Hands on RL 之 Off-policy Maximum Entropy Actor-Critic (SAC)
Hands on RL 之 Off-policy Maximum Entropy Actor-Critic (SAC)
文章目录
- Hands on RL 之 Off-policy Maximum Entropy Actor-Critic (SAC)
-
- 1. 理论基础
-
- 1.1 Maximum Entropy Reinforcement Learning, MERL
- 1.2 Soft Policy Evaluation and Soft Policy Improvement in SAC
- 1.3 Two Q Value Neural Network
- 1.4 Tricks
- 1.5 Pesudocode
- 2. 代码实现
-
- 2.1 SAC处理连续动作空间
- 2.2 SAC处理离散动作空间
- Reference
Soft actor-critic方法又被称为Off-policy maximum entropy actor-critic algorithm。
1. 理论基础
1.1 Maximum Entropy Reinforcement Learning, MERL
在MERL原论文中,引入了熵的概念,熵定义如下:
随机变量 x x x符合 P P P的概率分布,那么随机变量 x x x的熵 H ( P ) \mathcal{H}(P) H(P)为
H ( P ) = E x ∼ P [ − log p ( x ) ] \mathcal{H}(P)=\mathbb{E}_{x\sim P}[-\log p(x)] H(P)=Ex∼P[−logp(x)]
标准的RL算法的目标是能够找到最大化累计收益的策略
π std ∗ = arg max π ∑ t E ( s t , a t ) ∼ ρ π [ r ( s t , a t ) ] \pi^*_{\text{std}} = \arg \max_\pi \sum_t \mathbb{E}_{(s_t,a_t)\sim \rho_\pi}[r(s_t, a_t)] πstd∗=argπmaxt∑E(st,at)∼ρπ[r(st,at)]
引入了熵最大化的RL算法的目标是
π M E R L ∗ = arg max π ∑ t E ( s t , a t ) ∼ ρ π [ r ( s t , a t ) + α H ( π ( ⋅ ∣ s t ) ) ] \pi^*_{MERL} = \arg\max_\pi \sum_t \mathbb{E}_{(s_t,a_t)\sim\rho_\pi}[r(s_t,a_t) + \alpha \mathcal{H}(\pi(\cdot|s_t))] πMERL∗=argπmaxt∑E(st,at)∼ρπ[r(st,at)+αH(π(⋅∣st))]
其中, ρ π \rho_\pi ρπ表示在策略 π \pi π下状态空间对的概率分布, α \alpha α是温度系数,用于调节对熵的重视程度。
类似的,我们也可以在RL的动作值函数,和状态值函数中同样引入熵的概念。
标准的RL算法的值函数
standard Q function: Q π ( s , a ) = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t r ( s t , a t ) ∣ s 0 = s , a 0 = a ] standard V function: V π ( s ) = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t r ( s t , a t ) ∣ s 0 = s ] \begin{aligned} \text{standard Q function:} \quad Q^\pi(s,a) & = \mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t r(s_t,a_t)|s_0=s, a_0=a] \\ \text{standard V function:} \quad V^\pi(s) & =\mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t r(s_t,a_t)|s_0=s] \end{aligned} standard Q function:Qπ(s,a)standard V function:Vπ(s)=Est,at∼ρπ[t=0∑∞γtr(st,at)∣s0=s,a0=a]=Est,at∼ρπ[t=0∑∞γtr(st,at)∣s0=s]
根据MERL的目标函数,在值函数中引入熵的概念之后就获得了Soft Value Function, SVF
Soft Q function: Q soft π ( s , a ) = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t r ( s t , a t ) + α ∑ t = 1 ∞ γ t H ( π ( ⋅ ∣ s t ) ) ∣ s 0 = s , a 0 = a ] Soft V function: V soft π ( s ) = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t ( r ( s t , a t ) + α H ( π ( ⋅ ∣ s t ) ) ) ∣ s 0 = s ] \begin{aligned} \text{Soft Q function:} \quad Q_{\text{soft}}^\pi(s,a) & = \mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t r(s_t,a_t) + \alpha \sum_{t=1}^\infty\gamma^t\mathcal{H} (\pi(\cdot|s_t)) |s_0=s, a_0=a] \\ \text{Soft V function:} \quad V_{\text{soft}}^\pi(s) & =\mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t \Big( r(s_t,a_t) + \alpha \mathcal{H} (\pi(\cdot|s_t)) \Big)|s_0=s] \end{aligned} Soft Q function:Qsoftπ(s,a)Soft V function:Vsoftπ(s)=Est,at∼ρπ[t=0∑∞γtr(st,at)+αt=1∑∞γtH(π(⋅∣st))∣s0=s,a0=a]=Est,at∼ρπ[t=0∑∞γt(r(st,at)+αH(π(⋅∣st)))∣s0=s]
观察上式我们就可以获得Soft Bellman Equation
Q soft π ( s , a ) = E s ′ ∼ p ( s ′ ∣ s , a ) a ′ ∼ π [ r ( s , a ) + γ ( Q soft π ( s ′ , a ′ ) + α H ( π ( ⋅ ∣ s ′ ) ) ) ] = E s ′ ∼ p ( s ′ ∣ s , a ) [ r ( s , a ) + γ V soft π ( s ) ] \begin{aligned} Q_{\text{soft}}^\pi(s,a) & = \mathbb{E}_{s^\prime \sim p(s^\prime|s,a)\\ a^\prime\sim \pi}[r(s,a) + \gamma \Big( Q_{\text{soft}}^\pi(s^\prime,a^\prime) + \alpha \mathcal{H}(\pi(\cdot|s^\prime)) \Big)] \\ & = \mathbb{E}_{s^\prime\sim p(s^\prime|s,a)} [r(s,a) + \gamma V_{\text{soft}}^\pi(s)] \end{aligned} Qsoftπ(s,a)=Es′∼p(s′∣s,a)a′∼π[r(s,a)+γ(Qsoftπ(s′,a′)+αH(π(⋅∣s′)))]=Es′∼p(s′∣s,a)[r(s,a)+γVsoftπ(s)]
