f R 1 A=\frac {V_0}{V_1} =-\frac {R_f}{R_1} A=V1V0=−R1Rf
7.驱动器半流功能的原理和作用?
当停发脉冲信号约0.4s后,电机进入半流状态,即工作电流减半(实际为60%左右),这样可以使得驱动器和电机的发热降低,可靠性提高。在电机需要经常启停的场合半流功能的效果更为明显。
8.PLC的驱动信号电平为24V,而驱动器的信号电平为5V,需要串联多大的电阻才能保证驱动器正常工作?
在控制器信号端串联一个2kΩ的电阻可以保证驱动器正常工作。此电阻可以起到限流分压的作用。
9.两相、三相电机旋转一圈会产生多少个正弦波?
电机每旋转一个齿距角对应A、B两相绕组完成一个通断周期,即产生一个正弦波,所以电机旋转一圈产生的正弦波数应该与转子齿数一致。典型的两相、三相步进电机一般为50齿,对应电机旋转一圈产生的正弦波数应为50个。
设定电机转速为1r/s。

正弦波周期为20ms,每秒产生50个正弦波。

正弦波周期为20ms,每秒产生50个正弦波。
10.步进电机中高速时,如果力矩偏小,应如何解决?
步进电机在中高速时,如果力矩上不去,在条件允许情况下,首先应当选择增大供电电压,由于绕组电感会形成反电动势,且反电动势随着转速的升高而增大,实际加在电机上的工作电流会减小,从而导致力矩下降,增大电压,可以减少反电动势的影响,增大绕组的实际工作电流,提高电机的力矩。另外,在实际应用中,如果力矩只是稍稍偏小,则可以小范围调低驱动电流,这样可能有意想不到的效果。
步进驱动器、步进电机的温度偏高,应如何调整?
在正常使用情况下,驱动器、电机温度偏高时,可以考虑以下调整方式:
1) 如果驱动器处在全流模式,可以改为自动半流模式;
2) 如果电机转速不高,可以降低驱动器的供电电压;
3) 在负载力矩允许范围内,适当调低驱动器的驱动电流;
4) 更换低铁损的硅钢片,选用高效率的电机;
5) 加装散热装置,强制散热。
11.分析对比步进和伺服的优缺点?
为闭环控制,驱动器可以从编码器中获得反馈信号,内部构成位置环和速度环,控制性能更为可靠。
但是在一些对高速,加速减速要求不是很高的低功率(0.75W以下)场合,步进系统也有自己的优势,步进系统出现更早,技术更为纯熟,且体积小、操作简单、价格便宜,采用细分技术后,在这些场合的实际应用中其定位精度已接近伺服系统。因此,对于控制性能要求不高的应用场合,步进相比伺服仍然有独到的竞争力。
伺服
12.伺服系统稳速精度不高,首先应该调节什么参数?
电机停止前跟踪误差超调较大一般是由于速度过冲导致。适当调节速度环Vi可以减小速度控制误差,消除速度过冲。在系统稳定的条件下增大位置环Kd也可以抑制误差,提高控制精度。
13.200W的交流伺服电机,额定电压为36V。分析使用24V和48V的电源会有什么问题和不同?
原则上使用超过额定电压的直流电源不存在什么问题,但当电源为48V时,电机的温度更高,长时间使用的情况下会缩短电机的寿命;当电源为24V时,在中高速下可能出现电机力矩不够的情况。
14.某伺服电机额定转速为3000r/min,伺服电机的每圈所需脉冲数为8000pulse/rev,上位机可输出的极限脉冲频率为200kHz,如果希望电机达到额定转速,应如何设置电子齿轮比。
当上位机输入脉冲频率为200kHz时,伺服电机的转速为:
200000 ÷ 8000 × 60 = 1500 ( r / m i n ) 200000÷8000×60 = 1500(r/min) 200000÷8000×60=1500(r/min) 1500 × ( 分 子 / 分 母 ) = 3000 ( r / m i n ) 1500×(分子/分母)= 3000(r/min) 1500×(分子/分母)=3000(r/min)
可设置分子为2,分母为1。