SPI 详解
介绍
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。SPI,是一种高速的,全双工,同步的通信总线。一主多从。
主-从模式(Master-Slave) 的控制方式
SPI 规定了两个 SPI 设备之间通信必须由主设备 (Master) 来控制次设备 (Slave).。SPI 协议规定 Slave 设备的 Clock 由 Master 设备通过 SCK 管脚提供给 Slave 设备, Slave 设备本身不能产生或控制 Clock, 没有 Clock 则 Slave 设备不能正常工作。
命名从主设备角度看。(1)SDO/MOSI (Master Output Slave Input)– 主设备数据输出,即从设备数据输入;(2)SDI/MISO – 数据输入;(3)SCLK – 时钟信号,由主设备产生,没有数据就可以没有时钟;(4)CS/SS – 从设备片选,每个从设备都需要一个,由主设备控制。
SPI有四种传输模式
Master 设备会根据将要交换的数据来产生相应的时钟脉冲(Clock Pulse), 时钟脉冲组成了时钟信号(Clock Signal) , 时钟信号通过时钟极性 (CPOL) 和 时钟相位 (CPHA) 控制着两个 SPI 设备间何时数据交换以及何时对接收到的数据进行采样。
SPI总线的极性,会直接影响SPI总线空闲时的时钟信号是高电平还是低电平。
SPI总线的相位,一个时钟周期会有2个跳变沿。而相位,直接决定SPI总线从那个跳变沿开始采样数据。
图中第一行:总线空闲为高,第二个跳变采集数据。

从设备模式可能是出场就制定好的。
SPI控制器
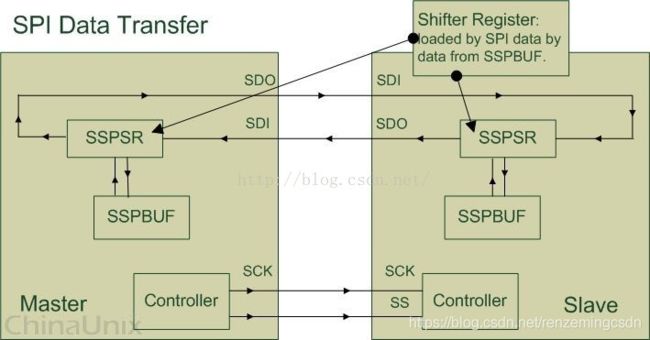
SSPSR 是 SPI 设备内部的移位寄存器(Shift Register). 它的主要作用是根据 SPI 时钟信号状态, 往 SSPBUF 里移入或者移出数据, 每次移动的数据大小由 Bus-Width 以及 Channel-Width 所决定。
Bus-Width 的作用是指定地址总线到 Master 设备之间数据传输的单位.
例如, 我们想要往 Master 设备里面的 SSPBUF 写入 16 Byte 大小的数据: 首先, 给 Master 设备的配置寄存器设置 Bus-Width 为 Byte; 然后往 Master 设备的 Tx-Data 移位寄存器在地址总线的入口写入数据, 每次写入 1 Byte 大小的数据(使用 writeb 函数); 写完 1 Byte 数据之后, Master 设备里面的 Tx-Data 移位寄存器会自动把从地址总线传来的1 Byte 数据移入 SSPBUF 里; 上述动作一共需要重复执行 16次。
Channel-Width 的作用是指定 Master 设备与 Slave 设备之间数据传输的单位. 与 Bus-Width 相似, Master 设备内部的移位寄存器会依据 Channel-Width 自动地把数据从 Master-SSPBUF 里通过 Master-SDO 管脚搬运到 Slave 设备里的 Slave-SDI 引脚, Slave-SSPSR 再把每次接收的数据移入 Slave-SSPBUF里.