V soft π ( s ) = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t ( r ( s t , a t ) + α H ( π ( ⋅ ∣ s t ) ) ) ∣ s 0 = s ] = E s t , a t ∼ ρ π [ ∑ t = 0 ∞ γ t r ( s t , a t ) + α ∑ t = 1 ∞ γ t H ( π ( ⋅ ∣ s t ) ) + α H ( π ( ⋅ ∣ s t ) ∣ s 0 = s ] = E s t , a t ∼ ρ π [ Q soft π ( s , a ) ∣ s 0 = s , a 0 = a ] + α H ( π ( ⋅ ∣ s t ) ) = E a ∼ π [ Q soft π ( s , a ) − α log π ( a ∣ s ) ] \begin{aligned} V_{\text{soft}}^\pi(s) & = \mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t \Big( r(s_t,a_t) + \alpha \mathcal{H} (\pi(\cdot|s_t)) \Big)|s_0=s] \\ & = \mathbb{E}_{s_t,a_t\sim\rho_\pi}[\sum_{t=0}^\infty \gamma^t r(s_t,a_t) + \alpha \sum_{t=1}^\infty\gamma^t\mathcal{H} (\pi(\cdot|s_t)) + \alpha \mathcal{H}(\pi(\cdot|s_t)|s_0=s] \\ & = \mathbb{E}_{s_t,a_t\sim\rho_\pi}[Q_{\text{soft}}^\pi(s,a)|s_0=s,a_0=a] + \alpha \mathcal{H}(\pi(\cdot|s_t)) \\ & = \textcolor{blue}{\mathbb{E}_{a\sim\pi}[Q_{\text{soft}}^\pi(s,a) - \alpha \log \pi(a|s)]} \end{aligned} Vsoftπ(s)=Est,at∼ρπ[t=0∑∞γt(r(st,at)+αH(π(⋅∣st)))∣s0=s]=Est,at∼ρπ[t=0∑∞γtr(st,at)+αt=1∑∞γtH(π(⋅∣st))+αH(π(⋅∣st)∣s0=s]=Est,at∼ρπ[Qsoftπ(s,a)∣s0=s,a0=a]+αH(π(⋅∣st))=Ea∼π[Qsoftπ(s,a)−αlogπ(a∣s)]
1.2 Soft Policy Evaluation and Soft Policy Improvement in SAC
soft Q function的值迭代公式
Q soft π ( s , a ) = E s ′ ∼ p ( s ′ ∣ s , a ) a ′ ∼ π [ r ( s , a ) + γ ( Q soft π ( s ′ , a ′ ) + α H ( π ( ⋅ ∣ s ′ ) ) ) ] = E s ′ ∼ p ( s ′ ∣ s , a ) [ r ( s , a ) + γ V soft π ( s ) ] \begin{align} Q_{\text{soft}}^\pi(s,a) & = \mathbb{E}_{s^\prime \sim p(s^\prime|s,a)\\ a^\prime\sim \pi}[r(s,a) + \gamma \Big( Q_{\text{soft}}^\pi(s^\prime,a^\prime) + \alpha \mathcal{H}(\pi(\cdot|s^\prime)) \Big)] \tag{1.1} \\ & = \mathbb{E}_{s^\prime\sim p(s^\prime|s,a)} [r(s,a) + \gamma V_{\text{soft}}^\pi(s)] \tag{1.2} \end{align} Qsoftπ(s,a)=Es′∼p(s′∣s,a)a′∼π[r(s,a)+γ(Qsoftπ(s′,a′)+αH(π(⋅∣s′)))]=Es′∼p(s′∣s,a)[r(s,a)+γVsoftπ(s)](1.1)(1.2)
soft V function的值迭代公式
V soft π ( s ) = E a ∼ π [ Q soft π ( s , a ) − α log π ( a ∣ s ) ] (1.3) V_{\text{soft}}^\pi(s)= \mathbb{E}_{a\sim\pi}[Q_{\text{soft}}^\pi(s,a) - \alpha \log \pi(a|s)] \tag{1.3} Vsoftπ(s)=Ea∼π[Qsoftπ(s,a)−αlogπ(a∣s)](1.3)
在SAC中如果我们只打算维持一个Q值函数,那么使用式子 ( 1 , 1 ) (1,1) (1,1)进行值迭代即可,
如果需要同时维持Q,V两个函数,那么使用式子 ( 1 , 2 ) , ( 1 , 3 ) (1,2),(1,3) (1,2),(1,3)进行值迭代。
下面直接给出训练中的损失函数
V值函数的损失函数
J V ( ψ ) = E s t ∼ D [ 1 2 ( V ψ ( s t ) − E a t ∼ π ϕ [ Q θ ( s t , a t ) − log π ϕ ( a t ∣ s t ) ] ) 2 ] J_{V(\psi)} = \mathbb{E}_{s_t\sim\mathcal{D}} \Big[\frac{1}{2}(V_{\psi}(s_t) - \mathbb{E}_{a_t\sim\pi_{\phi}}[Q_\theta(s_t,a_t)- \log \pi_\phi(a_t|s_t)])^2 \Big] JV(ψ)=Est∼D[21(Vψ(st)−Eat∼πϕ[Qθ(st,at)−logπϕ(at∣st)])2]
Q值函数的损失函数
J Q ( θ ) = E ( s t , a t ) ∼ D [ 1 2 ( Q θ ( s t , a t ) − Q ^ ( s t , a t ) ) ] Q ^ ( s t , a t ) = r ( s t , a t ) + γ E s t + 1 ∼ p [ V ψ ( s t + 1 ) ] Q ^ ( s t , a t ) = r ( s t , a t ) + γ Q θ ( s t + 1 , a t + 1 ) J_{Q(\theta)} = \mathbb{E}_{(s_t,a_t)\sim\mathcal{D}} \Big[ \frac{1}{2}\Big( Q_\theta(s_t,a_t) - \hat{Q}(s_t,a_t) \Big) \Big] \\ \hat{Q}(s_t,a_t) = r(s_t,a_t) + \gamma \mathbb{E}_{s_{t+1}\sim p}[V_{\psi}(s_{t+1})] \\ \hat{Q}(s_t,a_t) = r(s_t,a_t) + \gamma Q_\theta(s_{t+1},a_{t+1}) JQ(θ)=E(st,at)∼D[21(Qθ(st,at)−Q^(st,at))]Q^(st,at)=r(st,at)+γEst+1∼p[Vψ(st+1)]Q^(st,at)=r(st,at)+γQθ(st+1,at+1)
策略 π \pi π的损失函数
J π ( ϕ ) = E s t ∼ D [ D K L ( π ϕ ( ⋅ ∣ s t ) ∣ ∣ exp ( Q θ ( s t , ⋅ ) ) Z θ ( s t ) ) ] J_\pi(\phi) = \mathbb{E}_{s_t\sim \mathcal{D}} \Big[ \mathbb{D}_{KL}\Big( \pi_\phi(\cdot|s_t) \big|\big| \frac{\exp(Q_\theta(s_t,\cdot))}{Z_\theta(s_t)} \Big) \Big] Jπ(ϕ)=Est∼D[DKL(πϕ(⋅∣st) Zθ(st)exp(Qθ(st,⋅)))]
其中, Z θ ( s t ) Z_\theta(s_t) Zθ(st)是分配函数 (partition function)
KL散度的定义如下
假设对随机变量 ξ \xi ξ,存在两个概率分布P和Q,其中P是真实的概率分布,Q是较容易获得的概率分布。如果 ξ \xi ξ是离散的随机变量,那么定义从P到Qd KL散度为
D K L ( P ∣ ∣ Q ) = ∑ i P ( i ) ln ( P ( i ) Q ( i ) ) \mathbb{D}_{KL}(P\big|\big|Q) = \sum_i P(i)\ln(\frac{P(i)}{Q(i)}) DKL(P Q)=i∑P(i)ln(Q(i)P(i))
如果 ξ \xi ξ是连续变量,则定义从P到Q的KL散度为
D K L ( P ∣ ∣ Q ) = ∫ − ∞ ∞ p ( x ) ln ( p ( x ) q ( x ) ) d x \mathbb{D}_{KL}(P\big|\big|Q) = \int^\infty_{-\infty}p(\mathbb{x})\ln(\frac{p(\mathbb{x})}{q(\mathbb{x})}) d\mathbb{x} DKL(P Q)=∫−∞∞p(x)ln(q(x)p(x))dx
