(一)KITTI数据集用于3D目标检测
KITTI数据集介绍
数据基本情况
KITTI是德国卡尔斯鲁厄科技学院和丰田芝加哥研究院开源的数据集,最早发布于2012年03月20号。
对应的论文Are we ready for Autonomous Driving? The KITTI Vision Benchmark Suite发表在CVPR2012上。
KITTI数据集搜集自德国卡尔斯鲁厄市,包括市区/郊区/高速公路等交通场景。采集于2011年09月26/28/29/30号及10月03号的白天。
KITTI数据采集使用的平台如下图,
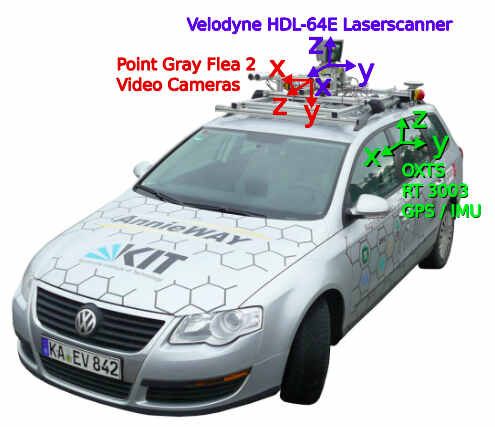
上面平台中包括
- 2个140万像素的黑白相机
- 2个140万像素的彩色相机
- 4个爱特蒙特光学镜头
- 1个64线 Velodyne 3D激光扫描仪
- 1个OXTS RT3003 惯导系统
从上图中可以看到
- 相机的坐标系,Z轴是朝前的,Y轴是朝下的,整个坐标系是右手坐标系。
- 激光雷达的X轴是朝向正前方,Z轴是竖直向上的,Y轴根据右手定则确定
IMU/GPS系统的坐标系朝向和激光雷达一致
总结,KITTI数据集是由4个相机,1个激光雷达,1个IMU/GPS惯导系统共同组成,我们所要厘清的是这6个传感器之间的坐标系关系和时间同步信息。
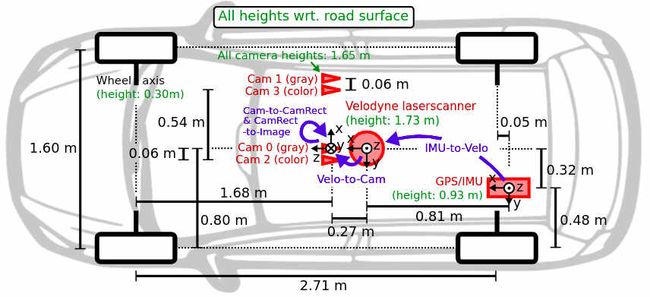
关于传感器的尺寸参数可以参考下图,
在[date]-drive-sync-[sqquence]目录下存放了6个传感器对应的采集数据文件夹。
- image00
- image01
- image02
- image03
- oxts
- velodyne-points
-
时间戳,在
velodyne-points文件夹下有三个时间戳文件timestamps_start.txt,激光扫描仪一周开始扫描的时间timestamps_end.txt,激光扫描仪一周扫描结束的时间timestamps.txt激光扫描到正前方触发相机拍照的时间。
-
图像数据
- 图像是裁剪掉了引擎盖和天空之后的图像
- 图像是去畸变之后的数据
-
OSTX数据,每一帧存储了包括经纬度/速度/加速度等
30个不同的字段值 -
雷达数据
- 浮点数的二进制文件,每个点由4个浮点数组成,雷达坐标系下的
x,y,z坐标,激光的反射强度r - 每扫描一次,大约得到了
120000个3D点。 - 激光雷达绕垂直轴逆时针转动
- 浮点数的二进制文件,每个点由4个浮点数组成,雷达坐标系下的
传感器标定及时间同步
整个系统以激光雷达旋转一周为1帧,激光雷达旋转到某个特定位置的时候,通过一个弹簧片的物理接触触发相机拍照,IMU无法通过这种触发的方式采集数据,但IMU数据采集的频率达到了100HZ,对IMU采集的数据记录时间戳,选择与相机采集时间最接近的作为当前帧的数据,最大时间误差为5ms。
相机标定,相机内外参标定使用的方法是A toolbox for
automatic calibration of range and camera sensors using a single shot,所有的相机中心都已对齐,即他们都在相同的XY平面上,这便于图像的校正(去除天空和引擎盖)
每天开始采集数据前,都会对整个数据采集系统进行标定,以免传感器间位置的偏移。
在每天的date_calib.zip文件夹下,有3个文本文件,
-
calib_cam_to_cam.txt
其中最后三个参数值的解释下, s r e c t ( i ) s^{(i)}_{rect} srect(i)表示的是校正后(去除多余的天空和引擎盖)图像的大小; R r e c t ( i ) \bold{R}^{(i)}_{rect} Rrect(i)是校正所用的旋转矩阵; P r e c t ( i ) \bold{P}^{(i)}_{rect} Prect(i)是校正所用投影矩阵。 i ∈ { 0 , 1 , 2 , 3 } i\in\{0,1,2,3\} i∈{0,1,2,3}表示相机的序号,0表示左侧灰度相机,1表示右侧灰度相机,2表示左侧彩色相机,3表示右侧彩色相机。左侧灰度相机0作为参考相机坐标系,参考相机坐标系下的一个3D点 x = ( x , y , z , 1 ) \bold{x}=(x,y,z,1) x=(x,y,z,1),要变换到第i个相机图像中,可使用如下关系: y = P r e c t ( i ) R r e c t ( 0 ) x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{x} y=Prect(i)Rrect(0)x -
calib_velo_to_cam.txt,KITTI数据集激光雷达也是相对于左侧灰度相机0标定的,由激光到相机的旋转矩阵 R v e l o c a m \bold{R}^{cam}_{velo} Rvelocam和平移向量 t v e l o c a m \bold{t}^{cam}_{velo} tvelocam组成,齐次变换矩阵可以写成,
