第16章_瑞萨MCU零基础入门系列教程之CAN 协议
本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第16章 CAN 协议
本章目标
- 了解 CAN 协议的基本常识以及和 CAN-FD 的差异;
- 了解 CAN-FD 协议的帧格式;
16.1 CAN 协议概要
瑞萨对于CAN协议的入门写了一本很好的入门书,是面向CAN总线初学者。对于CAN是什么、CAN的特征、标准规格下的位置分布等、CAN的概要及CAN的协议都进行了说明。
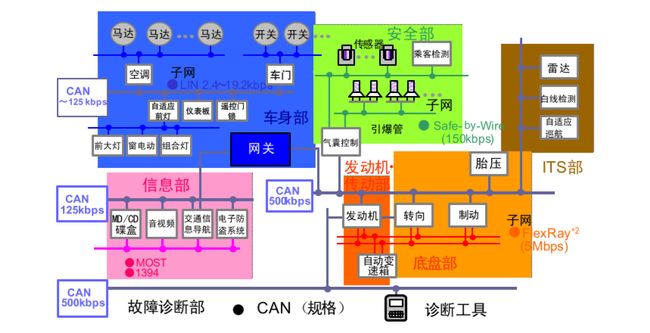
CAN是Controller Area Network 的缩写,是ISO国际标准化的串行通信协议。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。为适应“减少线束的数量”、“通过多个LAN,进行大量数据的高速通信”的需要,1986年德国电气商博世公司开发出面向汽车的CAN通信协议。此后,CAN通过ISO11898 及ISO11519进行了标准化,现在在欧洲已是汽车网络的标准协议。
现在,CAN的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。
16.2 CAN FD 简介
CAN协议自1986年问世以来就很流行:如今几乎任何可移动的机器都使用CAN,无论是汽车、卡车、轮船、飞机还是机器人。但是随着现代科技的兴起,对“传统”的CAN协议(ISO11898-1:2015中使用的官方术语)的要求越来越高:
- 通常整车CAN网络负载大大超过推荐值(50%)
- CAN消息中只有大约40-50%的带宽用于实际数据传输
- 总线速率通常被限制在1Mbit/s,在实际使用中的速度更低,大多数情况下为500Kbit/s;在J1939网络中使用250Kbit/s
- 最大总线速度受响应机制限制,即错误帧,ACK等
- ACK延迟 = 收发器延迟+总线传播延迟
基于上述缺点,最直接的办法就是使用下一代总线FlexRay,这样可以一劳永逸的解决这一难题。但如果将原来所有的CAN节点全部升级为FlexRay节点,带来巨大的硬件开销,软件通讯移植开发,以及漫长的开发周期。
具体而言,传统CAN的开销很大(>50%),因为每个CAN数据帧只能包含8个数据字节。此外,网络速度限制为1Mbit/s,从而限制了数据生成功能的实现。CAN FD解决了这些问题,使其具有前瞻性。
为了缩小CAN网络(Max:1MBit/s)与FlexRay(Max:10MBit/s)网络的带宽差距,BOSCH推出了CAN FD方案。CAN FD(CAN with Flexible Data rate)继承了CAN总线的主要特性。

16.3 CAN-FD 协议解析
16.3.1 CAN-FD 的优势