那么根据离散的KL散度定义,我们可以将策略 π \pi π的损失函数展开如下
J π ( ϕ ) = E s t ∼ D [ D K L ( π ϕ ( ⋅ ∣ s t ) ∣ ∣ exp ( Q θ ( s t , ⋅ ) ) Z θ ( s t ) ) ] = E s t ∼ D [ ∑ π ϕ ( ⋅ ∣ s t ) ln ( π ϕ ( ⋅ ∣ s t ) Z θ ( s t ) exp ( Q θ ( s t , ⋅ ) ) ) ] = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( ⋅ ∣ s t ) + ln ( Z θ ( s t ) ) − Q θ ( s t , ⋅ ) ] = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( ⋅ ∣ s t ) ) − Q θ ( s t , ⋅ ) ] \begin{align} J_\pi(\phi) & = \mathbb{E}_{s_t\sim \mathcal{D}} \Big[ \mathbb{D}_{KL}\Big( \pi_\phi(\cdot|s_t) \big|\big| \frac{\exp(Q_\theta(s_t,\cdot))}{Z_\theta(s_t)} \Big) \Big] \\ & = \mathbb{E}_{s_t\sim\mathcal{D}} \Big[ \sum\pi_\phi(\cdot|s_t) \ln(\frac{\pi_\phi(\cdot|s_t)Z_\theta(s_t)}{\exp(Q_\theta(s_t,\cdot))}) \Big] \\ & = \mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln(\pi_\phi(\cdot|s_t) + \ln(Z_\theta(s_t)) - Q_\theta(s_t,\cdot) \Big] \\ & = \textcolor{blue}{\mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln(\pi_\phi(\cdot|s_t)) - Q_\theta(s_t,\cdot) \Big]} \tag{1.4} \end{align} Jπ(ϕ)=Est∼D[DKL(πϕ(⋅∣st) Zθ(st)exp(Qθ(st,⋅)))]=Est∼D[∑πϕ(⋅∣st)ln(exp(Qθ(st,⋅))πϕ(⋅∣st)Zθ(st))]=Est∼D,at∼πϕ[ln(πϕ(⋅∣st)+ln(Zθ(st))−Qθ(st,⋅)]=Est∼D,at∼πϕ[ln(πϕ(⋅∣st))−Qθ(st,⋅)](1.4)
最后一步是因为,分配函数 Z θ Z_\theta Zθ与策略 π \pi π无关,所以对梯度没有影响,所以在目标函数中可以直接忽略。
然后又引入了 reparameter的方法,
a t = f ϕ ( ϵ t ; s t ) , ϵ ∼ N a_t = f_\phi(\epsilon_t;s_t), \epsilon\sim\mathcal{N} at=fϕ(ϵt;st),ϵ∼N
将上式带入 ( 1.4 ) (1.4) (1.4)中则有
J π ( ϕ ) = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( f ϕ ( ϵ t ; s t ) ∣ s t ) ) − Q θ ( s t , f ϕ ( ϵ t ; s t ) ) ] J_\pi(\phi)=\mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln\Big(\pi_\phi\big(f_\phi(\epsilon_t;s_t)|s_t\big)\Big) - Q_\theta\Big(s_t,f_\phi(\epsilon_t;s_t)\Big) \Big] Jπ(ϕ)=Est∼D,at∼πϕ[ln(πϕ(fϕ(ϵt;st)∣st))−Qθ(st,fϕ(ϵt;st))]
最后,只需要不断收集数据,缩小这两个损失函数,就可以得到收敛到一个解。
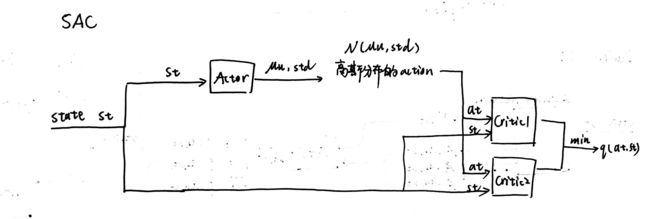
1.3 Two Q Value Neural Network
SAC的策略网络与DDPG中策略网络直接估计动作值大小不同,SAC的策略网络是估计连续动作空间Gaussian分布的均值和方差,再从这个Gaussian 分布中均匀采样获得连续的动作值。SAC中可以维护一个V值函数网络,也可以不维护V值函数网络,但是SAC中必须的是两个Q值函数网络及两个Q值网络的target network和一个策略网络 π \pi π。为什么要维护两个Q值网络呢?这是因为为了减少Q值网络存在的过高估计的问题。然后用两个Q值网络中较小的Q值网络来计算损失函数,假设存在两个Q值网络 Q ( θ 1 ) , Q ( θ 2 ) Q(\theta_1),Q(\theta_2) Q(θ1),Q(θ2)和其对应的target network Q ( θ 1 − ) , Q ( θ 2 − ) Q(\theta_1^-),Q(\theta_2^-) Q(θ1−),Q(θ2−)
那么Q值函数的损失函数就成了
J Q ( θ ) = E ( s t , a t ) ∼ D [ 1 2 ( Q θ ( s t , a t ) − Q ^ ( s t , a t ) ) ] Q ^ ( s t , a t ) = r ( s t , a t ) + γ V ψ ( s t + 1 ) V ψ ( s t + 1 ) = Q θ ( s t + 1 , a t + 1 ) − α log ( π ( a t + 1 ∣ s t + 1 ) ) \begin{align} J_Q(\theta) & = \mathbb{E}_{(s_t,a_t)\sim\mathcal{D}} \Big[ \frac{1}{2}\Big( Q_\theta(s_t,a_t) - \hat{Q}(s_t,a_t) \Big) \Big] \tag{1.5} \\ \hat{Q}(s_t,a_t) & = r(s_t,a_t) + \gamma V_\psi(s_{t+1}) \tag{1.6} \\ V_\psi(s_{t+1}) & = Q_\theta(s_{t+1}, a_{t+1}) - \alpha \log (\pi(a_{t+1}|s_{t+1})) \tag{1.7} \end{align} JQ(θ)Q^(st,at)Vψ(st+1)=E(st,at)∼D[21(Qθ(st,at)−Q^(st,at))]=r(st,at)+γVψ(st+1)=Qθ(st+1,at+1)−αlog(π(at+1∣st+1))(1.5)(1.6)(1.7)
结合式子 1.5 , 1.6 , 1.7 1.5, 1.6, 1.7 1.5,1.6,1.7则有
J Q ( θ ) = E ( s t , a t ) ∼ D [ 1 2 ( Q θ ( s t , a t ) − ( r ( s t , a t ) + γ ( min j = 1 , 2 Q θ j − ( s t + 1 , a t + 1 ) − α log π ( a t + 1 ∣ s t + 1 ) ) ) ) 2 ] J_Q(\theta) = \textcolor{red}{\mathbb{E}_{(s_t,a_t)\sim\mathcal{D}} \Big[ \frac{1}{2}\Big( Q_\theta(s_t,a_t) - \Big(r(s_t,a_t)+\gamma \big(\min_{j=1,2}Q_{\theta_j^-}(s_{t+1},a_{t+1}) - \alpha \log\pi(a_{t+1}|s_{t+1}) \big) \Big) \Big)^2 \Big]} JQ(θ)=E(st,at)∼D[21(Qθ(st,at)−(r(st,at)+γ(j=1,2minQθj−(st+1,at+1)−αlogπ(at+1∣st+1))))2]
因为SAC也是一种离线的算法,为了让训练更加稳定,这里使用了目标Q网络 Q ( θ − ) Q(\theta^-) Q(θ−),同样是两个目标网络,与两个Q网络相对应,SAC中目标Q网络的更新方式和DDPG中一致。
之前推导了策略 π ( ϕ ) \pi(\phi) π(ϕ)的损失函数如下
