Doris】Doris SQL 原理解析
本文主要介绍了Doris SQL解析的原理。
重点讲述了生成单机逻辑计划,生成分布式逻辑计划,生成分布式物理计划的过程。对应于代码实现是Analyze,SinglePlan,DistributedPlan,Schedule四个部分。
Analyze负责对AST进行前期的一些处理,SinglePlan根据AST进行优化生成单机查询计划,DistributedPlan将单机的查询计划拆成分布式的查询计划,Schedule阶段负责决定查询计划下发到哪些机器上执行。
由于SQL类型有很多,本文侧重介绍查询SQL的解析,从算法原理和代码实现上深入讲解了Doris的SQL解析原理。
1 Doris简介
Doris是基于MPP架构的交互式SQL数据仓库,主要用于解决近实时的报表和多维分析。
Doris分成两部分FE和BE,FE 负责存储以及维护集群元数据、接收、解析、查询、设计规划整体查询流程,BE 负责数据存储和具体的实施过程。
在 Doris 的存储引擎中,用户数据被水平划分为若干个数据分片(Tablet,也称作数据分桶)。每个 Tablet 包含若干数据行。多个 Tablet 在逻辑上归属于不同的分区Partition。一个 Tablet 只属于一个 Partition。而一个 Partition 包含若干个 Tablet。Tablet 是数据移动、复制等操作的最小物理存储单元。
2 SQL解析简介
SQL解析在这篇文章中指的是将一条sql语句经过一系列的解析最后生成一个完整的物理执行计划的过程。
这个过程包括以下四个步骤:词法分析,语法分析,生成逻辑计划,生成物理计划。
如图1所示:
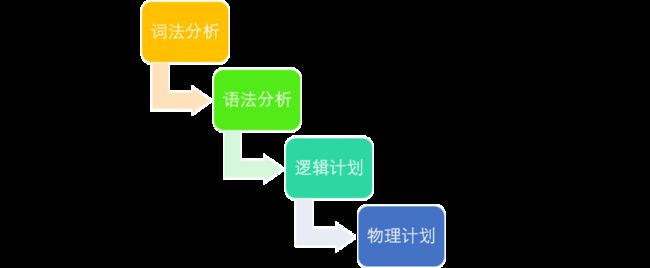
图 1 SQL解析的流程
2.1 词法分析
词法分析主要负责将字符串形式的sql识别成一个个token,为语法分析做准备。
select ...... from ...... where ....... group by ..... order by ......
2.2 语法分析
语法分析主要负责根据语法规则,将词法分析生成的token转成抽象语法树(Abstract Syntax Tree),如图2所示。
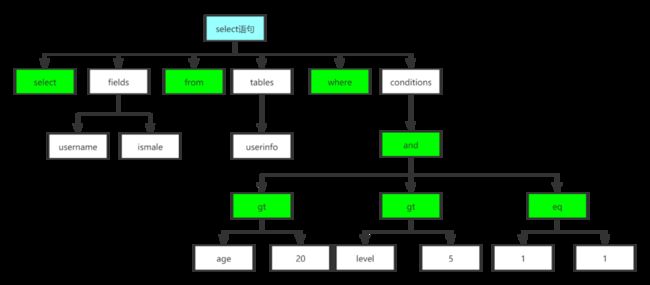
图 2 抽象语法树示例
2.3 逻辑计划
逻辑计划负责将抽象语法树转成代数关系。代数关系是一棵算子树,每个节点代表一种对数据的计算方式,整棵树代表了数据的计算方式以及流动方向,如图3所示。
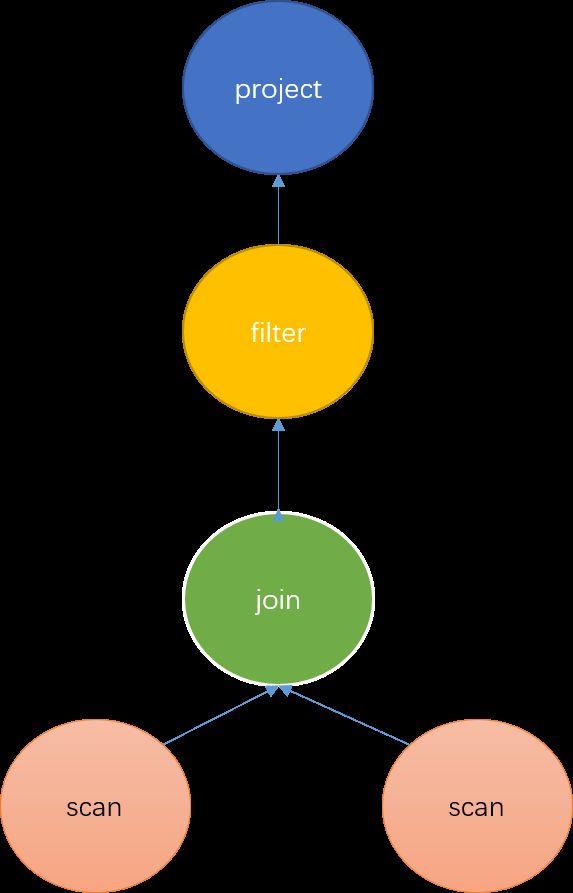
图3 关系代数示例
2.4 物理计划
