ESP32使用笔记
ESP32使用
- 一.开发板
-
- 1.ESP32 cam
- 2.ESP32C3
- 3.ESP32-WROOM
- 4.ESP32-xiao
-
- 一、开发环境
- 1.arduino ide
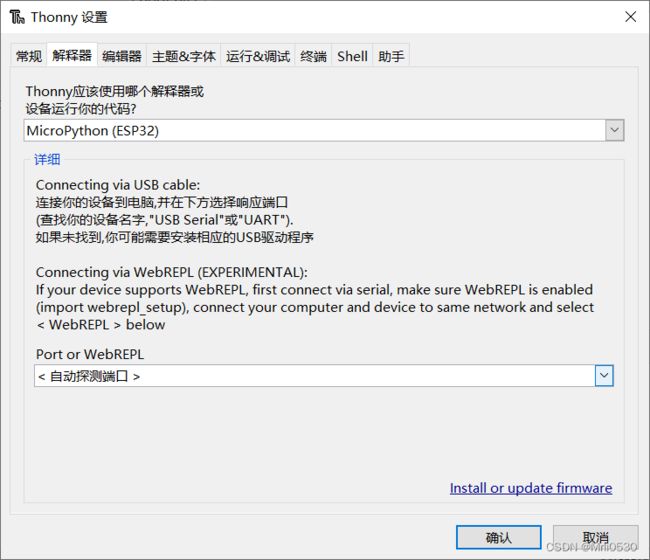
- 2.MicroPython
- 二.程序实战
-
- 1.UDP通讯(任意IP)
-
- 2.DUP(AP)
- 3.DUP(STP)
- 2.ESP NOW
-
- 1.接收端MAC地址获取
- 2.ESP32发送
- 3.ESP8266接受
- 3.DS18B20
- 4.HardwareSerial库(串口映射库)
- 5.josn(结构体)
-
- 发送
- 接收
- 6.esp32 cam
-
- 1.STA模式
- 2.AT模式
- 7.0.96oled
- 8.网络NTP时间
- 9.SD卡模块(ESP32 C3 XIAO)
- 10.UART
-
- ESP32C3
- 12.esp32 cam(固定IP)
- 13.DHT11
- 14.IM1253B
- 15.MQTT接入巴法云
- 16.舵机
- 17.模拟量
一.开发板
1.ESP32 cam


2.ESP32C3
说点什么吧
ESP32C3使用的是合宙公司的产品,主要原因就是9.9一片,尼玛就相当于白嫖,还能跑Luatos,之后趋势吧。
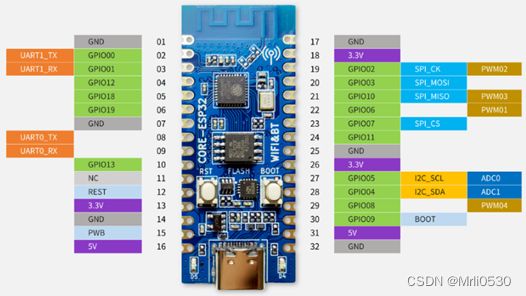
合宙CORE ESP32-C3核心板,是一款基于乐鑫ESP32-C3所设计的开发板,其体型小巧仅为21mm×51mm,它采用邮票孔设计,可直接嵌入开发板上来使用。该核心板支持UART、GPIO、SPI、I2C、ADC、PWM等接口,并板载 Wi-Fi/BLE天线以便于开发者在不同场景下使用。
该核心板的外观如图1所示,其引脚及分布见图2所示。

图1 开发板外观

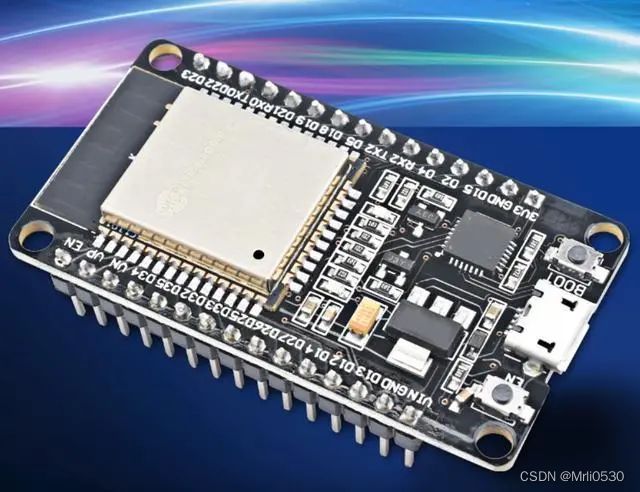
3.ESP32-WROOM

这里很重要
GPIO 6-11 连接到SPI Flash。
GPIO 34-39 只能作为输入且没有内部上拉,其他的可以作为输入或者输出。
GPIO 20, 24, 28, 29, 30, 31 不对外开放。
GPIO 32,33默认连接到RTC域。可能需要如下设置:
4.ESP32-xiao

https://www.seeedstudio.com/Seeed-XIAO-ESP32C3-p-5431.html
一、开发环境
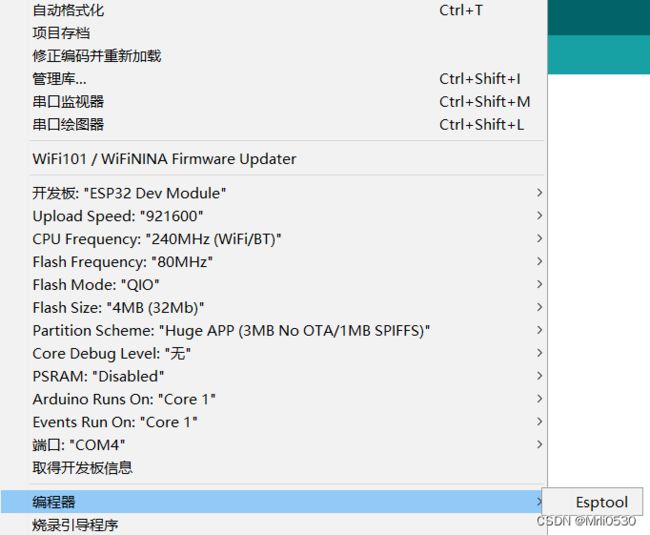
1.arduino ide
使用arduino开发是最方便的,而且开发周期较短,最主要是的是有大量的支持库
https://blog.csdn.net/a1415539404a/article/details/124534428
可以看看这个老哥写的,很详细了。最重要的是要选择
使用注意事项(第3条):
IO12(GPIO12)、IO13(GPIO13)在QIO模式下为SPI信号SPIHD和SPIWP复用,为了增加可用GPIO数量,开发板选择采用2线SPI的DIO模式,IO12、IO13并未连接flash,使用自己编译的软件时需要注意配置flash为DIO模式。


在这一步这里,先点击擦除后会显示“等待上电同步”,之后我们按下板子上的BOOT键1S,进入下载程序模式,就可以了,下面下载固件操作也需要



升级完成后需要重新拔插一下 TPYE-C 线复位一下开发板,即可使用。
二.程序实战
1.UDP通讯(任意IP)
#include 2.DUP(AP)
#include 3.DUP(STP)