J π ( ϕ ) = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( ⋅ ∣ s t ) ) − Q θ ( s t , ⋅ ) ] J_\pi(\phi) = \mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln(\pi_\phi(\cdot|s_t)) - Q_\theta(s_t,\cdot) \Big] Jπ(ϕ)=Est∼D,at∼πϕ[ln(πϕ(⋅∣st))−Qθ(st,⋅)]
再引入reparameter化简之后,就成了
J π ( ϕ ) = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( f ϕ ( ϵ t ; s t ) ∣ s t ) ) − Q θ ( s t , f ϕ ( ϵ t ; s t ) ) ] J_\pi(\phi)=\mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln\Big(\pi_\phi\big(f_\phi(\epsilon_t;s_t)|s_t\big)\Big) - Q_\theta\Big(s_t,f_\phi(\epsilon_t;s_t)\Big) \Big] Jπ(ϕ)=Est∼D,at∼πϕ[ln(πϕ(fϕ(ϵt;st)∣st))−Qθ(st,fϕ(ϵt;st))]
利用双Q网络取最小,再将上述目标函数进行改写
J π ( ϕ ) = E s t ∼ D , a t ∼ π ϕ [ ln ( π ϕ ( f ϕ ( ϵ t ; s t ) ∣ s t ) ) − min j = 1 , 2 Q θ j ( s t , f ϕ ( ϵ t ; s t ) ) ] J_\pi(\phi)= \textcolor{red}{\mathbb{E}_{s_t\sim\mathcal{D}, a_t\sim \pi_\phi} \Big[ \ln\Big(\pi_\phi\big(f_\phi(\epsilon_t;s_t)|s_t\big)\Big) - \min_{j=1,2}Q_{\theta_j}\Big(s_t,f_\phi(\epsilon_t;s_t)\Big) \Big]} Jπ(ϕ)=Est∼D,at∼πϕ[ln(πϕ(fϕ(ϵt;st)∣st))−j=1,2minQθj(st,fϕ(ϵt;st))]
1.4 Tricks
SAC还集成了一些别的算法的常用技巧,比如Replay Buffer来产生independent and identically distribution的样本,使用了Double DQN中target network的思想使用两个网络。SAC中最重要的一个技巧是自动调整熵正则项,在 SAC 算法中,如何选择熵正则项的系数非常重要。在不同的状态下需要不同大小的熵:在最优动作不确定的某个状态下,熵的取值应该大一点;而在某个最优动作比较确定的状态下,熵的取值可以小一点。为了自动调整熵正则项,SAC 将强化学习的目标改写为一个带约束的优化问题:
max π E π [ ∑ t r ( s t , a t ) ] s.t. E ( s t , a t ) ∼ ρ π [ − log ( π t ( a t ∣ s t ) ) ] ≥ H 0 \max_\pi \mathbb{E}_\pi\Big[ \sum_t r(s_t,a_t) \Big] \quad \text{s.t.} \quad \mathbb{E}_{(s_t,a_t)\sim\rho_\pi}[-\log (\pi_t(a_t|s_t))] \ge \mathcal{H}_0 πmaxEπ[t∑r(st,at)]s.t.E(st,at)∼ρπ[−log(πt(at∣st))]≥H0
H 0 \mathcal{H}_0 H0 是预先定义好的最小策略熵的阈值。通过一些数学技巧简化,可以得到温度 α \alpha α的损失函数
J ( α ) = E s t ∼ R , a t ∼ π ( ⋅ ∣ s t ) [ − α log ( π t ( a t ∣ s t ) ) − α H 0 ] J(\alpha) = \textcolor{red}{\mathbb{E}_{s_t\sim R,a_t\sim \pi(\cdot|s_t)}[-\alpha\log(\pi_t(a_t|s_t))-\alpha\mathcal{H}_0]} J(α)=Est∼R,at∼π(⋅∣st)[−αlog(πt(at∣st))−αH0]
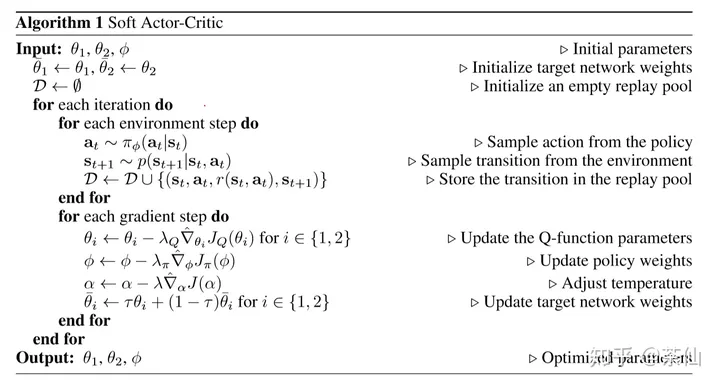
1.5 Pesudocode
2. 代码实现
2.1 SAC处理连续动作空间
采用gymnasium中Pendulum-v1的连续动作环境,整体代码如下
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.distributions import Normal
from tqdm import tqdm
import collections
import random
import numpy as np
import matplotlib.pyplot as plt
import gym
# replay buffer
class ReplayBuffer():
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity)
def add(self, s, r, a, s_, d):
self.buffer.append((s,r,a,s_,d))
def sample(self, batch_size):
transitions = random.sample(self.buffer, batch_size)
states, rewards, actions, next_states, dones = zip(*transitions)
return np.array(states), rewards, actions, np.array(next_states), dones
def size(self):
return len(self.buffer)
# Actor
class PolicyNet_Continuous(nn.Module):
"""动作空间符合高斯分布,输出动作空间的均值mu,和标准差std"""
def __init__(self, state_dim, hidden_dim, action_dim, action_bound):
super(PolicyNet_Continuous, self).__init__()
self.fc1 = nn.Sequential(
nn.Linear(in_features=state_dim, out_features=hidden_dim),
nn.ReLU()
)
self.fc_mu = nn.Linear(in_features=hidden_dim, out_features=action_dim)
self.fc_std = nn.Sequential(
nn.Linear(in_features=hidden_dim, out_features=action_dim),
nn.Softplus()
)
self.action_bound = action_bound
def forward(self, s):
x = self.fc1(s)
mu = self.fc_mu(x)
std = self.fc_std(x)
distribution = Normal(mu, std)
normal_sample = distribution.rsample()
normal_log_prob = distribution.log_prob(normal_sample)
# get action limit to [-1,1]
action = torch.tanh(normal_sample)
# get tanh_normal log probability
tanh_log_prob = normal_log_prob - torch.log(1 - torch.tanh(action).pow(2) + 1e-7)
# get action bounded
action = action * self.action_bound
return action, tanh_log_prob
# Critic
class QValueNet_Continuous(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(QValueNet_Continuous, self).__init__()
self.fc1 = nn.Sequential(
nn.Linear(in_features=state_dim + action_dim, out_features=hidden_dim),
