算法基础第三章
算法基础第三章
- 1、dfs(深度搜索)
-
- 1.1、 递归+回溯
- 1.2、递归+剪枝(剪枝就是判断接下来的递归都不会满足条件,直接回溯,不再继续往下无意义的递归)
- 2、bfs(广度搜索)
-
- 2.1、最优路径(只适合于边权都相等的题)
- 3、邻接表存储树和图(邻接表就是单链表 )
-
- 3.1、深度优先遍历(特殊的深搜)
- 3.2、宽度优先遍历(特殊的宽搜)
- 3.3、有向图的拓扑序列(有环的有向图不可能是拓扑序列)
- 4、最短路
-
- 4.1、单源最短路
-
- 4.1.1、所有边权都是整数
- 4.1.2、存在负权边
- 4.2、多源汇最短路
- 5、最小生成树
-
- 5.1、prim算法
- 5.2、Kruskal算法(稀疏图)
- 6、二分图
-
- 6.1、染色法
- 6.2、匈牙利算法
1、dfs(深度搜索)
1.1、 递归+回溯
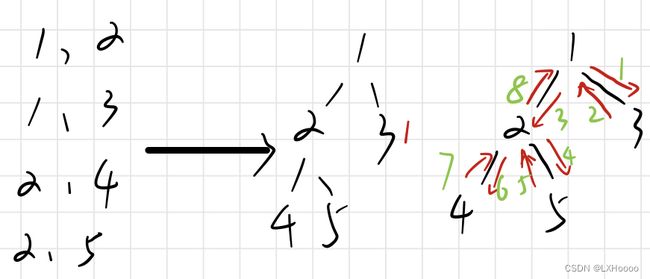
- 解析:下图为1,2,3三个数的全排列过程,从0层开始,一直往下递归,直到数的个数用完,每次使用了一个数需要将这个数标记为已使用过,回溯的时候再恢复为未使用过。

- 题目链接:一个数的全排列
- 代码
#include 1.2、递归+剪枝(剪枝就是判断接下来的递归都不会满足条件,直接回溯,不再继续往下无意义的递归)
- 解析:
- 题目链接:n皇后问题
- 代码:代码并没有全a,路过的大佬可以给个补充
#include 2、bfs(广度搜索)
//基本框架,伪代码
queue_init;
while(!queue.empty())
{
t = queue.pop();//弹出队头元素
queue.push(t.child->node);//这里包括左右子节点
}
2.1、最优路径(只适合于边权都相等的题)
- 解析:
- 题目链接:走迷宫
- 代码
#include 3、邻接表存储树和图(邻接表就是单链表 )
- 树是特殊的有向图,是无环连通图
- 无向图也是一种特殊的有向图,是双向的
- 邻接表的存储代码
#include3.1、深度优先遍历(特殊的深搜)
- 解析:有向图的遍历,深度遍历,逮住一个起点一直往下递归,每个点只遍历一次,直到结束再回溯再递归,一直遍历完所有的点

- 题目链接:未找到对应的题目,贴上acwing原题

- 题目解析:图中的无向图,可以看到左图删除节点1,有三个连通域,大小分别是3,4,1,最大值为4,我们只需要遍历节点1 的子节点就能得到三个大小。右图删除节点4,三个连通域大小分别为5,2,1,上面连通域的大小我们只要求出节点4的子节点数,用总数减去就能得到。那对应的每删除一个节点都有相应的连通域,要求出这些连通域中最大值中的最小值。

- 代码解析:下面的代码初看是有点绕的,图中举了一个较短的例子遍历,可以先把数组的内容全都列出来,假设从1节点开始:1)dfs(1),i=h[1]=2,j=e[2]=3;2)dfs(3),i=h[3]=3,j=e[3]=1,continue;3)i=ne[3]=-1;4)i=ne[2]=0,j=e[0]=2;5)dfs(2),i=h[2]=6,j=e[6]=5;6)dfs(5),i=h[5]=7,j=e[7]=2,continue;7)i=ne[7]=-1;8)i=ne[6]=4,j=e[4]=4;9)dfs(4),i=h[4]=5,j=e[5]=2,continue;10)i=ne[5]=-1;11)i=ne[4]=1,j=e[1]=1,continue;12)i=ne[1]=-1结束。遍历的顺序是1->3->-1再返回1,接着1->2->5->-1再返回2,接着2->4->-1再返回2,2再返回1,1->-1结束遍历。可以看到3的ne保存这到2路径,也就是直接从1到2,中间省去了1。
- 代码(acwing源码)
#include 3.2、宽度优先遍历(特殊的宽搜)
- 解析:套用宽度优先搜索的模板,逮住一个点开始,遍历所有的节点,看保存的节点个数是否和输入的相等,相等的话则是全连通的,否则不是
- 题目链接:宽度优先遍历
- 代码
#include 3.3、有向图的拓扑序列(有环的有向图不可能是拓扑序列)
- 入度:一个点有多少指向自己的边
- 出度:一个点有多少边从自己这出去
- 解析:当一个图按拓扑序排好之后,起点一定是在终点的前面,如图中所示,当按1,2,3排序就是一个拓扑序列,所有边的起点都在终点的前面。当求解一个有向图是否能够组成拓扑排序的时候,也就是看看能否将所有的节点的入度都处理为0,能的话就能拓扑排序,否则就不能

