科研无人机平台P600进阶版,突破科研难题!
随着无人机技术日益成熟,无人机的应用领域不断扩大,对无人机研发的需求也在不断增加。然而,许多开发人员面临着无法从零开始构建无人机的时间和精力压力,同时也缺乏适合的软件平台来支持他们的开发工作。为了解决这个问题,我们特别开发了科研无人机平台P600进阶版,为开发人员提供了一个全面的解决方案。

科研无人机平台P600进阶版是一款专业科研无人机开发平台,基于PX4开源飞控技术打造而成,可搭配高精度RTK定位模块、高效数传链路和多类型机载电脑。该平台采用Prometheus自主无人机软件平台作为机载系统,提供了控制、通信等各种代码框架和相应接口;软硬兼修、可拓展性强,适用于无人机行业应用开发以及室外环境下的无人机算法验证,助力开发者快速实现二次开发,大大提升科研效率。
硬件组成
1、飞行平台
科迪威 DP1000工业级的无人机平台,其动力系统采用FOC(Field-Oriented Control),即磁场定向控制,使得电机转矩平稳、噪声小、效率高,并且具有高速的动态响应。整套无人机到手即飞,具有大载重、长续航的优点。

2、开源PX4飞控
PX4是一款用于无人机和其他无人驾驶车辆(如无人车,无人船)的开源飞行控制软件。其为无人机开发人员提供了一套灵活的工具来共享技术,为无人机应用程序创建量身定制了解决方案。
3、机载电脑
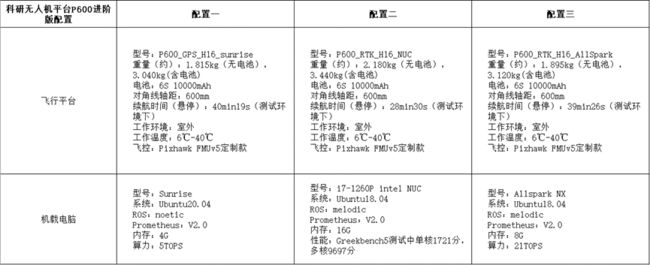
科研无人机平台P600进阶版提供了Sunrise、NUC和Allspark三款机载电脑,开发者可自行选择,分别对应数据中枢、CPU以及GPU需求。
4、RTK
定位方面有GPS和厘米级高精度RTK可选,也可选择更换视觉V-RTK定位。
软件组成
1、机载开源软件
Prometheus V2系统基于ROS及Prometheus开源框架,自带功能丰富。提供定位信息、飞行模式、电池状态、IMU等无人机状态及传感器数据接口,位置、速度、加速度及姿态等控制接口,以及相关开发接口使用例程。内置安全保护机制,降低炸机风险;配套软件仿真,支持仿真Demo与真机快速切换。

2、专业地面站软件
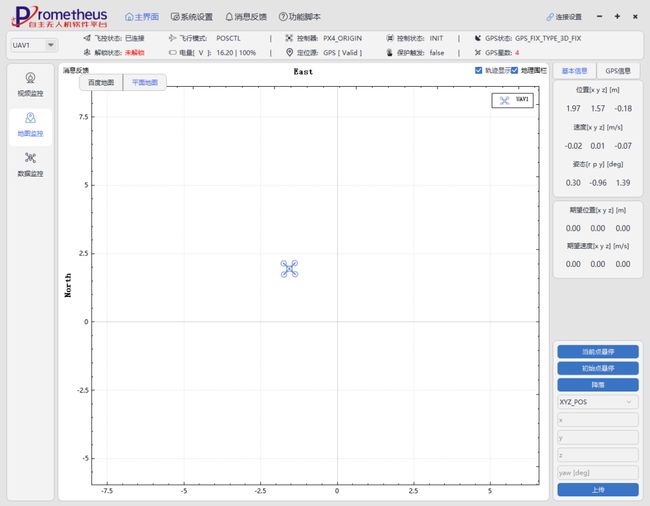
PrometheusGroundStation-Pro是专用于Prometheus自主无人机系统(V2版本)的地面站软件,支持所有使用了Prometheus v2版本的无人机或者仿真主机。功能上包括了单机控制、集群控制、数据监控、视频流显示、卫星地图的轨迹显示和实时位置显示、平面地图的实时位置显示和期望点指示、参数配置、一键启动等功能。同时该软件使用了阿木实验室吊舱的控制接口、图像操作使用等功能,在所有H16-RTK版本的无人机中更是提供了RTCM数据转发功能。下面是部分功能界面展示:
-
地图说明
分为卫星地图和平面地图,其中卫星地图由无人机GPS数据进行实时位置显示。
平面地图则根据无人机自身位置数据进行实时显示(即无人机状态数据中的Position数据),并且会根据用户提供的期望位置,进行一些提示,用以告诉用户飞机飞向的位置。
-
一键启动说明
在这里设置机载端需要启动的脚本,支持launch文件和脚本文件(.sh)两种。生成按钮后会在功能脚本上显示,通过点击可以启动机载端对应脚本。