nn.ReLU()
)
self.fc2 = nn.Sequential(
nn.Linear(in_features=hidden_dim, out_features=hidden_dim),
nn.ReLU()
)
self.fc_out = nn.Linear(in_features=hidden_dim, out_features=1)
def forward(self, s, a):
cat = torch.cat([s,a], dim=1)
x = self.fc1(cat)
x = self.fc2(x)
return self.fc_out(x)
# maximize entropy deep reinforcement learning SAC
class SAC_Continuous():
def __init__(self, state_dim, hidden_dim, action_dim, action_bound,
actor_lr, critic_lr, alpha_lr, target_entropy, tau, gamma,
device):
# actor
self.actor = PolicyNet_Continuous(state_dim, hidden_dim, action_dim, action_bound).to(device)
# two critics
self.critic1 = QValueNet_Continuous(state_dim, hidden_dim, action_dim).to(device)
self.critic2 = QValueNet_Continuous(state_dim, hidden_dim, action_dim).to(device)
# two target critics
self.target_critic1 = QValueNet_Continuous(state_dim, hidden_dim, action_dim).to(device)
self.target_critic2 = QValueNet_Continuous(state_dim, hidden_dim, action_dim).to(device)
# initialize with same parameters
self.target_critic1.load_state_dict(self.critic1.state_dict())
self.target_critic2.load_state_dict(self.critic2.state_dict())
# specify optimizers
self.optimizer_actor = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)
self.optimizer_critic1 = torch.optim.Adam(self.critic1.parameters(), lr=critic_lr)
self.optimizer_critic2 = torch.optim.Adam(self.critic2.parameters(), lr=critic_lr)
# 使用alpha的log值可以使训练稳定
self.log_alpha = torch.tensor(np.log(0.01), dtype=torch.float, requires_grad = True)
self.optimizer_log_alpha = torch.optim.Adam([self.log_alpha], lr=alpha_lr)
self.target_entropy = target_entropy
self.gamma = gamma
self.tau = tau
self.device = device
def take_action(self, state):
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
action, _ = self.actor(state)
return [action.item()]
# calculate td target
def calc_target(self, rewards, next_states, dones):
next_action, log_prob = self.actor(next_states)
entropy = -log_prob
q1_values = self.target_critic1(next_states, next_action)
q2_values = self.target_critic2(next_states, next_action)
next_values = torch.min(q1_values, q2_values) + self.log_alpha.exp() * entropy
td_target = rewards + self.gamma * next_values * (1-dones)
return td_target
# soft update method
def soft_update(self, net, target_net):
for param_target, param in zip(target_net.parameters(), net.parameters()):
param_target.data.copy_(param_target.data * (1.0-self.tau) + param.data * self.tau)
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1,1).to(self.device)
actions = torch.tensor(transition_dict['actions'], dtype=torch.float).view(-1,1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1,1).to(self.device)
rewards = (rewards + 8.0) / 8.0 #对倒立摆环境的奖励进行重塑,方便训练
# update two Q-value network
td_target = self.calc_target(rewards, next_states, dones).detach()
critic1_loss = torch.mean(F.mse_loss(td_target, self.critic1(states, actions)))
critic2_loss = torch.mean(F.mse_loss(td_target, self.critic2(states, actions)))
self.optimizer_critic1.zero_grad()
critic1_loss.backward()
self.optimizer_critic1.step()
self.optimizer_critic2.zero_grad()
critic2_loss.backward()
self.optimizer_critic2.step()
# update policy network
new_actions, log_prob = self.actor(states)
entropy = - log_prob
q1_value = self.critic1(states, new_actions)
q2_value = self.critic2(states, new_actions)
actor_loss = torch.mean(-self.log_alpha.exp() * entropy - torch.min(q1_value, q2_value))
self.optimizer_actor.zero_grad()
actor_loss.backward()
self.optimizer_actor.step()
# update temperature alpha
alpha_loss = torch.mean((entropy - self.target_entropy).detach() * self.log_alpha.exp())
self.optimizer_log_alpha.zero_grad()
alpha_loss.backward()
self.optimizer_log_alpha.step()
# soft update target Q-value network
self.soft_update(self.critic1, self.target_critic1)