T v e l o c a m = ( R v e l o c a m t v e l o c a m 0 1 ) \bold{T}^{cam}_{velo}=\begin{pmatrix}R^{cam}_{velo} &t^{cam}_{velo} \\0 &1\end{pmatrix} Tvelocam=(Rvelocam0tvelocam1)
如此,将雷达坐标系下的3D点变换到第 i i i个相机坐标系下时的公式为: y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{T}^{cam}_{velo}\bold{x} y=Prect(i)Rrect(0)Tvelocamx -
calib_imu_to_velo.txt,这个文件中保存有imu坐标系到激光坐标系下的齐次变换矩阵 T i m u v e l o \bold{T}_{imu}^{velo} Timuvelo,如此,将IMU坐标系下的一个3D点变换到第i个图像中的像素坐标的公式可写为
y = P r e c t ( i ) R r e c t ( 0 ) T v e l o c a m T i m u v e l o x \bold{y}=\bold{P}^{(i)}_{rect}\bold{R}^{(0)}_{rect}\bold{T}^{cam}_{velo}\bold{T}_{imu}^{velo}\bold{x} y=Prect(i)Rrect(0)TvelocamTimuvelox
用于3D目标检测
最初数据集支持的任务有双目,光流和里程计。后来,陆陆续续支持了深度估计、2D目标检测、3D目标检测、BEV目标检测、语义分割、实例分割、多目标追踪等任务。
在目标检测中,定义的类别有8种:
Car/Van/Truck/Pedestrian/Person_sitting/Cyclist/Tram/Misc(其他)。
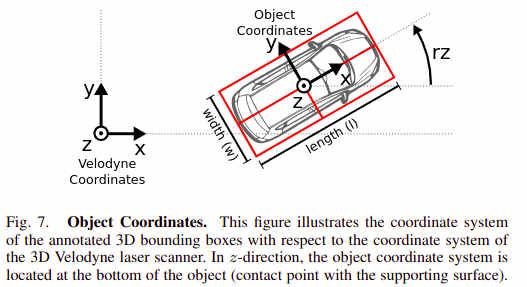
对3D对象的标注是在激光雷达坐标系下进行的,不过值得注意的一点是现在3D目标检测只由检测框中心点坐标xyz,检测框的长宽高length/width/height和检测框的偏航角yaw这7个自由度组成。
不过这里也有个很容易引起歧义的问题length/width/height分别是对应xyz的哪个轴呢?从下图可以看出length对应dx,width对应dy,height对应dz。整个3D框的标注在激光雷达坐标系下。
KITTI 3D目标检测数据集包括7481张训练数据,7518张测试数据。尽管KITTI数据集中包含了标注了8种对象,只有Car/Pedestrian标注的比较充分,KITTI官方用来评估算法, KITTI BenchMark中使用的3D检测框类别有3个,分别是Car/Pedestrian/Cyclist。
下载的3D目标检测数据集包含的文件夹有
image_02, 左目彩色png格式的图像label_02, 左目彩色图像中标注的对象标签calib, 传感器之间的坐标转换关系velodyne, 激光点云数据plane,在激光坐标系下,路面的平面方程
标签文件中每一行内容如下:
Pedestrian 0.00 0 -0.20 712.40 143.00 810.73 307.92 1.89 0.48 1.20 1.84 1.47 8.41 0.01
包含的字段有,
type目标的类型,如Car/Van…,1个字段truncated浮点数0-1,目标对象离开相机视野的比例,1个字段occluded整数0,1,2,3,0:全部可见,1:部分遮挡,2:大部分未遮挡,3:未知,1个字段alpha,对象的观测角,1个字段 [ − π , π ] [-\pi, \pi] [−π,π]bbox,2D检测框像素坐标,x1,y1,x2,y2,4个字段dimensions,3D对象的尺寸,height,width,length,单位是米,3个字段location,3D对象在相机坐标系下的中心坐标xyz,单位是mrotation_y,yaw角,偏航角, [ − π , π ] [-\pi, \pi] [−π,π]score, 目标对象的评分,用来计算ROC曲线或MAP。
相机坐标系中的点可以通过calib中的变换矩阵变换到图像像素坐标中。
rotation_y和alpha的区别在于,alpha度量的是相机中心到对象中心的角度。rotation_y度量的是对象绕相机坐标系y轴的转角yaw。以汽车为例,当一辆车在相机坐标系下位于x轴方向时,其rotation_y角为零,无论这辆车在x,z平面的哪个位置。而对于alpha角来说,仅当汽车在相机坐标系下z轴上时,alpha角为零,偏离z轴时,alpha角都不为零。
将激光点云投影到左目彩色图像中可以使用的公式为:X=P2*R0_rect*Tr_vel_to_cam*Y。
R0_rect是3x3的校正矩阵,Tr_vel_to_cam是3x4的雷达变换到相机坐标系下的变换矩阵。
代码实战
使用open3d读取点云
import numpy as np
import struct
import open3d as o3d