通常情况下, Bus-Width 总是会大于或等于 Channel-Width, 这样能保证不会出现因Master 与 Slave 之间数据交换的频率比地址总线与 Master 之间的数据交换频率要快, 导致 SSPBUF 里面存放的数据为无效数据这样的情况。

我们知道, 在每个时钟周期内, Master 与 Slave 之间交换的数据其实都是 SPI 内部移位寄存器从 SSPBUF 里面拷贝的. 我们可以通过往 SSPBUF 对应的寄存器 (Tx-Data / Rx-Data register) 里读写数据, 间接地操控 SPI 设备内部的 SSPBUF.
例如, 在发送数据之前, 我们应该先往 Master 的 Tx-Data 寄存器写入将要发送出去的数据, 这些数据会被 Master-SSPSR 移位寄存器根据 Bus-Width 自动移入 Master-SSPBUF 里, 然后这些数据又会被 Master-SSPSR 根据 Channel-Width 从 Master-SSPBUF 中移出, 通过 Master-SDO 管脚传给 Slave-SDI 管脚, Slave-SSPSR 则把从 Slave-SDI 接收到的数据移入 Slave-SSPBUF 里.
与此同时, Slave-SSPBUF 里面的数据根据每次接收数据的大小(Channel-Width), 通过 Slave-SDO 发往 Master-SDI, Master-SSPSR 再把从 Master-SDI 接收的数据移入 Master-SSPBUF.在单次数据传输完成之后, 用户程序可以通过从 Master 设备的 Rx-Data 寄存器读取 Master 设备数据交换得到的数据.
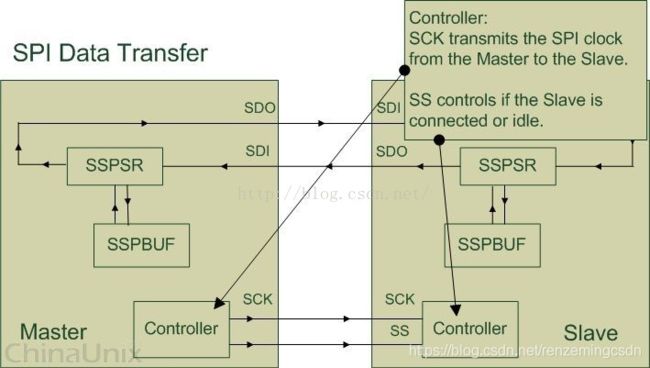
Master 设备里面的 Controller 主要通过时钟信号(Clock Signal)以及片选信号(Slave Select Signal)来控制 Slave 设备. Slave 设备会一直等待, 直到接收到 Master 设备发过来的片选信号, 然后根据时钟信号来工作.
Master 设备的片选操作必须由程序所实现. 例如: 由程序把 SS/CS 管脚的时钟信号拉低电平, 完成 SPI 设备数据通信的前期工作; 当程序想让 SPI 设备结束数据通信时, 再把 SS/CS 管脚上的时钟信号拉高电平.
速度
SPI是一种事实标准,由Motorola开发,并没有一个官方标准。已知的有的器件SPI已达到50Mbps。具体到产品中SPI的速率主要看主从器件SPI控制器的性能限制。
STM32f103 中APB1的最高频率是36MHz,APB2的最高频率是72MHz,而PCLK1和PCLK2一般也默认配置为其最高工作频率36M和72M。
SPI1时钟由APB2时钟分频而来,可以选择2、4、8、16、32、64、128、256这几个分频系数。而手册规定STM32的SPI时钟最快是18MHz。对于STM32F103的SPI1接口时钟,由72M的PCLK2分频得到,所以分配系数大于等于4(72M/4 = 18M)。对于STM32F103的SPI2/SPI3接口时钟,由36M的PCLK1分频得到,所以分配系数大于等于2(36M/2 = 18M)。
若在配置SPI1时,选择了APB2的二分频选项,依据理论SPI1的时钟速率将为36MHz(有网友测试过,确实可以达到36hz)。这个频率大于手册中要求的最快的18Mhz。如果为了追求高速率使用36MHz,建议一定要加强测试环节,同时不建议在工控产品等高可靠性的场合使用。