物理计划是在逻辑计划的基础上,根据机器的分布,数据的分布,决定去哪些机器上执行哪些计算操作。
Doris系统的SQL解析也是采用这些步骤,只不过根据Doris系统结构的特点和数据的存储方式,进行了细化和优化,最大化发挥机器的计算能力。
3 设计目标
Doris SQL解析架构的设计有以下目标:
-
最大化计算的并行性
-
最小化数据的网络传输
-
最大化减少需要扫描的数据
4 总体架构
Doris SQL解析具体包括了五个步骤:词法分析,语法分析,生成单机逻辑计划,生成分布式逻辑计划,生成物理执行计划。
具体代码实现上包含以下五个步骤:Parse, Analyze, SinglePlan, DistributedPlan, Schedule。
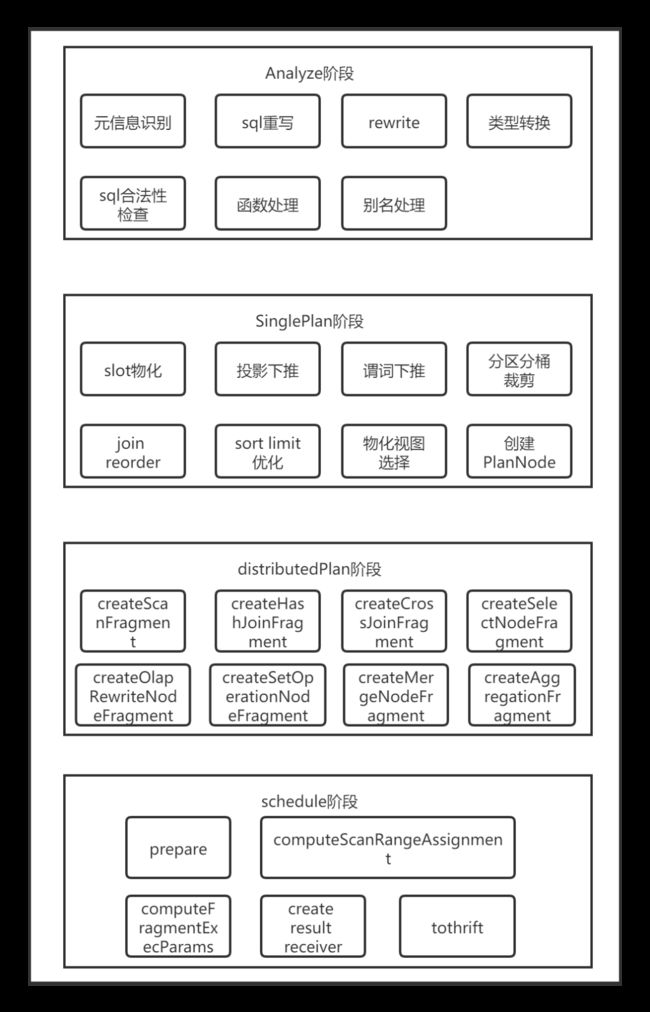
图4 系统总体架构图
如图4所示,Parse阶段本文不详细讲,Analyze负责对AST进行前期的一些处理,SinglePlan根据AST进行优化生成单机查询计划,DistributedPlan将单机的查询计划拆成分布式的查询计划,Schedule阶段负责决定查询计划下发到哪些机器上执行。
由于SQL类型有很多,本文侧重介绍查询SQL的解析。
图5展示了一个简单的查询SQL在Doris的解析实现。
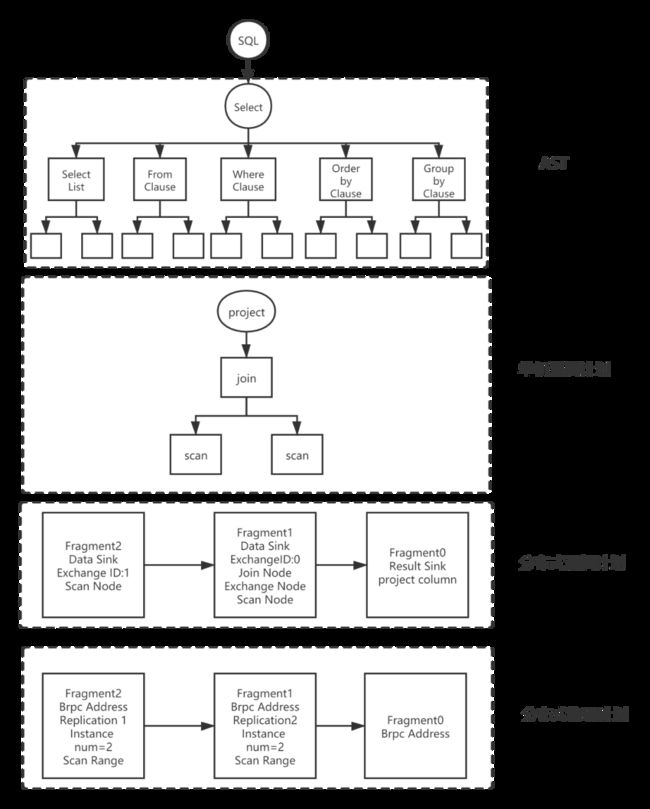
图 5 查询sql在Doris中的解析过程
5 Parse阶段
词法分析采用jflex技术,语法分析采用java cup parser技术,最后生成抽象语法树(Abstract Syntax Tree)AST,这些都是现有的、成熟的技术,在这里不进行详细介绍。
AST是一种树状结构,代表着一条SQL。不同类型的查询select, insert, show, set, alter table, create table等经过Parse阶段后生成不同的数据结构(SelectStmt, InsertStmt, ShowStmt, SetStmt, AlterStmt, AlterTableStmt, CreateTableStmt等),但他们都继承自Statement,并根据自己的语法规则进行一些特定的处理。例如:对于select类型的sql, Parse之后生成了SelectStmt结构。
SelectStmt结构包含了SelectList,FromClause,WhereClause,GroupByClause,SortInfo等结构。这些结构又包含了更基础的一些数据结构,如WhereClause包含了BetweenPredicate(between表达式), BinaryPredicate(二元表达式), CompoundPredicate(and or组合表达式), InPredicate(in表达式)等。