- 题目连接:拓扑排序
- 代码
#include 4、最短路
4.1、单源最短路
- 求一个点到其他所有点的最短路
4.1.1、所有边权都是整数
- 朴素Dijkstra:稠密图(邻接矩阵),m(边数)~n^2(点数)
- 模板:
- 1.dist[1] = 0,dist[i] = 正无穷
- 2.for i 1~n(迭代)
- t<-不在s中的,距离最近的点
- s<-t;//s是当前已确定最短距离的点
- 用t更新其他点的距离
- 题目链接:Dijkstra求最短路径
- 代码
- 模板:
class Solution {
public:
int networkDelayTime(vector<vector<int>> ×, int n, int k) {
const int inf = INT_MAX/2;
//构建邻接矩阵
int g[n][n];
memset(g,0x3f3f3f3f,sizeof g);//这里初始化后的值不等于inf
for(auto &t:times)
{
int x = t[0]-1,y = t[1]-1;
g[x][y] = min(g[x][y],t[2]);
}
-
- //存储距离的数组,初始化为g数组一样的最大值
vector<int>dist(n,0x3f3f3f3f);//保存距离
dist[k-1] = 0;//k是出发点,将出发点的距离设为0,数组中的坐标与节点值是-1的关系
vector<int> st(n,0);//保存是否遍历过的标记
for(int i = 0; i < n;i++)//这个循环是遍历n个节点
{
int t = -1;
for(int j = 0; j < n; j++)//这个循环是找到出发点
{
if(!st[j] && (t == -1 || dist[j] < dist[t]))
{
t = j;
}
}
st[t] = true;//标记这个点被遍历了
for(int j = 0; j < n; j++)//这个循环是计算出出发点最到他点的最短距离
{
dist[j] = min(dist[j],dist[t] + g[t][j]);
}
}
int ans = *max_element(dist.begin(),dist.end());
return ans == 0x3f3f3f3f ? -1 : ans;
}
};
- 堆优化版的Dijkstra算法:稀疏图(邻接表),m(边数)~n(点数)
- 解析:堆优化版的改进是在朴素版的基础上,在for循环找到目标最近点用堆来替代,从而减小时间复杂度,题意中可以看到n和m的数量级是相等的,因此是稀疏图,用邻接表来做
- 题目链接:未找到,acwing原题

- 代码
#include 4.1.2、存在负权边
- Bellman-Ford算法
- 模板
- for n 次
- for 所有边a,b,w
- dist[b] = min(dist[b],dist[a]+w)
- for 所有边a,b,w
- for n 次
- 题目链接:bellman-ford模板算法
- 代码
- 模板
class Solution {
public:
int findCheapestPrice(int n, vector<vector<int>>& flights, int src, int dst, int k) {
int m = flights.size();//写成int m = flights.size()+10; int dist[m],backup[m];会报错
int dist[m+10],backup[m+10];//为了防止超出数组界限,所以在长度上加10
memset(dist,0x3f,sizeof dist);
dist[src] = 0;//从哪个点开始,那个点起始的距离为0
for(int i = 0; i < k+1; i++)//这里k是中转站点,而不是边数,所以是k+1,因为得加上起点
{
memcpy(backup,dist,sizeof dist);//加备份,防止出现串联
for(int j = 0; j < m; j++)
{
auto t = flights[j];
dist[t[1]] = min(dist[t[1]],backup[t[0]] + t[2]);//防止串联,因为要满足k的限制,所以必须保证不能用这次的更新去更新后面的距离
}
}
if(dist[dst] > 0x3f3f3f3f/2) return -1;
else return dist[dst];
}
};
- SPFA算法
- 使用宽搜的队列对Dellman-Ford算法的改进
- 使用SPFA判断负环,也能用于Dijkstra算法解决的最短路径问题
- 题目链接:判断负环
#include 4.2、多源汇最短路
- 源:起点;汇:终点
- 任选两个点,求这两个点之间的最短路
- Floyd算法
- 模板,用邻接矩阵存储边
- d[i,j]
- for(k=1;k<=n;k++)
- for(i=1; i<=m; i++)
- for(j=1; j<=n; j++)
- d[i,j] = min(d[i,j],d[i,j] + d[k,j]);//使用了动态规划的原理
- for(j=1; j<=n; j++)
- for(i=1; i<=m; i++)
- for(k=1;k<=n;k++)
- d[i,j]
- 题目链接:Floyd算法
- 代码
- 模板,用邻接矩阵存储边
在这里插入代码片
5、最小生成树
5.1、prim算法
-
朴素版:稠密图
- 模板
- dist[i]<-inf
- for(i=0;i
- t<-找到集合外距离最近的点
- 用t更新其他点到集合的距离
- st[t] = true;
- 模板
-
解析:起始每个点存储的距离初始化都是inf,随后随便找到一个点开始,图中从1开始,用1到其他点的距离去更新各个点存储的距离,然后1被放入集合

-
堆优化版(一般不用)