#include 2.ESP NOW
先说一下ESP-NOW,它是Espressif开发的一种协议,它使多个设备无需使用Wi-Fi即可相互通信。该协议类似于低功率的2.4GHz无线连接。设备之间需要进行配对,然后才能进行通信。配对完成后,连接安全且点对点,无需握手。”这意味着在将设备彼此配对后,连接将保持不变。换句话说,如果您的一块板突然断电或重置,则在重新启动时,它将自动连接到其对等端以继续通信。
简而言之,ESP-NOW是一种快速通信协议,可用于在ESP8266板之间交换小消息(最大250字节)。
ESP-NOW有多种用途
可以在不同的设置中进行单向或双向通信
一个 主 ESP8266向多个ESP8266 从 发送数据
一块ESP8266板向不同的ESP8266板发送相同或不同的命令。此配置是构建遥控器之类的理想选择
一个ESP8266从站从多个主站接收数据
如果要将多个传感器节点的数据收集到一个ESP8266板中,则此配置非常理想
ESP-NOW双向通讯
使用ESP-NOW,每个板可以同时是发送者和接收者。因此,您可以在板之间建立双向通信。
总而言之,ESP-NOW是构建网络的理想选择,在该网络中,您可以有多个ESP8266板相互交换数据,这篇只是测试单方向的发送数据和接受数据
1.接收端MAC地址获取
#include 2.ESP32发送
#include 3.ESP8266接受
//接收
#include 3.DS18B20
#include 4.HardwareSerial库(串口映射库)
#include 5.josn(结构体)
发送
#include 接收
StaticJsonDocument<200> jsonBuffer2; //声明一个JsonDocument对象,长度200
// 声明一个JSON数据,用作测试
// 反序列化JSON
DeserializationError error = deserializeJson(jsonBuffer2, comdata_ble);
if (error)
{
Serial.print(F("deserializeJson() failed: "));
Serial.println(error.f_str());
return;
}
// 解析JSON
long data1 = jsonBuffer2["time1"]; // 读取整形数据
long data2 = jsonBuffer2["time2"]; // 读取整形数据
long data3 = jsonBuffer2["time3"]; // 读取整形数据
// 输出结果:打印解析后的值
Serial.println(data1);
Serial.println(data2);
Serial.println(data3);
6.esp32 cam
1.STA模式
#include "esp_camera.h"
#include 2.AT模式
#include "esp_camera.h"
#include 7.0.96oled
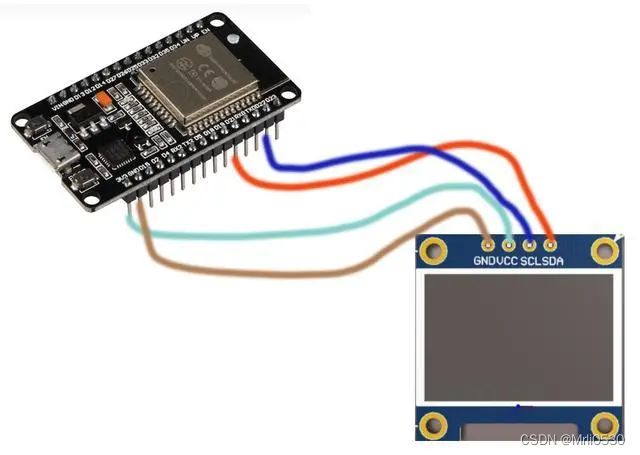
#include void Oled(){
display.clearDisplay(); // 清空屏幕
display.setCursor(0,0); display.print("SSID:"); display.print("ESP82666");
display.display(); // 使更改的显示生效
}
8.网络NTP时间
#include // for WiFi shield
//#include // for WiFi 101 shield or MKR1000
#include 运行效果

9.SD卡模块(ESP32 C3 XIAO)