AST中所有结构都是由基本结构表达式Expr通过多种组合而成,如图6所示。
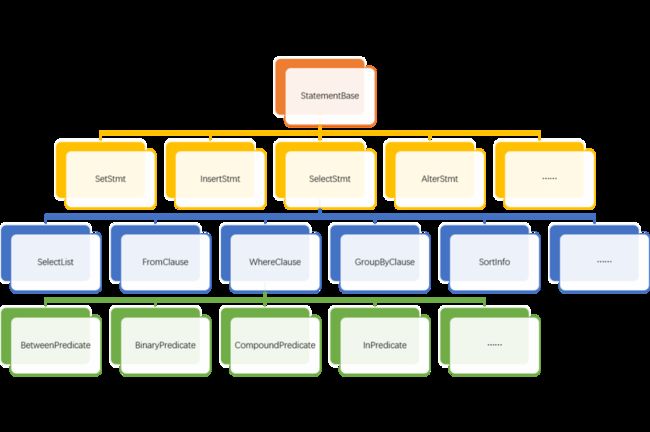
图 6 Doris中抽象语法树AST的实现
6 Analyze阶段
Analyze主要是对Parse阶段生成的抽象语法树AST进行一些前期的处理和语义分析,为生成单机逻辑计划做准备。
抽象语法树是由StatementBase这个抽象类表示。这个抽象类包含一个最重要的成员函数analyze(),用来执行Analyze阶段要做的事。
不同类型的查询select, insert, show, set, alter table, create table等经过Parse阶段后生成不同的数据结构(SelectStmt, InsertStmt, ShowStmt, SetStmt, AlterStmt, AlterTableStmt, CreateTableStmt等),这些数据结构继承自StatementBase,并实现analyze()函数,对特定类型的SQL进行特定的Analyze。
例如:select类型的查询,会转成对select sql的子语句SelectList, FromClause, GroupByClause, HavingClause, WhereClause, SortInfo等的analyze()。然后这些子语句再各自对自己的子结构进行进一步的analyze(),通过层层迭代,把各种类型的sql的各种情景都分析完毕。例如:WhereClause进一步分析其包含的BetweenPredicate(between表达式), BinaryPredicate(二元表达式), CompoundPredicate(and or组合表达式), InPredicate(in表达式)等。
对于查询类型的SQL,包含以下几项重要工作:
**· 元信息的识别和解析:**识别和解析sql中涉及的 Cluster, Database, Table, Column 等元信息,确定需要对哪个集群的哪个数据库的哪些表的哪些列进行计算。
**· SQL 的合法性检查:**窗口函数不能 DISTINCT,投影列是否有歧义,where语句中不能含有grouping操作等。
**· SQL 简单重写:**比如将 select * 扩展成 select 所有列,count distinct转成bitmap或者hll函数等。
**· 函数处理:**检查sql中包含的函数和系统定义的函数是否一致,包括参数类型,参数个数等。
· Table 和 Column 的别名处理