self.soft_update(self.critic2, self.target_critic2)
def train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size, render, seed_number):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes/10), desc='Iteration %d'%(i+1)) as pbar:
for i_episode in range(int(num_episodes/10)):
observation, _ = env.reset(seed=seed_number)
done = False
episode_return = 0
while not done:
if render:
env.render()
action = agent.take_action(observation)
observation_, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
replay_buffer.add(observation, action, reward, observation_, done)
# swap states
observation = observation_
episode_return += reward
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {
'states': b_s,
'actions': b_a,
'rewards': b_r,
'next_states': b_ns,
'dones': b_d
}
agent.update(transition_dict)
return_list.append(episode_return)
if(i_episode+1) % 10 == 0:
pbar.set_postfix({
'episode': '%d'%(num_episodes/10 * i + i_episode + 1),
'return': "%.3f"%(np.mean(return_list[-10:]))
})
pbar.update(1)
env.close()
return return_list
def moving_average(a, window_size):
cumulative_sum = np.cumsum(np.insert(a, 0, 0))
middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_size
r = np.arange(1, window_size-1, 2)
begin = np.cumsum(a[:window_size-1])[::2] / r
end = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]
return np.concatenate((begin, middle, end))
def plot_curve(return_list, mv_return, algorithm_name, env_name):
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list, c='gray', alpha=0.6)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('{} on {}'.format(algorithm_name, env_name))
plt.show()
if __name__ == "__main__":
# reproducible
seed_number = 0
random.seed(seed_number)
np.random.seed(seed_number)
torch.manual_seed(seed_number)
num_episodes = 150 # episodes length
hidden_dim = 128 # hidden layers dimension
gamma = 0.98 # discounted rate
actor_lr = 1e-4 # lr of actor
critic_lr = 1e-3 # lr of critic
alpha_lr = 1e-4
tau = 0.005 # soft update parameter
buffer_size = 10000
minimal_size = 1000
batch_size = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
env_name = 'Pendulum-v1'
render = False
if render:
env = gym.make(id=env_name, render_mode='human')
else:
env = gym.make(id=env_name)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.shape[0]
action_bound = env.action_space.high[0]
# entropy初始化为动作空间维度的负数
target_entropy = - env.action_space.shape[0]
replaybuffer = ReplayBuffer(buffer_size)
agent = SAC_Continuous(state_dim, hidden_dim, action_dim, action_bound, actor_lr, critic_lr, alpha_lr, target_entropy, tau, gamma, device)
return_list = train_off_policy_agent(env, agent, num_episodes, replaybuffer, minimal_size, batch_size, render, seed_number)
mv_return = moving_average(return_list, 9)
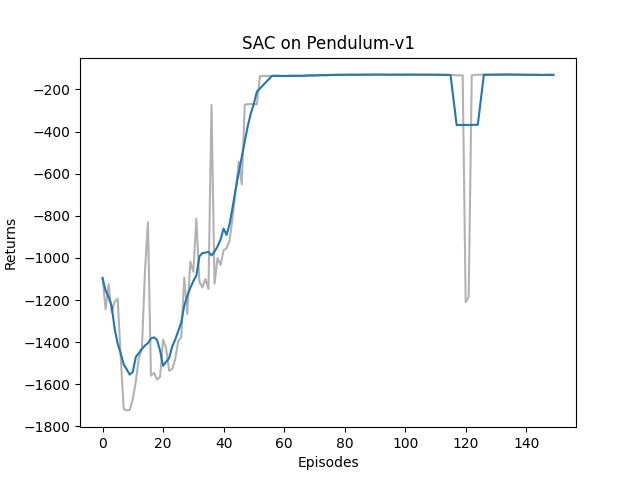
plot_curve(return_list, mv_return, 'SAC', env_name)
所获得的回报曲线如下图
2.2 SAC处理离散动作空间
采用gaymnasium中的CartPole-v1离散动作空间的环境。
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.distributions import Categorical
from tqdm import tqdm
import collections
import random
import numpy as np
import matplotlib.pyplot as plt
import gym
# replay buffer
class ReplayBuffer():
def __init__(self, capacity):
self.buffer = collections.deque(maxlen=capacity)
def add(self, s, r, a, s_, d):
self.buffer.append((s,r,a,s_,d))
def sample(self, batch_size):
transitions = random.sample(self.buffer, batch_size)
states, rewards, actions, next_states, dones = zip(*transitions)
return np.array(states), rewards, actions, np.array(next_states), dones
def size(self):
return len(self.buffer)
# Actor
class PolicyNet_Discrete(nn.Module):
"""动作空间服从离散的概率分布,输出每个动作的概率值"""
def __init__(self, state_dim, hidden_dim, action_dim):
super(PolicyNet_Discrete, self).__init__()
self.fc1 = nn.Sequential(
nn.Linear(in_features=state_dim, out_features=hidden_dim),
nn.ReLU()
)
self.fc2 = nn.Sequential(
