CUDA小白 - NPP(3) 图像处理 Color and Sampling Conversion
cuda小白
原始API链接 NPP
GPU架构近些年也有不少的变化,具体的可以参考别的博主的介绍,都比较详细。还有一些cuda中的专有名词的含义,可以参考《详解CUDA的Context、Stream、Warp、SM、SP、Kernel、Block、Grid》
常见的NppStatus,可以看这里。
如有问题,请指出,谢谢
本节内容主要涉及到使用NPP进行一些图像色域变换等,类似功能的就不细说,仅针对一些常见的。由于Debayer,不同yuv之间的转换(Color Sampling Format Conversion),Gamma校正,Complement Color Key(一直不清楚这个啥)以及Color Processing(调色相关)的接触不对,后面就不介绍了,按需。
Color Model Conversion
当前模块主要涉及到的RGB,BGR,YUV,YUV420,YUV422,NV12,YCbCr,YCbCr422和YCbCr420之间的相互转换,以及批处理(分为同样ROI和不同ROI两个接口)的接口。其他还有一些未接触过的XYZ,LUV,Lab,YCC,CMYK_JPEG,HLS,HSV等与RGB或者BGR之间的转换。
本文就那比较简单的转换,以为RGB和YUV之间的相互转换为例子。
// 此处介绍的RGB和YUV都是三通道的,如果是packed的相互转换,则后缀是C3R,如果都是planar的,则后缀是P3R,反之则是P3C3R或者C3P3R。
// =========== RGB2YUV原理 ===========
// Npp32f nY = 0.299F * R + 0.587F * G + 0.114F * B;
// Npp32f nU = (0.492F * ((Npp32f)nB - nY)) + 128.0F;
// Npp32f nV = (0.877F * ((Npp32f)nR - nY)) + 128.0F;
// if (nV > 255.0F)
// nV = 255.0F;
NppStatus nppiRGBToYUV_8u_C3R(const Npp8u *pSrc,
int nSrcStep,
Npp8u *pDst,
int nDstStep,
NppiSize oSizeROI);
// =========== RGB2YUV原理 ===========
// Npp32f nY = (Npp32f)Y;
// Npp32f nU = (Npp32f)U - 128.0F;
// Npp32f nV = (Npp32f)V - 128.0F;
// Npp32f nR = nY + 1.140F * nV;
// if (nR < 0.0F) nR = 0.0F;
// if (nR > 255.0F) nR = 255.0F;
// Npp32f nG = nY - 0.394F * nU - 0.581F * nV;
// if (nG < 0.0F) nG = 0.0F;
// if (nG > 255.0F) nG = 255.0F;
// Npp32f nB = nY + 2.032F * nU;
// if (nB < 0.0F) nB = 0.0F;
// if (nB > 255.0F) nB = 255.0F;
NppStatus nppiYUVToRGB_8u_C3R(const Npp8u *pSrc,
int nSrcStep,
Npp8u *pDst,
int nDstStep,
NppiSize oSizeROI);
code
#include make
cmake_minimum_required(VERSION 3.20)
project(test)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS "/usr/local/cuda/lib64/*.so")
add_executable(test test.cpp)
target_link_libraries(test
${OpenCV_LIBS}
${CUDA_LIBS}
)
result
yuv的结果,使用7yuv工具查看

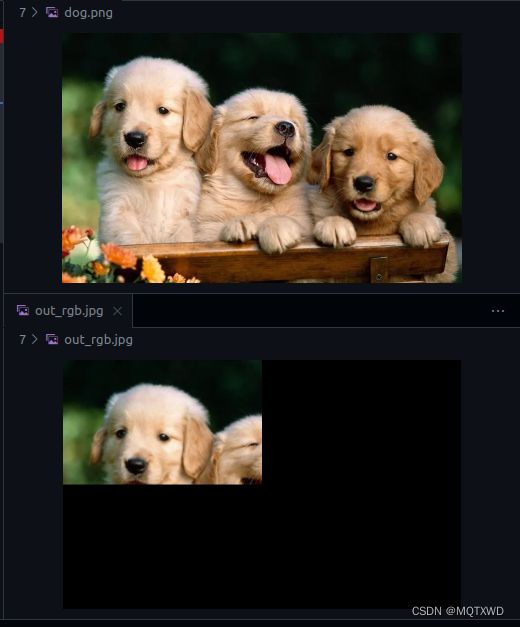
使用转换之后的yuv,再转回RGB,在限定ROI之后的结果:
注意点:
- 可以使用7yuv进行yuv图像的查看,7yuv,下载对应的版本即可,可以体验。
- 还有一个接口是基于JPEG的,主要介绍的是JPEG的Color Conversion,由于平时接触较少,这里暂时不介绍了,按需取《JPEG Color Conversion》.
ColorToGray Conversion
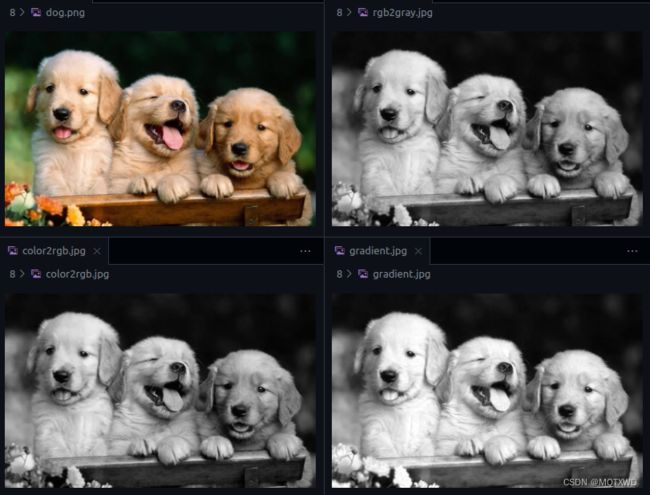
当前模块也主要分为三个大方向:RGBToGray,ColorToGray和GradientColorToGray。三个大方向都只选取一个比较常见的进行介绍:
// nGray = 0.299F * R + 0.587F * G + 0.114F * B;
NppStatus nppiRGBToGray_8u_C3C1R(const Npp8u *pSrc,
int nSrcStep,
Npp8u *pDst,
int nDstStep,
NppiSize oSizeROI);
// nGray = aCoeffs[0] * R + aCoeffs[1] * G + aCoeffs[2] * B;
NppStatus nppiColorToGray_8u_C3C1R(const Npp8u *pSrc,
int nSrcStep,
Npp8u *pDst,
int nDstStep,
NppiSize oSizeROI,
const Npp32f aCoeffs[3]);
// NppiNorm { max(inf) / sum(L1) / square root of sum of squares(L2) }
NppStatus nppiGradientColorToGray_8u_C3C1R(const Npp8u *pSrc,
int nSrcStep,
Npp8u *pDst,
int nDstStep,
NppiSize oSizeROI,
NppiNorm eNorm);
code
#include make
cmake_minimum_required(VERSION 3.20)
project(test)
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
find_package(CUDA REQUIRED)
include_directories(${CUDA_INCLUDE_DIRS})
file(GLOB CUDA_LIBS “/usr/local/cuda/lib64/*.so”)
add_executable(test test.cpp)
target_link_libraries(test
${OpenCV_LIBS}
${CUDA_LIBS}
)
result
注意点:
- Color2Gray的接口与RGB2Gray的区别主要在于三个通道是不是比例关系。由于都是灰度图的,ColorGray的变化与直接rgb的转换结果差异性不易从肉眼看出来,但是通过不同的比例组合明显看出图像是有区别的。