**· 类型检查和转换:**例如二元表达式两边的类型不一致时,需要对其中一个类型进行转换(BIGINT 和 DECIMAL 比较,BIGINT 类型需要 Cast 成 DECIMAL)。
对AST 进行analyze后,会再进行一次rewrite操作,进行精简或者是转成统一的处理方式。目前rewrite的算法是基于规则的方式,针对AST的树状结构,自底向上,应用每一条规则进行重写。如果重写后,AST有变化,则再次进行analyze和rewrite,直到AST无变化为止。
例如:常量表达式的化简:1 + 1 + 1 重写成 3,1 > 2 重写成 Flase 等。将一些语句转成统一的处理方式,比如将 where in, where exists 重写成 semi join, where not in, where not exists 重写成 anti join。
7 生成单机逻辑Plan阶段
这部分工作主要是根据AST抽象语法树生成代数关系,也就是俗称的算子数。树上的每个节点都是一个算子,代表着一种操作。
如图7所示,ScanNode代表着对一个表的扫描操作,将一个表的数据读出来。HashJoinNode代表着join操作,小表在内存中构建哈希表,遍历大表找到连接键相同的值。Project表示投影操作,代表着最后需要输出的列,图7表示只用输出citycode这一列。
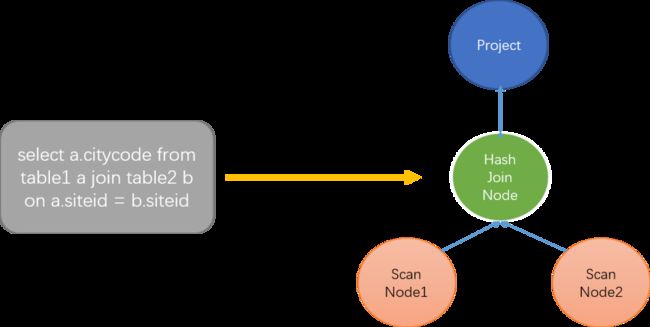
图7 单机逻辑计划示例
如果不进行优化,生成的关系代数下发到存储中执行的代价非常高。
对于查询:
select a.siteid, a.pv from table1 a join table2 b on a.siteid = b.siteid where a.citycode=122216 and b.username="test" order by a.pv limit 10
未优化的关系代数,如图8所示,需要将所有列读出来进行一系列的计算,在最后选择输出siteid, pv两列,大量无用的列数据浪费了计算资源。
Doris在生成代数关系时,进行了大量的优化,将投影列和查询条件尽可能放到扫描操作时执行。
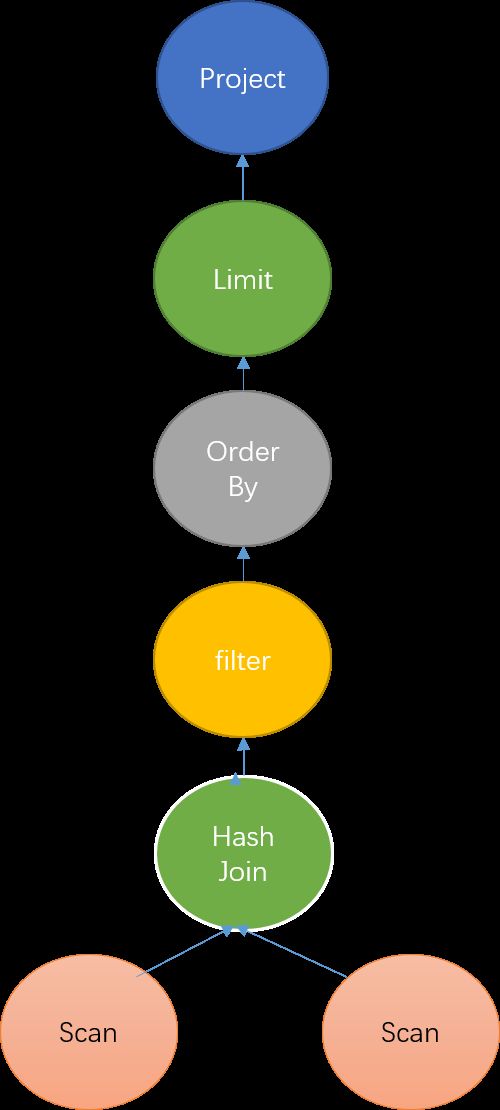
图8 未优化的关系代数
具体来说这个阶段主要做了如下几项工作:
**· Slot 物化:**指确定一个表达式对应的列需要 Scan 和计算,比如聚合节点的聚合函数表达式和 Group By 表达式需要进行物化。
**· 投影下推:**BE 在 Scan 时只会 Scan 必须读取的列。
**· 谓词下推:**在满足语义正确的前提下将过滤条件尽可能下推到 Scan 节点。
**· 分区,分桶裁剪:**根据过滤条件中的信息,确定需要扫描哪些分区,哪些桶的tablet。