def convert_kitti_bin_to_pcd(binFilePath):
size_float = 4
list_pcd = []
with open(binFilePath, "rb") as f:
byte = f.read(size_float * 4)
print(byte)
while byte:
x, y, z, intensity = struct.unpack("ffff", byte)
list_pcd.append([x, y, z])
byte = f.read(size_float * 4)
np_pcd = np.asarray(list_pcd)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(np_pcd)
return pcd
bs = "/xx/xx/data/code/mmdetection3d/demo/data/kitti/000008.bin"
pcds = convert_kitti_bin_to_pcd(bs)
o3d.visualization.draw_geometries([pcds])
# save
o3d.io.write_point_cloud('000008.pcd', pcds, write_ascii=False, compressed=False, print_progress=False)
通过numpy读取,
def load_bin(bin_file):
data = np.fromfile(bin_file, np.float32).reshape((-1, 4))
data = data[:, :-1]
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(data)
return pcd
上面的代码可以读取并可视化点云数据,且保存成pcd格式的点云。
选取的3D目标检测任务数据集training/image_02/000008.png,
对应的标签文件000008.txt,
Car 0.88 3 -0.69 0.00 192.37 402.31 374.00 1.60 1.57 3.23 -2.70 1.74 3.68 -1.29
Car 0.00 1 2.04 334.85 178.94 624.50 372.04 1.57 1.50 3.68 -1.17 1.65 7.86 1.90
Car 0.34 3 -1.84 937.29 197.39 1241.00 374.00 1.39 1.44 3.08 3.81 1.64 6.15 -1.31
Car 0.00 1 -1.33 597.59 176.18 720.90 261.14 1.47 1.60 3.66 1.07 1.55 14.44 -1.25
Car 0.00 0 1.74 741.18 168.83 792.25 208.43 1.70 1.63 4.08 7.24 1.55 33.20 1.95
Car 0.00 0 -1.65 884.52 178.31 956.41 240.18 1.59 1.59 2.47 8.48 1.75 19.96 -1.25
将其画在000008.png上为,
import cv2
img = cv2.imread(img_s)
with open(label_s) as f:
lines = f.read().split("\n")[:-1]
for item in lines:
boxes = item.split()[4:8]
boxes = [float(x) for x in boxes]
bb = np.array(boxes, dtype=np.int32)
cv2.rectangle(img, bb[:2], bb[-2:], (0,0,255), 1)
cv2.imwrite("/xx/xx/data/code/mmdetection3d/demo/data/kitti/08_res.png", img)

看左下角两个检测框,边缘部分标注的并不好。
对应的点云数据为:
KITTI3D目标检测的数据标签给出的3D中心点的坐标是在左目彩色相机坐标系中。
使用Open3D可视化检测框的代码可以参考,
"""
from https://github.com/dtczhl/dtc-KITTI-For-
Beginners.git
"""
import matplotlib.pyplot as plt
import matplotlib.image as mping
import numpy as np
import os
import open3d as o3d
import open3d.visualization as o3d_vis
from shapely.geometry import Point
from shapely.geometry.polygon import Polygon
MARKER_COLOR = {
'Car': [1, 0, 0], # red