因为CS和RX引脚复用了。所以在PIN改了引脚,改成了D0;
主要参考这个https://blog.csdn.net/finedayforu/article/details/108727110
#include 实测可用
#include "FS.h"
#include "SD.h"
#include "SPI.h"
void readFile(fs::FS &fs, const char * path){
Serial.printf("Reading file: %s\n", path);
File file = fs.open(path);
if(!file){
Serial.println("Failed to open file for reading");
return;
}
Serial.print("Read from file: ");
while(file.available()){
Serial.write(file.read());
}
file.close();
}
void appendFile(fs::FS &fs, const char * path, const char * message){
Serial.printf("Appending to file: %s\n", path);
File file = fs.open(path, FILE_APPEND);
if(!file){
Serial.println("Failed to open file for appending");
return;
}
if(file.print(message)){
Serial.println("Message appended");
} else {
Serial.println("Append failed");
}
file.close();
}
void setup(){
Serial.begin(115200);
if(!SD.begin()){
Serial.println("Card Mount Failed");
return;
}
appendFile(SD, "/hello.txt", "World!\n"); // 在hello.txt文件末尾继续写入"World!",然后换行
appendFile(SD, "/hello.txt", "asfdfg!\n"); // 在hello.txt文件末尾继续写入"World!",然后换行
appendFile(SD, "/hello.txt", "asdgfgh!\n"); // 在hello.txt文件末尾继续写入"World!",然后换行
readFile(SD, "/hello.txt"); // 读取hello.txt文件的内容并打印出来
}
void loop(){
}
10.UART
String comdata = "";
void setup()
{
Serial.begin(9600);
}
void loop()
{
while (Serial.available() > 0)
{
comdata += char(Serial.read());
delay(2);
}
if (comdata.length() > 0)
{
Serial.println(comdata);
comdata = "";
}
}
```cpp
#include
## 11.MPU6050
### ESP32
```cpp
```cpp
#include
#include
#include
Adafruit_MPU6050 mpu;
void setup(void) {
Serial.begin(115200);
// Try to initialize!