**· Join Reorder:**对于 Inner Join, Doris 会根据行数调整表的顺序,将大表放在前面。
**· Sort + Limit 优化成 TopN:**对于order by limit语句会转换成TopN的操作节点,方便统一处理。
**· MaterializedView 选择:**会根据查询需要的列,过滤,排序和 Join 的列,行数,列数等因素选择最佳的物化视图。
图9展示了优化的示例,Doris是在生成关系代数的过程中优化,边生成边优化。
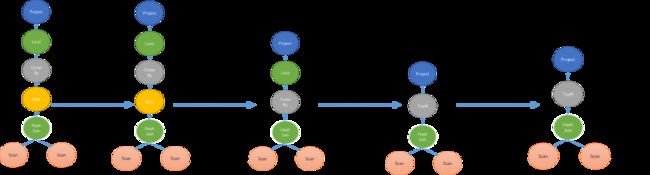
图 9 单机查询计划优化的过程
8 生成分布式Plan阶段
有了单机的PlanNode树之后,就需要进一步根据分布式环境,拆成分布式PlanFragment树(PlanFragment用来表示独立的执行单元),毕竟一个表的数据分散地存储在多台主机上,完全可以让一些计算并行起来。
这个步骤的主要目标是最大化并行度和数据本地化。主要方法是将能够并行执行的节点拆分出去单独建立一个PlanFragment,用ExchangeNode代替被拆分出去的节点,用来接收数据。拆分出去的节点增加一个DataSinkNode,用来将计算之后的数据传送到ExchangeNode中,做进一步的处理。
这一步采用递归的方法,自底向上,遍历整个PlanNode树,然后给树上的每个叶子节点创建一个PlanFragment,如果碰到父节点,则考虑将其中能够并行执行的子节点拆分出去,父节点和保留下来的子节点组成一个parent PlanFragment。拆分出去的子节点增加一个父节点DataSinkNode组成一个child PlanFragment,child PlanFragment指向parent PlanFragment。这样就确定了数据的流动方向。
对于查询操作来说,join操作是最常见的一种操作。
**Doris目前支持4种join算法:**broadcast join,hash partition join,colocate join,bucket shuffle join。
**broadcast join:**将小表发送到大表所在的每台机器,然后进行hash join操作。当一个表扫描出的数据量较少时,计算broadcast join的cost,通过计算比较hash partition的cost,来选择cost最小的方式。
**hash partition join:**当两张表扫描出的数据都很大时,一般采用hash partition join。它遍历表中的所有数据,计算key的哈希值,然后对集群数取模,选到哪台机器,就将数据发送到这台机器进行hash join操作。