'DontCare': [0, 0, 0], # black
'Pedestrian': [0, 0, 1], # blue
'Van': [1, 1, 0], # yellow
'Cyclist': [1, 0, 1], # magenta
'Truck': [0, 1, 1], # cyan
'Misc': [0.5, 0, 0], # maroon
'Tram': [0, 0.5, 0], # green
'Person_sitting': [0, 0, 0.5]} # navy
# image border width
BOX_BORDER_WIDTH = 5
# point size
POINT_SIZE = 0.005
def show_object_in_image(img_filename, label_filename):
img = mping.imread(img_filename)
with open(label_filename) as f_label:
lines = f_label.readlines()
for line in lines:
line = line.strip('\n').split()
left_pixel, top_pixel, right_pixel, bottom_pixel = [int(float(line[i])) for i in range(4, 8)]
box_border_color = MARKER_COLOR[line[0]]
for i in range(BOX_BORDER_WIDTH):
img[top_pixel+i, left_pixel:right_pixel, :] = box_border_color
img[bottom_pixel-i, left_pixel:right_pixel, :] = box_border_color
img[top_pixel:bottom_pixel, left_pixel+i, :] = box_border_color
img[top_pixel:bottom_pixel, right_pixel-i, :] = box_border_color
plt.imshow(img)
plt.show()
def show_object_in_point_cloud(point_cloud_filename, label_filename, calib_filename):
pc_data = np.fromfile(point_cloud_filename, ') # little-endian float32
pc_data = np.reshape(pc_data, (-1, 4))
cloud = o3d.geometry.PointCloud()
cloud.points = o3d.utility.Vector3dVector(pc_data[:,:-1])
pc_color = np.ones((len(pc_data), 3))
calib = load_kitti_calib(calib_filename)
rot_axis = 2
with open(label_filename) as f_label:
lines = f_label.readlines()
bboxes_3d = []
for line in lines:
line = line.strip('\n').split()
point_color = MARKER_COLOR[line[0]]
veloc, dims, rz, box3d_corner = camera_coordinate_to_point_cloud(line[8:15], calib['Tr_velo_to_cam'])
bboxes_3d.append(np.concatenate((veloc, dims, np.array([rz]))))
bboxes_3d = np.array(bboxes_3d)
print(bboxes_3d.shape)
lines = []
for i in range(len(bboxes_3d)):
center = bboxes_3d[i, 0:3]
dim = bboxes_3d[i, 3:6]
yaw = np.zeros(3)
yaw[rot_axis] = bboxes_3d[i, 6]
rot_mat = o3d.geometry.get_rotation_matrix_from_xyz(yaw)
# bottom center to gravity center
center[rot_axis] += dim[rot_axis] / 2
box3d = o3d.geometry.OrientedBoundingBox(center, rot_mat, dim)
line_set = o3d.geometry.LineSet.create_from_oriented_bounding_box(
box3d)
line_set.paint_uniform_color(np.array(point_color) / 255.)
