input子系统框架、外设驱动开发
一、input子系统基本框架
Linux内核为了两个目的:
- 简化纯输入类外设(如:键盘、鼠标、游戏杆、轨迹球、触摸屏。。。等等)的驱动开发
- 统一输入类外设产生的数据格式(struct input_event),更加方便应用层编程
设计了输入子系统
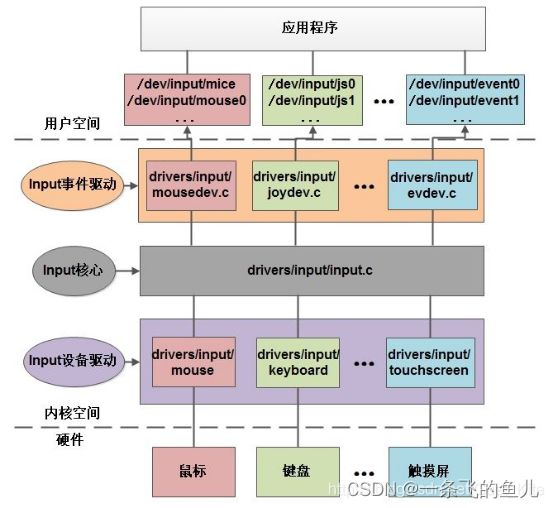
事件处理层:接收来自核心层上报的事件,并选择对应的handler(事件处理器 struct input_handler)去处理。内核维护着多个事件处理器对象,每个input_handler对象专门处理一类事件,所有产生同类事件的设备驱动共用同一个handler。
设备驱动层:主要实现获取硬件设备的数据信息(包括触摸屏被按下、按下位置、鼠标移动、键盘按下等等),并转换为核心层定义的规范事件后提交给核心层,该层每个设备对应一个struct input_dev对象,
核心层:负责连接设备驱动层和事件处理层,为设备驱动层提供输入设备驱动的接口(struct input_dev)以及输入设备驱动的注册函数(input_register_device),为事件处理层提供输入事件驱动的接口;通知事件处理层对事件进行处理。
二、驱动开发步骤
/*init或probe函数中:
1. 创建struct input_dev对象input_allocate_device
2. 设置事件类型以及相关参数set_bit
3. 注册struct input_dev对象input_register_device
*/
/*exit或remove函数中:
1. 注销struct input_dev对象input_unregister_device
2. 销毁struct input_dev对象input_free_device
*/
/*上报事件
两种事件上报方式:
1. 对有中断支持的输入设备:在其中断处理函数(上半部或下半部)中上报事件
2. 对无中断支持的输入设备:使用workqueue循环定时上报(struct delayed_work)
主要函数:
input_event
input_report_abs
input_sync
*/
相关接口:
/*_init*/
struct input_dev *input_allocate_device(void)//创建对象
void set_bit(struct input_dev *dev,unsigned long whichbits)//设置事件类型
void input_set_abs_params(struct input_dev *dev,unsigned int axis,int min,int max,int fuzz,int flat)
int input_register_device(struct input_dev *dev)//注册input设备到内核
/*_exit*/
void input_unregister_device(struct input_dev *dev)
void input_free_device(struct input_dev *dev)
/*上报事件*/
void input_event(struct input_dev *,unsigned int t,unsigned int c,int v)
void input_report_key(struct input_dev *,unsigned int c,int v) //上报按键事件
void input_report_abs(struct input_dev *,unsigned int c,int v)//上报绝对坐标事件
void input_sync(struct input_dev *)//上报完成后需要调用这些函数来通知系统处理完整事件
/*应用层数据类型*/
struct input_event {
struct timeval time; // 时间戳
__u16 type; // 事件类型
__u16 code; // 哪个分值
__s32 value; // 具体值
};
三、key2-input版代码解析
key2.c
#include testkey2.c
#include 四、mpu6050-input版代码解析
mpu6050drv.c
#include