**colocate join:**两个表在创建的时候就指定了数据分布保持一致,那么当两个表的join key与分桶的key一致时,就会采用colocate join算法。由于两个表的数据分布是一样的,那么hash join操作就相当于在本地,不涉及到数据的传输,极大提高查询性能。
**bucket shuffle join:**当join key是分桶key,并且只涉及到一个分区时,就会优先采用bucket shuffle join算法。由于分桶本身就代表了数据的一种切分方式,所以可以利用这一特点,只需将右表对左表的分桶数hash取模,这样只需网络传输一份右表数据,极大减少了数据的网络传输,如图10所示。
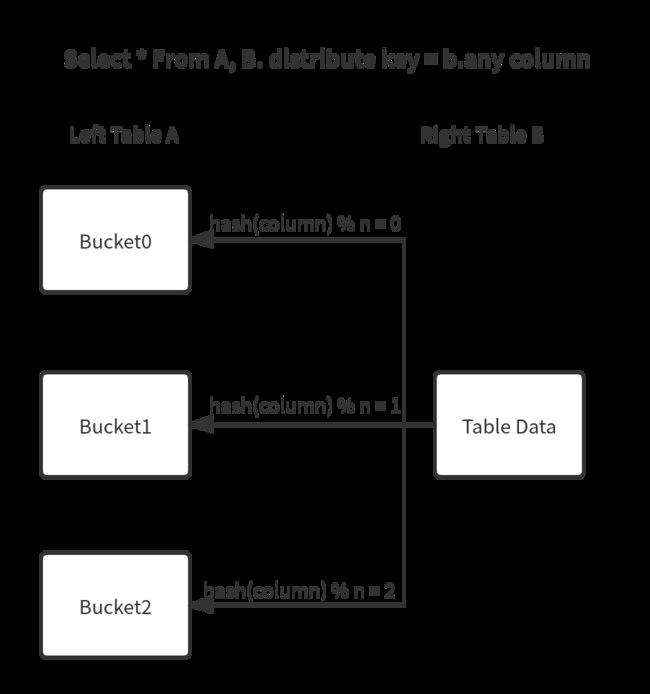
图 10 bucket shuffle join示例
如图11展示了带有HashJoinNode的单机逻辑计划创建分布式逻辑计划的核心流程。
· 对PlanNode,自底向上创建PlanFragment。
· 如果是ScanNode,则直接创建一个PlanFragment,PlanFragment的RootPlanNode是这个ScanNode。
· 如果是HashJoinNode,则首先计算下broadcastCost,为选择boracast join还是hash partition join提供参考。
· 根据不同的条件判断选择哪种Join算法
· 如果使用colocate join,由于join操作都在本地,就不需要拆分。设置HashJoinNode的左子节点为leftFragment的RootPlanNode,右子节点为rightFragment的RootPlanNode,与leftFragment共用一个PlanFragment,删除掉rightFragment。
· 如果使用bucket shuffle join,需要将右表的数据发送给左表。所以先创建了一个ExchangeNode,设置HashJoinNode的左子节点为leftFragment的RootPlanNode,右子节点为这个ExchangeNode,与leftFragment共用一个PlanFragment,并且指定rightFragment数据发送的目的地为这个ExchangeNode。
· 如果使用broadcast join,需要将右表的数据发送给左表。所以先创建了一个ExchangeNode,设置HashJoinNode的左子节点为leftFragment的RootPlanNode,右子节点为这个ExchangeNode,与leftFragment共用一个PlanFragment,并且指定rightFragment数据发送的目的地为这个ExchangeNode。