nn.Linear(in_features=hidden_dim, out_features=action_dim),
nn.Softmax(dim=1)
)
def forward(self, s):
x = self.fc1(s)
return self.fc2(x)
# Critic
class QValueNet_Discrete(nn.Module):
def __init__(self, state_dim, hidden_dim, action_dim):
super(QValueNet_Discrete, self).__init__()
self.fc1 = nn.Sequential(
nn.Linear(in_features=state_dim, out_features=hidden_dim),
nn.ReLU()
)
self.fc2 = nn.Linear(in_features=hidden_dim, out_features=action_dim)
def forward(self, s):
x = self.fc1(s)
return self.fc2(x)
# maximize entropy deep reinforcement learning SAC
class SAC_Continuous():
def __init__(self, state_dim, hidden_dim, action_dim,
actor_lr, critic_lr, alpha_lr, target_entropy, tau, gamma,
device):
# actor
self.actor = PolicyNet_Discrete(state_dim, hidden_dim, action_dim).to(device)
# two critics
self.critic1 = QValueNet_Discrete(state_dim, hidden_dim, action_dim).to(device)
self.critic2 = QValueNet_Discrete(state_dim, hidden_dim, action_dim).to(device)
# two target critics
self.target_critic1 = QValueNet_Discrete(state_dim, hidden_dim, action_dim).to(device)
self.target_critic2 = QValueNet_Discrete(state_dim, hidden_dim, action_dim).to(device)
# initialize with same parameters
self.target_critic1.load_state_dict(self.critic1.state_dict())
self.target_critic2.load_state_dict(self.critic2.state_dict())
# specify optimizers
self.optimizer_actor = torch.optim.Adam(self.actor.parameters(), lr=actor_lr)
self.optimizer_critic1 = torch.optim.Adam(self.critic1.parameters(), lr=critic_lr)
self.optimizer_critic2 = torch.optim.Adam(self.critic2.parameters(), lr=critic_lr)
# 使用alpha的log值可以使训练稳定
self.log_alpha = torch.tensor(np.log(0.01), dtype=torch.float, requires_grad = True)
self.optimizer_log_alpha = torch.optim.Adam([self.log_alpha], lr=alpha_lr)
self.target_entropy = target_entropy
self.gamma = gamma
self.tau = tau
self.device = device
def take_action(self, state):
state = torch.tensor(np.array([state]), dtype=torch.float).to(self.device)
probs = self.actor(state)
action_dist = Categorical(probs)
action = action_dist.sample()
return action.item()
# calculate td target
def calc_target(self, rewards, next_states, dones):
next_probs = self.actor(next_states)
next_log_probs = torch.log(next_probs + 1e-8)
entropy = -torch.sum(next_probs * next_log_probs, dim=1, keepdim=True)
q1_values = self.target_critic1(next_states)
q2_values = self.target_critic2(next_states)
min_qvalue = torch.sum(next_probs * torch.min(q1_values, q2_values),
dim=1,
keepdim=True)
next_value = min_qvalue + self.log_alpha.exp() * entropy
td_target = rewards + self.gamma * next_value * (1 - dones)
return td_target
# soft update method
def soft_update(self, net, target_net):
for param_target, param in zip(target_net.parameters(), net.parameters()):
param_target.data.copy_(param_target.data * (1.0-self.tau) + param.data * self.tau)
def update(self, transition_dict):
states = torch.tensor(transition_dict['states'], dtype=torch.float).to(self.device)
rewards = torch.tensor(transition_dict['rewards'], dtype=torch.float).view(-1,1).to(self.device)
actions = torch.tensor(transition_dict['actions'], dtype=torch.int64).view(-1,1).to(self.device)
next_states = torch.tensor(transition_dict['next_states'], dtype=torch.float).to(self.device)
dones = torch.tensor(transition_dict['dones'], dtype=torch.float).view(-1,1).to(self.device)
rewards = (rewards + 8.0) / 8.0 #对倒立摆环境的奖励进行重塑,方便训练
# update two Q-value network
td_target = self.calc_target(rewards, next_states, dones).detach()
critic1_loss = torch.mean(F.mse_loss(td_target, self.critic1(states).gather(dim=1,index=actions)))
critic2_loss = torch.mean(F.mse_loss(td_target, self.critic2(states).gather(dim=1,index=actions)))
self.optimizer_critic1.zero_grad()
critic1_loss.backward()
self.optimizer_critic1.step()
self.optimizer_critic2.zero_grad()
critic2_loss.backward()
self.optimizer_critic2.step()