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
// set accelerometer range to +-8G
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
// set gyro range to +- 500 deg/s
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
// set filter bandwidth to 21 Hz
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
delay(100);
}
void loop() {
/* Get new sensor events with the readings */
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
/* Print out the readings */
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(", Y: ");
Serial.print(a.acceleration.y);
Serial.print(", Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(", Y: ");
Serial.print(g.gyro.y);
Serial.print(", Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
Serial.print("Temperature: ");
Serial.print(temp.temperature);
Serial.println(" degC");
Serial.println("");
delay(10);
}
ESP32C3

#include 12.esp32 cam(固定IP)
#include "esp_camera.h"
#include 13.DHT11
#include 14.IM1253B
unsigned char USART_TX_BUF[8]={0x01,0x03,0x00,0x48,0x00,0x08,0xC4,0x1A}; //指令,模块收到该指令后会反馈电流电压值信息HEX
#define TJC Serial2
String str1="";
String str2="";
String a="";
String b="";
String c="";
String d1="";//电压的第1个参数
String d2="";//电压的第2个参数
String d3="";//电压的第3个参数
String d4="";//电压的第4个参数
String e1="";//电流的第1个参数
String e2="";//电流的第2个参数
String e3="";//电流的第3个参数
String e4="";//电流的第4个参数
String f1="";//功率的第1个参数
String f2="";//功率的第2个参数
String f3="";//功率的第3个参数
String f4="";//功率的第4个参数
//String g1="";//电能的第1个参数
//String g2="";//电能的第2个参数
//String g3="";//电能的第3个参数
//String g4="";//电能的第4个参数
//String h1="";//功率因素的第1个参数
//String h2="";//功率因素的第2个参数
//String h3="";//功率因素的第3个参数
//String h4="";//功率因素的第4个参数
//String i1="";//二氧化碳的第1个参数
//String i2="";//二氧化碳的第2个参数
//String i3="";//二氧化碳的第3个参数
//String i4="";//二氧化碳的第4个参数
//String j1="";//频率的第1个参数
//String j2="";//频率的第2个参数
//String j3="";//频率的第3个参数
//String j4="";//频率的第4个参数
long int cmd=0;//字符串转换为整形数据的过程变量
float datas;//测量值
void setup() {
Serial.begin(9600);
TJC.begin(4800);
}
void loop() {
int num = 0;
TJC.write(USART_TX_BUF,8);
delay(200);
for(int i=0; i<=40; i++)
{
str2 = String(TJC.read(),HEX);//将数据以16进制的形式存储进字符串str2
str1 += str2;
str1 += " ";
if(i==0)
{
a = str2;
}
if(i==1)
{
b = str2;
}
if(i==2)
{
c = str2;
}
if(i==3)
{
d1 = str2;
}
if(i==4)
{
d2 = str2;
}
if(i==5)
{
d3 = str2;
}
if(i==6)
{
d4 = str2;
}
if(i==7)
{
e1 = str2;
}
if(i==8)
{
e2 = str2;
}
if(i==9)
{
e3 = str2;
}
if(i==10)
{
e4 = str2;
}
// if(i==11)
// {
// f1 = str2;
// }
// if(i==12)
// {
// f2 = str2;
// }
// if(i==13)
// {
// f3 = str2;
// }
// if(i==14)
// {
// f4 = str2;
// }
// if(i==15)
// {
// g1 = str2;
// }
// if(i==16)
// {
// g2 = str2;
// }
// if(i==17)
// {
// g3 = str2;
// }
// if(i==18)
// {
// g4 = str2;
// }
// if(i==19)
// {
// h1 = str2;
// }
// if(i==20)
// {
// h2 = str2;
// }
// if(i==21)
// {
// h3 = str2;
// }
// if(i==22)
// {
// h4 = str2;
// }
// if(i==23)
