Kafka集群与消息可靠性
Kafka集群搭建实战
使用两台Linux服务器:一台192.68.10.7 一台192.168.10.8
192.68.10.7 的配置信息修改



192.168.10.8的配置信息修改



Kafka集群原理
成员关系与控制器
控制器其实就是一个broker, 只不过它除了具有一般 broker的功能之外, 还负责分区首领的选举。
当控制器发现一个broker加入集群时, 它会使用 broker ID来检査新加入的 broker是否包含现有分区的副本。 如果有, 控制器就把变更通知发送给新加入的 broker和其他 broker, 新 broker上的副本开始从首领那里复制消息。
简而言之, Kafka使用 Zookeeper的临时节点来选举控制器,并在节点加入集群或退出集群时通知控制器。 控制器负责在节点加入或离开集群时进行分区首领选举。
从下面的两台启动日志中可以明显看出,192.168.10.7 这台服务器是控制器。
![]()
![]()
集群工作机制
复制功能是 Kafka 架构的核心。在 Kafka 的文档里, Kafka 把自己描述成“一个分布式的、可分区的、可复制的提交日志服务”。
复制之所以这么关键, 是因为它可以在个别节点失效时仍能保证 Kafka 的可用性和持久性。
Kafka 使用主题来组织数据, 每个主题被分为若干个分区,每个分区有多个副本。那些副本被保存在 broker 上, 每个 broker 可以保存成百上千个属于 不同主题和分区的副本。
replication-factor参数
比如我们创建一个lijin的主题,复制因子是2,分区数是2
./kafka-topics.sh --bootstrap-server 192.168.10.7:9092 --create --topic lijin --replication-factor 2 --partitions 2
replication-factor用来设置主题的副本数。每个主题可以有多个副本,副本位于集群中不同的 broker 上,也就是说副本的数量不能超过 broker 的数量。