# update policy network
probs = self.actor(states)
log_probs = torch.log(probs + 1e-8)
entropy = -torch.sum(probs * log_probs, dim=1, keepdim=True)
q1_value = self.critic1(states)
q2_value = self.critic2(states)
min_qvalue = torch.sum(probs * torch.min(q1_value, q2_value),
dim=1,
keepdim=True) # 直接根据概率计算期望
actor_loss = torch.mean(-self.log_alpha.exp() * entropy - min_qvalue)
self.optimizer_actor.zero_grad()
actor_loss.backward()
self.optimizer_actor.step()
# update temperature alpha
alpha_loss = torch.mean((entropy - self.target_entropy).detach() * self.log_alpha.exp())
self.optimizer_log_alpha.zero_grad()
alpha_loss.backward()
self.optimizer_log_alpha.step()
# soft update target Q-value network
self.soft_update(self.critic1, self.target_critic1)
self.soft_update(self.critic2, self.target_critic2)
def train_off_policy_agent(env, agent, num_episodes, replay_buffer, minimal_size, batch_size, render, seed_number):
return_list = []
for i in range(10):
with tqdm(total=int(num_episodes/10), desc='Iteration %d'%(i+1)) as pbar:
for i_episode in range(int(num_episodes/10)):
observation, _ = env.reset(seed=seed_number)
done = False
episode_return = 0
while not done:
if render:
env.render()
action = agent.take_action(observation)
observation_, reward, terminated, truncated, _ = env.step(action)
done = terminated or truncated
replay_buffer.add(observation, action, reward, observation_, done)
# swap states
observation = observation_
episode_return += reward
if replay_buffer.size() > minimal_size:
b_s, b_a, b_r, b_ns, b_d = replay_buffer.sample(batch_size)
transition_dict = {
'states': b_s,
'actions': b_a,
'rewards': b_r,
'next_states': b_ns,
'dones': b_d
}
agent.update(transition_dict)
return_list.append(episode_return)
if(i_episode+1) % 10 == 0:
pbar.set_postfix({
'episode': '%d'%(num_episodes/10 * i + i_episode + 1),
'return': "%.3f"%(np.mean(return_list[-10:]))
})
pbar.update(1)
env.close()
return return_list
def moving_average(a, window_size):
cumulative_sum = np.cumsum(np.insert(a, 0, 0))
middle = (cumulative_sum[window_size:] - cumulative_sum[:-window_size]) / window_size
r = np.arange(1, window_size-1, 2)
begin = np.cumsum(a[:window_size-1])[::2] / r
end = (np.cumsum(a[:-window_size:-1])[::2] / r)[::-1]
return np.concatenate((begin, middle, end))
def plot_curve(return_list, mv_return, algorithm_name, env_name):
episodes_list = list(range(len(return_list)))
plt.plot(episodes_list, return_list, c='gray', alpha=0.6)
plt.plot(episodes_list, mv_return)
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('{} on {}'.format(algorithm_name, env_name))
plt.show()
if __name__ == "__main__":
# reproducible
seed_number = 0
random.seed(seed_number)
np.random.seed(seed_number)
torch.manual_seed(seed_number)
num_episodes = 200 # episodes length
hidden_dim = 128 # hidden layers dimension
gamma = 0.98 # discounted rate
actor_lr = 1e-3 # lr of actor
critic_lr = 1e-2 # lr of critic
alpha_lr = 1e-2
tau = 0.005 # soft update parameter
buffer_size = 10000
minimal_size = 500
batch_size = 64
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
env_name = 'CartPole-v1'
render = False
if render:
env = gym.make(id=env_name, render_mode='human')
else:
env = gym.make(id=env_name)
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
# entropy初始化为-1
target_entropy = -1
replaybuffer = ReplayBuffer(buffer_size)
agent = SAC_Continuous(state_dim, hidden_dim, action_dim, actor_lr, critic_lr, alpha_lr, target_entropy, tau, gamma, device)
return_list = train_off_policy_agent(env, agent, num_episodes, replaybuffer, minimal_size, batch_size, render, seed_number)
mv_return = moving_average(return_list, 9)
plot_curve(return_list, mv_return, 'SAC', env_name)
Reference
Hands on RL
SAC(Soft Actor-Critic)阅读笔记
Soft Actor-Critic: Off-Policy Maximum Entropy Deep Reinforcement Learning with a Stochastic Actor