// {
// i1 = str2;
// }
// if(i==24)
// {
// i2 = str2;
// }
// if(i==25)
// {
// i3 = str2;
// }
// if(i==26)
// {
// i4 = str2;
// }
// if(i==31)
// {
// j1 = str2;
// }
// if(i==32)
// {
// j2 = str2;
// }
// if(i==33)
// {
// j3 = str2;
// }
// if(i==34)
// {
// j4 = str2;
// }
}
if(str1.charAt(2)=='3')//由于开始几次会得到乱码,第二字符为'3'的时候才进行数据处理
{
//Serial.println(str1);
//<地址>值
if (a.length()<2){a="0"+a;} //当为个位数补0
str2=a;
char charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd;
Serial.print("Address:");Serial.println(int(datas));
str2="";
datas=0;
//<地址>值结束
//<命令>值
if (b.length()<2){b="0"+b;} //当为个位数补0
str2=b;
charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd;
Serial.print("Command:");Serial.println(int(datas));
str2="";
datas=0;
//<数据长度>值
if (c.length()<2){c="0"+c;} //当为个位数补0
str2=c;
charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd;
Serial.print("Data length:");Serial.println(int(datas));
str2="";
datas=0;
//<电压>值
if (d1.length()<2){d1="0"+d1;} //当为个位数补0
if (d2.length()<2){d2="0"+d2;}
if (d3.length()<2){d3="0"+d3;}
if (d4.length()<2){d4="0"+d4;}
str2=d1+d2+d3+d4;
charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd *0.0001;
Serial.print("Voltage:");Serial.print(datas,4);Serial.println("V");
str2="";
datas=0;
//<电流>值
if (e1.length()<2){e1="0"+e1;} //当为个位数补0
if (e2.length()<2){e2="0"+e2;}
if (e3.length()<2){e3="0"+e3;}
if (e4.length()<2){e4="0"+e4;}
str2=e1+e2+e3+e4;
charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd *0.0001;
Serial.print("Ampere:");Serial.print(datas,4);Serial.println("A");
str2="";
datas=0;
// //<功率>值
// if (f1.length()<2){f1="0"+f1;} //当为个位数补0
// if (f2.length()<2){f2="0"+f2;}
// if (f3.length()<2){f3="0"+f3;}
// if (f4.length()<2){f4="0"+f4;}
// str2=f1+f2+f3+f4;
// charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
// str2.toCharArray(charBuf, str2.length() + 1) ;
// cmd = strtoul(charBuf, NULL, 16);
// datas = cmd *0.0001;
// Serial.print("Power:");Serial.print(datas,4);Serial.println("W");
// str2="";
// datas=0;
//
// //<电能>值
// if (g1.length()<2){g1="0"+g1;} //当为个位数补0
// if (g2.length()<2){g2="0"+g2;}
// if (g3.length()<2){g3="0"+g3;}
// if (g4.length()<2){g4="0"+g4;}
// str2=g1+g2+g3+g4;
// charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
// str2.toCharArray(charBuf, str2.length() + 1) ;
// cmd = strtoul(charBuf, NULL, 16);
// datas = cmd *0.0001;
// Serial.print("Electric energy:");Serial.print(datas,4);Serial.println("kWh");
// str2="";
// datas=0;
//
// //<功率因素>值
// if (h1.length()<2){h1="0"+h1;} //当为个位数补0
// if (h2.length()<2){h2="0"+h2;}
// if (h3.length()<2){h3="0"+h3;}
// if (h4.length()<2){h4="0"+h4;}
// str2=h1+h2+h3+h4;
// charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
// str2.toCharArray(charBuf, str2.length() + 1) ;
// cmd = strtoul(charBuf, NULL, 16);
// datas = cmd *0.001;
// Serial.print("Power factor:");Serial.println(datas,3);