lines.append(line_set)
for i, v in enumerate(pc_data):
if point_in_cube(v[:3], box3d_corner) is True:
pc_color[i, :] = point_color
cloud.colors = o3d.utility.Vector3dVector(pc_color)
o3d_vis.draw([*lines, cloud])
def point_in_cube(point, cube):
z_min = np.amin(cube[:, 2], 0)
z_max = np.amax(cube[:, 2], 0)
if point[2] > z_max or point[2] < z_min:
return False
point = Point(point[:2])
polygon = Polygon(cube[:4, :2])
return polygon.contains(point)
def load_kitti_calib(calib_file):
"""
This script is copied from https://github.com/AI-liu/Complex-YOLO
"""
with open(calib_file) as f_calib:
lines = f_calib.readlines()
P0 = np.array(lines[0].strip('\n').split()[1:], dtype=np.float32)
P1 = np.array(lines[1].strip('\n').split()[1:], dtype=np.float32)
P2 = np.array(lines[2].strip('\n').split()[1:], dtype=np.float32)
P3 = np.array(lines[3].strip('\n').split()[1:], dtype=np.float32)
R0_rect = np.array(lines[4].strip('\n').split()[1:], dtype=np.float32)
Tr_velo_to_cam = np.array(lines[5].strip('\n').split()[1:], dtype=np.float32)
Tr_imu_to_velo = np.array(lines[6].strip('\n').split()[1:], dtype=np.float32)
return {'P0': P0, 'P1': P1, 'P2': P2, 'P3': P3, 'R0_rect': R0_rect,
'Tr_velo_to_cam': Tr_velo_to_cam.reshape(3, 4),
'Tr_imu_to_velo': Tr_imu_to_velo}
def camera_coordinate_to_point_cloud(box3d, Tr):
"""
This script is copied from https://github.com/AI-liu/Complex-YOLO
"""
def project_cam2velo(cam, Tr):
T = np.zeros([4, 4], dtype=np.float32)
T[:3, :] = Tr
T[3, 3] = 1
T_inv = np.linalg.inv(T)
lidar_loc_ = np.dot(T_inv, cam)
lidar_loc = lidar_loc_[:3]
return lidar_loc.reshape(1, 3)
def ry_to_rz(ry):
angle = -ry - np.pi / 2
if angle >= np.pi:
angle -= np.pi
if angle < -np.pi:
angle = 2 * np.pi + angle
return angle
h, w, l, tx, ty, tz, ry = [float(i) for i in box3d]
cam = np.ones([4, 1])
cam[0] = tx
cam[1] = ty
cam[2] = tz
t_lidar = project_cam2velo(cam, Tr)
Box = np.array([[-l / 2, -l / 2, l / 2, l / 2, -l / 2, -l / 2, l / 2, l / 2],
[w / 2, -w / 2, -w / 2, w / 2, w / 2, -w / 2, -w / 2, w / 2],
[0, 0, 0, 0, h, h, h, h]])
rz = ry_to_rz(ry)
rotMat = np.array([
[np.cos(rz), -np.sin(rz), 0.0],
[np.sin(rz), np.cos(rz), 0.0],
[0.0, 0.0, 1.0]])
velo_box = np.dot(rotMat, Box)
cornerPosInVelo = velo_box + np.tile(t_lidar, (8, 1)).T
box3d_corner = cornerPosInVelo.transpose()
dims = np.array([l, w, h])
# t_lidar: the x, y coordinator of the center of the object
# box3d_corner: the 8 corners
print(t_lidar.shape)
return t_lidar.reshape(-1), dims, rz, box3d_corner.astype(np.float32)
if __name__ == '__main__':
# updates
ROOT = "/media/lx/data/code/mmdetection3d/demo/data/kitti"
IMG_DIR = f'{ROOT}/image_2'
LABEL_DIR = f'{ROOT}/label_2'
POINT_CLOUD_DIR = f'{ROOT}/velo'
CALIB_DIR = f'{ROOT}/calib'
# id for viewing
file_id = 8
img_filename = os.path.join(IMG_DIR, '{0:06d}.png'.format(file_id))
label_filename = os.path.join(LABEL_DIR, '{0:06d}.txt'.format(file_id))
pc_filename = os.path.join(POINT_CLOUD_DIR, '{0:06d}.bin'.format(file_id))
calib_filename = os.path.join(CALIB_DIR, '{0:06d}.txt'.format(file_id))
# show object in image
show_object_in_image(img_filename, label_filename)
# show object in point cloud
show_object_in_point_cloud(pc_filename, label_filename, calib_filename)
可视化的结果为:

以上,就可以对KITTI数据集用于3D目标检测任务的情况有一个基本的认识了,后面用到多模态的时候再补充如何结合2D检测框一起来做目标的识别和定位。
- 1.https://www.cvlibs.net/datasets/kitti/eval_object.php?obj_benchmark=3d
- 2.https://github.com/dtczhl/dtc-KITTI-For-
Beginners.git