从这里可以看出,lijin分区有两个分区,partition0和partition1 ,其中
在partition0 中,broker1(broker.id =0)是Leader,broker2(broker.id =1)是跟随副本。
在partition1 中,broker2(broker.id =1)是Leader,broker1(broker.id =0)是跟随副本。
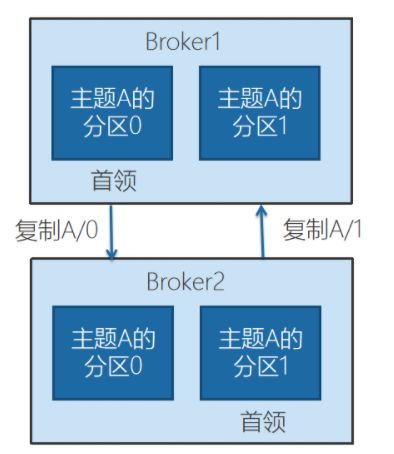
首领副本
每个分区都有一个首领副本。为了保证一致性,所有生产者请求和消费者请求都会经过这个副本 。
跟随者副本
首领以外的副本都是跟随者副本。跟随者副本不处理来自客户端的请求,它们唯一一的任务就是从首领那里复制消息, 保持与首领一致的状态 。 如果首领发生崩溃, 其中的一个跟随者会被提升为新首领 。
auto.leader.rebalance.enable参数
是否允许定期进行 Leader 选举。
设置它的值为true表示允许Kafka定期地对一些Topic 分区进行Leader重选举,当然这个重选举不是无脑进行的,它要满足一定的条件才会发生。
比如Leader A一直表现得很好,但若auto.leader.rebalance.enable=true,那么有可能一段时间后Leader A就要被强行卸任换成Leader B。
你要知道换一次Leader 代价很高的,原本向A发送请求的所有客户端都要切换成向B发送请求,而且这种换Leader本质上没有任何性能收益,因此建议在生产环境中把这个参数设置成false。
集群消息生产
复制系数、不完全的首领选举、最少同步副本
可靠系统里的生产者
发送确认机制,3种不同的确认模式。
-
acks=0 意味着如果生产者能够通过网络把消息发送出去,那么就认为消息已成功写入Kafka 。
-
acks=1 意味若首领在收到消息并把它写入到分区数据文件(不一定同步到磁盘上)时会返回确认或错误响应。
-
acks=all 意味着首领在返回确认或错误响应之前,会等待(min.insync.replicas)同步副本都收到悄息。
ISR
Kafka的数据复制是以Partition为单位的。而多个备份间的数据复制,通过Follower向Leader拉取数据完成。从一这点来讲,有点像Master-Slave方案。不同的是,Kafka既不是完全的同步复制,也不是完全的异步复制,而是基于ISR的动态复制方案。
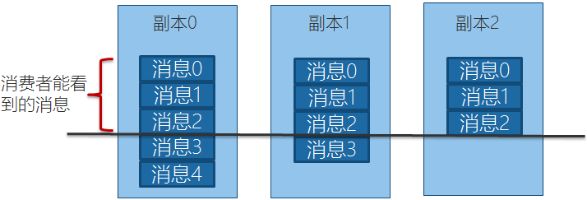
ISR,也即In-Sync Replica。每个Partition的Leader都会维护这样一个列表,该列表中,包含了所有与之同步的Replica(包含Leader自己)。每次数据写入时,只有ISR中的所有Replica都复制完,Leader才会将其置为Commit,它才能被Consumer所消费。
这种方案,与同步复制非常接近。但不同的是,这个ISR是由Leader动态维护的。如果Follower不能紧“跟上”Leader,它将被Leader从ISR中移除,待它又重新“跟上”Leader后,会被Leader再次加加ISR中。每次改变ISR后,Leader都会将最新的ISR持久化到Zookeeper中。
至于如何判断某个Follower是否“跟上”Leader,不同版本的Kafka的策略稍微有些区别。
从0.9.0.0版本开始,replica.lag.max.messages被移除,故Leader不再考虑Follower落后的消息条数。另外,Leader不仅会判断Follower是否在replica.lag.time.max.ms时间内向其发送Fetch请求,同时还会考虑Follower是否在该时间内与之保持同步。
示例
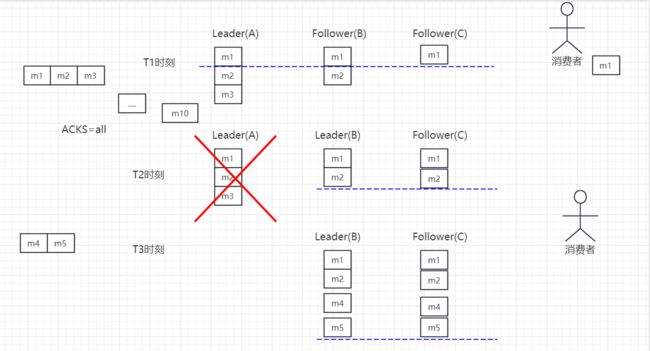
在第一步中,Leader A总共收到3条消息,但由于ISR中的Follower只同步了第1条消息(m1),故只有m1被Commit,也即只有m1可被Consumer消费。此时Follower B与Leader A的差距是1,而Follower C与Leader A的差距是2,虽然有消息的差距,但是满足同步副本的要求保留在ISR中。
在第二步中,由于旧的Leader A宕机,新的Leader B在replica.lag.time.max.ms时间内未收到来自A的Fetch请求,故将A从ISR中移除,此时ISR={B,C}。同时,由于此时新的Leader B中只有2条消息,并未包含m3(m3从未被任何Leader所Commit),所以m3无法被Consumer消费。
使用ISR方案的原因
由于Leader可移除不能及时与之同步的Follower,故与同步复制相比可避免最慢的Follower拖慢整体速度,也即ISR提高了系统可用性。
ISR中的所有Follower都包含了所有Commit过的消息,而只有Commit过的消息才会被Consumer消费,故从Consumer的角度而言,ISR中的所有Replica都始终处于同步状态,从而与异步复制方案相比提高了数据一致性。
ISR相关配置说明
Broker的min.insync.replicas参数指定了Broker所要求的ISR最小长度,默认值为1。也即极限情况下ISR可以只包含Leader。但此时如果Leader宕机,则该Partition不可用,可用性得不到保证。
只有被ISR中所有Replica同步的消息才被Commit,但Producer发布数据时,Leader并不需要ISR中的所有Replica同步该数据才确认收到数据。Producer可以通过acks参数指定最少需要多少个Replica确认收到该消息才视为该消息发送成功。acks的默认值是1,即Leader收到该消息后立即告诉Producer收到该消息,此时如果在ISR中的消息复制完该消息前Leader宕机,那该条消息会丢失。而如果将该值设置为0,则Producer发送完数据后,立即认为该数据发送成功,不作任何等待,而实际上该数据可能发送失败,并且Producer的Retry机制将不生效。
更推荐的做法是,将acks设置为all或者-1,此时只有ISR中的所有Replica都收到该数据(也即该消息被Commit),Leader才会告诉Producer该消息发送成功,从而保证不会有未知的数据丢失。
总结一下
设置acks=all,且副本数为3
极端情况1:
默认min.insync.replicas=1,极端情况下如果ISR中只有leader一个副本时满足min.insync.replicas=1这个条件,此时producer发送的数据只要leader同步成功就会返回响应,如果此时leader所在的broker crash了,就必定会丢失数据!这种情况不就和acks=1一样了!所以我们需要适当的加大min.insync.replicas的值。
极端情况2:
min.insync.replicas=3(等于副本数),这种情况下要一直保证ISR中有所有的副本,且producer发送数据要保证所有副本写入成功才能接收到响应!一旦有任何一个broker crash了,ISR里面最大就是2了,不满足min.insync.replicas=3,就不可能发送数据成功了!
根据这两个极端的情况可以看出min.insync.replicas的取值,是kafka系统可用性和数据可靠性的平衡!
减小 min.insync.replicas 的值,一定程度上增大了系统的可用性,允许kafka出现更多的副本broker crash并且服务正常运行;但是降低了数据可靠性,可能会丢数据(极端情况1)。
增大 min.insync.replicas 的值,一定程度上增大了数据的可靠性,允许一些broker crash掉,且不会丢失数据(只要再次选举的leader是从ISR中选举的就行);但是降低了系统的可用性,会允许更少的broker crash(极端情况2)。