// str2="";
// datas=0;
//
// //<二氧化碳>值
// if (i1.length()<2){i1="0"+i1;} //当为个位数补0
// if (i2.length()<2){i2="0"+i2;}
// if (i3.length()<2){i3="0"+i3;}
// if (i4.length()<2){i4="0"+i4;}
// str2=i1+i2+i3+i4;
// charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
// str2.toCharArray(charBuf, str2.length() + 1) ;
// cmd = strtoul(charBuf, NULL, 16);
// datas = cmd *0.0001;
// Serial.print("Carbon dioxide:");Serial.print(datas,4);Serial.println("kg");
// str2="";
// datas=0;
//<频率>值
if (f1.length()<2){f1="0"+f1;} //当为个位数补0
if (f2.length()<2){f2="0"+f2;}
if (f3.length()<2){f3="0"+f3;}
if (f4.length()<2){f4="0"+f4;}
str2=f1+f2+f3+f4;
charBuf[str2.length() + 1];//String转char*,char*转long,long转10进制数
str2.toCharArray(charBuf, str2.length() + 1) ;
cmd = strtoul(charBuf, NULL, 16);
datas = cmd *0.01;
Serial.print("Frequency:");Serial.print(datas);Serial.println("Hz");
str2="";
datas=0;
}
str1 = "";//字符串清空
}
15.MQTT接入巴法云
#include 16.舵机
int freq = 50; // 1/50秒,50Hz的频率,20ms的周期,这个变量用来存储时钟基准。
int resolution = 8; // 分辨率设置为8,就是2的8次方,用256的数值来映射角度,看下方的占空比函数。
int channel1 = 8; // 通道(高速通道(0 ~ 7)由80MHz时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动。)
const int sg901 = 13;
int channel2 = 9; // 通道(高速通道(0 ~ 7)由80MHz时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动。)
const int sg902 = 12;
int channel3 = 10; // 通道(高速通道(0 ~ 7)由80MHz时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动。)
const int sg903 = 14;
int channel4 = 11; // 通道(高速通道(0 ~ 7)由80MHz时钟驱动,低速通道(8 ~ 15)由 1MHz 时钟驱动。)
const int sg904 = 27;
int jiaodu1=0;
int jiaodu2=0;
int jiaodu3=0;
int jiaodu4=0;
int calculatePWM(int degree) //定义函数用于输出PWM的占空比
{ //0-180度
//20ms周期内,高电平持续时长0.5-2.5ms,对应0-180度舵机角度,参考上面的180度对应图。
const float deadZone = 6.4;//对应0.5ms(0.5ms/(20ms/256))
const float max = 32;//对应2.5ms(2.5ms/(20ms/256))
if (degree < 0)
degree = 0;
if (degree > 180)
degree = 180;
return (int)(((max - deadZone) / 180) * degree + deadZone); //返回度数对应的高电平的数值
}
void setup()
{
Serial.begin(9600);
ledcSetup(channel1, freq, resolution); // 用于设置 LEDC 通道的频率和分辨率。
ledcAttachPin(sg901, channel1); // 将通道与对应的引脚连接
ledcSetup(channel2, freq, resolution); // 用于设置 LEDC 通道的频率和分辨率。
ledcAttachPin(sg902, channel2); // 将通道与对应的引脚连接
ledcSetup(channel3, freq, resolution); // 用于设置 LEDC 通道的频率和分辨率。
ledcAttachPin(sg903, channel3); // 将通道与对应的引脚连接
ledcSetup(channel4, freq, resolution); // 用于设置 LEDC 通道的频率和分辨率。
ledcAttachPin(sg904, channel4); // 将通道与对应的引脚连接
}
void loop()
{
for (int d = 0; d <= 180; d += 10)
{
ledcWrite(channel4, calculatePWM(jiaodu1)); // 输出PWM,设置 LEDC 通道的占空比。
Serial.printf("value=%d,calcu=%d\n", d, calculatePWM(d));
delay(1000);
}
}
17.模拟量
// 电位器连接到GPIO 34(模拟ADC1_CH6)
const int potPin = 34;
// 用于存储电位器值的变量
int potValue = 0;
void setup() {
Serial.begin(115200);
delay(1000);
}
void loop() {
// 读取电位计值
potValue = analogRead(potPin);
Serial.println(potValue);
delay(500);
}