CAN 总线采用双线串行通讯协议,基于非破坏性仲裁技术,分布式实时控制,可靠的错误处理和检测机制使 CAN 总线有很高的安全性,但 CAN 总线带宽和数据场长度却受到制约。CAN FD 总线弥补了 CAN 总线带宽和数据场长度的制约,CAN FD 总线与 CAN 总线的区别主要表现在:
- 可变速率
CAN FD 采用了两种位速率:从控制场中的 BRS 位到 ACK 场之前(含 CRC 分界符)为可变速率,其余部分为原 CAN 总线用的速率。两种速率各有一套位时间定义寄存器,它们除了采用不同的位时间单位 TQ 外,位时间各段的分配比例也可不同。
- 新的数据场长度
CAN FD 对数据场的长度作了很大的扩充,DLC 最大支持 64 个字节,在 DLC 小于等于 8时与原 CAN 总线是一样的,大于 8 时有一个非线性的增长,所以最大的数据场长度可达 64字节。
16.3.2 CAN-FD 帧格式
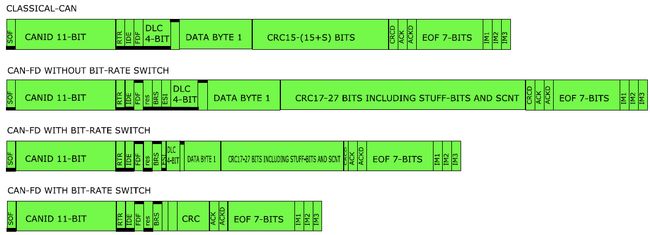
与普通 CAN 报文相同,CAN FD 报文一共具有,帧起始 SOF,仲裁段,控制段,数据域,CRC 域,ACK 域,帧结束,共七个部分组成。
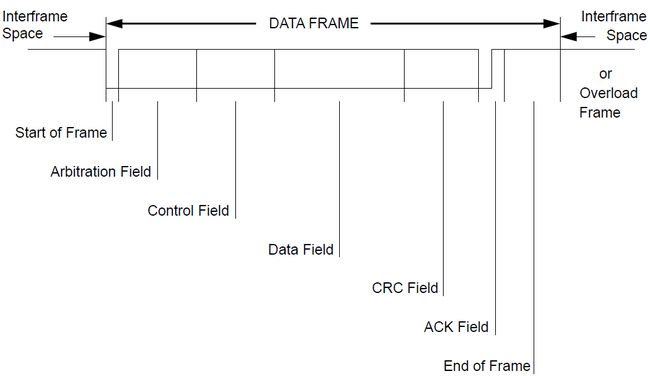

CAN与CANFD使用相同的SOF标志位来标志报文的起始。帧起始由单个显性位构成,标志着报文的开始,并在总线上起着同步作用。
- CAN-FD的仲裁域
与传统CAN相比,CAN FD取消了对远程帧的支持,用RRS位替换了RTR位,为常显性。IDE位仍为标准帧和扩展帧标志位,若标准帧与扩展帧具有相同的前11位ID,那么标准帧将会由于IDE位为0,优先获得总线。
- RTR(Remote Transmission Request Bit):远程发送请求位,RER位在数据帧里必须是显性,而在远程帧里为隐性。
- RRS(Remote Request Substitution):远程请求替换位,即传统CAN中的RTR位,CAN FD中为常显性。
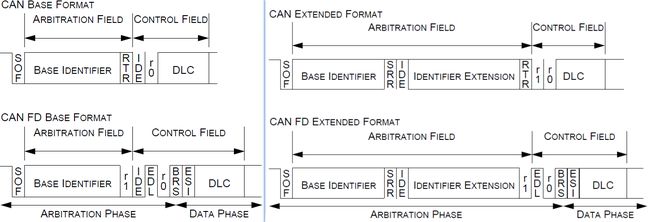
- CAN-FD的控制域
控制域中CANFD与CAN有着相同的IDE,res,DLC位。同时增加了三个控制bit位,FDF、BRS、ESI。
- FDF(Flexible Data Rate Format):原CAN数据帧中的保留位r。FDF常为隐性,表示CAN FD报文。
- BRS( Bit Rate Switch):位速率转换开关,当BRS为显性位时数据段的位速率与仲裁段的位速率一致,当BRS为隐性位时数据段的位速率高于仲裁段的位速率。
- ESI(Error State Indicator):错误状态指示,主动错误时发送显性位,被动错误时发送隐性位。
- DLC数据域长度位,CAN FD同样使用4bit来确认报文数据场的长度。
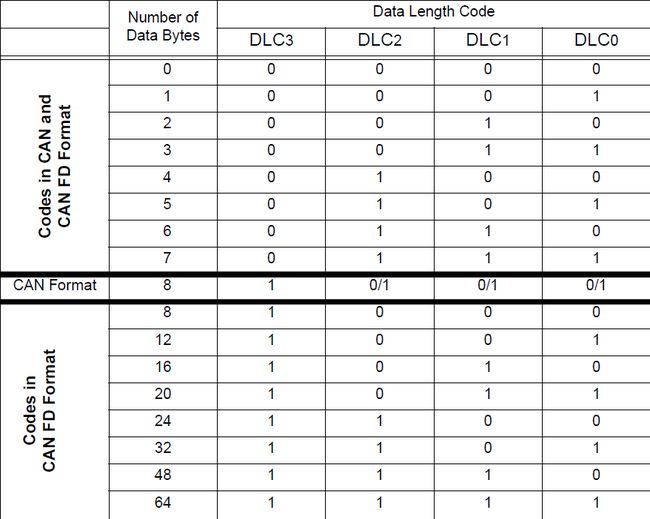
- AN-FD的数据域
CAN FD不仅能支持传统的0-8字节报文,同时最大还能支持12,16,20,24,32,48,64字节。