· 如果使用hash partition join,左表和右边的数据都要切分,需要将左右节点都拆分出去,分别创建left ExchangeNode, right ExchangeNode,HashJoinNode指定左右节点为left ExchangeNode和 right ExchangeNode。单独创建一个PlanFragment,指定RootPlanNode为这个HashJoinNode。最后指定leftFragment, rightFragment的数据发送目的地为left ExchangeNode, right ExchangeNode。
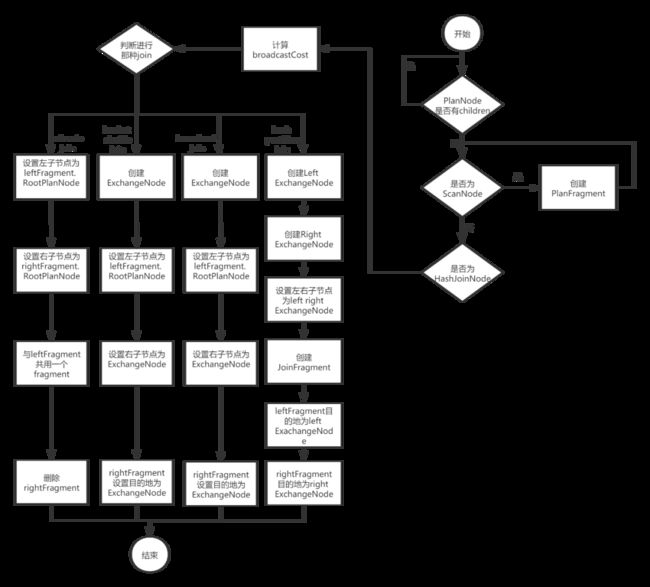
图 11 HashJoinNode创建分布式逻辑计划核心流程
图12是两个表的join操作转换成PlanFragment树之后的示例,一共生成了3个PlanFragment。最终数据的输出通过ResultSinkNode节点。
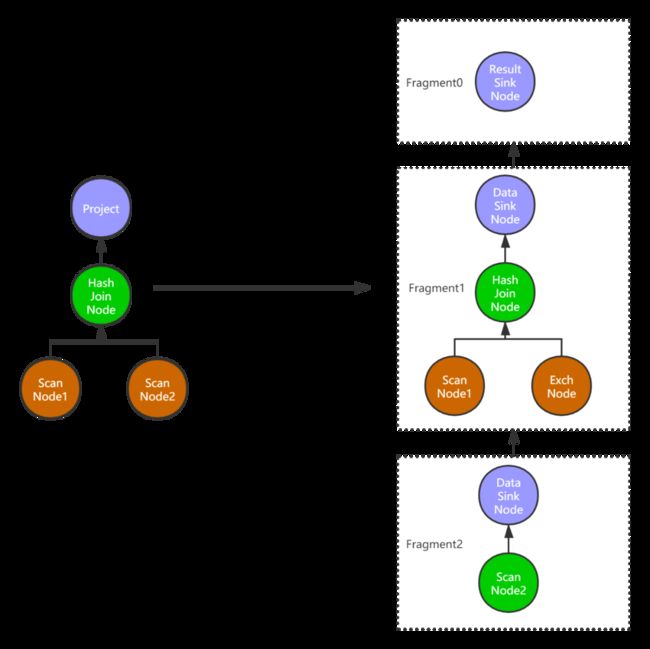
图 12 从单机计划到分布式计划
9 Schedule阶段
这一步是根据分布式逻辑计划,创建分布式物理计划。主要解决以下问题:
-
哪个 BE 执行哪个 PlanFragment
-
每个 Tablet 选择哪个副本去查询
-
如何进行多实例并发
图13展示了创建分布式物理计划的核心流程:
**a. prepare阶段:**给每个PlanFragment创建一个FragmentExecParams结构,用来表示PlanFragment执行时所需的所有参数;如果一个PlanFragment包含有DataSinkNode,则找到数据发送的目的PlanFragment,然后指定目的PlanFragment的FragmentExecParams的输入为该PlanFragment的FragmentExecParams。
**b. computeScanRangeAssignment阶段:**针对不同类型的join进行不同的处理。
-
**computeScanRangeAssignmentByColocate:**针对colocate join进行处理,由于join的两个表桶中的数据分布都是一样的,他们是基于桶的join操作,所以在这里是确定每个桶选择哪个host。在给host分配桶时,尽量保证每个host分配到的桶基本平均。
-
**computeScanRangeAssignmentByBucket:**针对bucket shuffle join进行处理,也只是基于桶的操作,所以在这里是确定每个桶选择哪个host。在给host分配桶时,同样需要尽量保证每个host分配到的桶基本平均。
-