-
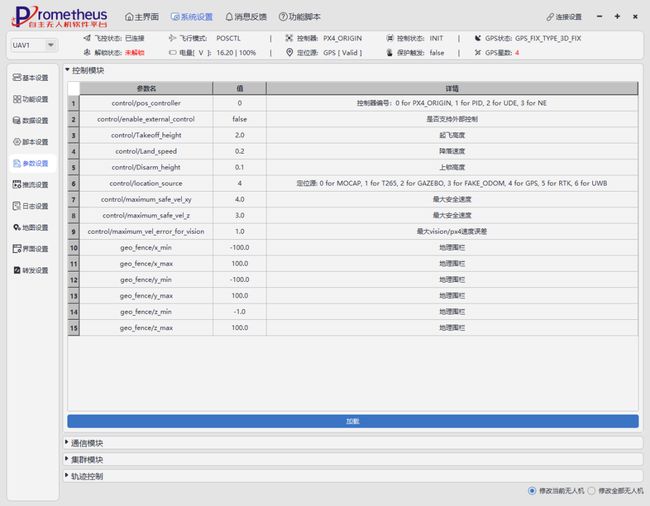
参数配置
可以加载机载端的yaml文件或一些launch文件中的参数进行显示,同时可以在该界面上进行实时修改。
-
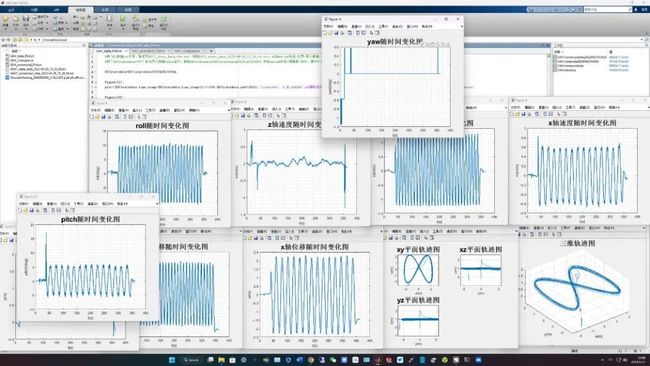
飞行日志记录、轨迹绘图
科研无人机平台P600进阶版核心优势
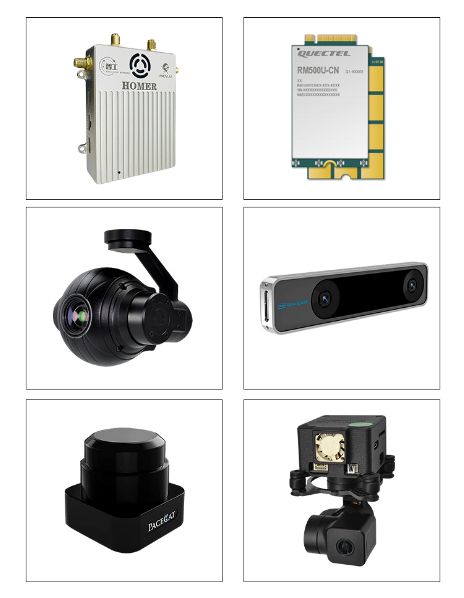
1、可拓展性强
科研无人机平台P600进阶版有着良好的拓展性,可加装Homer、5G等通信模块以及吊舱等其它传感器设备。
2、支持二次开发
科研无人机平台P600进阶版支持二次开发,并且提供uav_control控制模块详细说明,如下:
-
uav_control代码框架说明;
-
uav_control话题介绍;
-
uav_control参数介绍;
-
uav_control消息介绍;
-
uav_control坐标系及安全保护;
-
Prometheus地面站控制逻辑;
-
二次开发教程Demo。
3、提供定制服务
-
支持更换V-RTK(视觉RTK);
-
机载电脑型号定制(x86系列、arm系列等);
-
通信模块定制(Homer、Minihomer、5G模块等);
-
地面站软件定制;
-
加装传感器(比如激光雷达、双目相机等);
-
提供集群通信开发服务。
技术参数及配置
技术手册:https://docs.amovlab.com/p600-uav-wiki/#/
- End -
阿木实验室校园赞助计划主要对象为参与开源项目或在相关技术领域获得荣誉成果的用户。活动分为两部分,分别是技术文章创作和论文奖学金,根据活动规则可分别获得一、二、三等奖的奖励,奖金最高可达10000元,欢迎大家踊跃咨询。阿木实验室,公众号:阿木实验室阿木实验室校园赞助,万元奖学金等你来挑战!