【Linux】基于美信串行解串器实现UART串口通信
文章目录
- 前言
- 一、环境介绍
- 二、硬件配置
-
- 1. MAX96763
- 2. MAX96752F
- 三、串口通信协议
-
- 1. 帧格式
- 2. 同步帧
- 3. 应答帧
- 4. 包格式(包由帧组成)
- 四、内核模块实现
前言
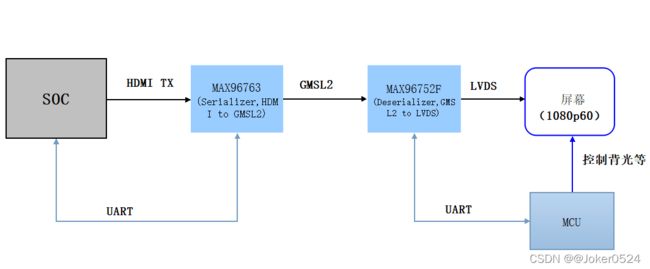
车载项目中串行/解串器是十分常见的外设,目前常用的有两种标准:GMSL(美信家的)、FPD-Link(TI家的)。本次基于美信的一对Ser/Deser实现:串行端将HDMI源视频信号转为GMSL2串行信号,解串端解串后转为LVDS格式连接显示屏,并在屏幕上显示。
一、环境介绍
SOC:Amlogic A311D2
SDK:Amlogic Android 11
Kernel:5.4
Serializer:MAX96763
Deserializer:MAX96752F
系统框图:
二、硬件配置
1. MAX96763
GPIO17/I2CSEL:low(Main Uart mode)
GPIO16/CXTP:low(TP双绞线)
ADD0~ADD2:000(Dev Addr=0x80)
确保:
HPD:high(即SOC的HDMI TX与MAX96763连接上)
PWDNB:high(MAX96763 ready)
2. MAX96752F
GPIO01/I2CSEL:low(Main Uart mode)
GPIO09/CXTP:low(TP双绞线)
ADD0~ADD2:010(Dev Addr=0x98)
确保:
PWDNB:high(MAX96752F ready)
三、串口通信协议
1. 帧格式
START(1bit) : 固定填0
DATA(8bit) : 8位数据
EVEN PARITY(1bit) :1位偶校验,1表示DATA的8位中1的个数为奇数;0表示DATA的8位中1的个数为偶数。
STOP(至少1bit,最多4bit): 固定填1
2. 同步帧
START D0 D1 D2 D3 D4 D5 D6 D7 PARITY STOP
0 1 0 0 1 1 1 1 0 1 1 // 0x79
3. 应答帧
START D0 D1 D2 D3 D4 D5 D6 D7 PARITY STOP
0 1 1 0 0 0 0 1 1 0 1 // 0xC3
4. 包格式(包由帧组成)
写操作(地址帧的bit0置0):
SYNC帧 | DEV ADDR帧(LSB=0) | REG ADDR(MSB) | REG ADDR(LSB) | BYTE COUNT | DATA1 | ········ | DATA N
读操作(地址帧的bit0置1):
SYNC帧 | DEV ADDR帧(LSB=1) | REG ADDR(MSB) | REG ADDR(LSB) | BYTE COUNT
示例:
读MAX96763的DEV ID,即读0x000D寄存器(应返回:C3 B2):
79 81 00 0D 01
读MAX96752F的DEV ID,即读0x000D寄存器(应返回:C3 82):
79 99 00 0D 01
四、内核模块实现
// SPDX-License-Identifier: GPL-2.0
/*
* Author: rentong [email protected]
* Description:This module configs the Maxin serializer and deserializer during kernel startup.
* Version: 1.0 2022/3/26
*/
#include " );
MODULE_DESCRIPTION("This module is used to config MAXIN chips through serial port");
MODULE_LICENSE("GPL");