**computeScanRangeAssignmentByScheduler:**针对其他类型的join进行处理。确定每个scanNode读取tablet哪个副本。一个scanNode会读取多个tablet,每个tablet有多个副本。为了使scan操作尽可能分散到多台机器上执行,提高并发性能,减少IO压力,Doris采用了Round-Robin算法,使tablet的扫描尽可能地分散到多台机器上去。例如100个tablet需要扫描,每个tablet 3个副本,一共10台机器,在分配时,保障每台机器扫描10个tablet。
**c. computeFragmentExecParams阶段:**这个阶段解决PlanFragment下发到哪个BE上执行,以及如何处理实例并发问题。确定了每个tablet的扫描地址之后,就可以以地址为维度,将FragmentExecParams生成多个实例,也就是FragmentExecParams中包含的地址有多个,就生成多个实例FInstanceExecParam。如果设置了并发度,那么一个地址的执行实例再进一步的拆成多个FInstanceExecParam。针对bucket shuffle join和colocate join会有一些特殊处理,但是基本思想一样。FInstanceExecParam创建完成后,会分配一个唯一的ID,方便追踪信息。如果FragmentExecParams中包含有ExchangeNode,需要计算有多少senders,以便知道需要接受多少个发送方的数据。最后FragmentExecParams确定destinations,并把目的地址填充上去。
**d. create result receiver阶段:**result receiver是查询完成后,最终数据需要输出的地方。
**e. to thrift阶段:**根据所有PlanFragment的FInstanceExecParam创建rpc请求,然后下发到BE端执行。这样一个完整的SQL解析过程完成了。
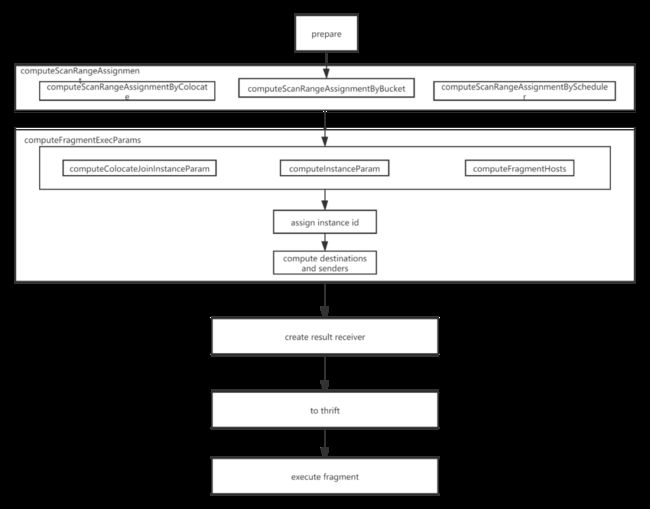
图 13 创建分布式物理计划核心流程
如图14所示是一个简单示例,图中的PlanFrament包含了一个ScanNode,ScanNode扫描3个tablet,每个tablet有2副本,集群假设有2台host。
computeScanRangeAssignment阶段确定了需要扫描replica 1,3,5,8,10,12,其中replica 1,3,5位于host1上,replica 8,10,12位于host2上。
如果全局并发度设置为1时,则创建2个实例FInstanceExecParam,下发到host1和host2上去执行,如果如果全局并发度设置为3,这个host1上创建3个实例FInstanceExecParam,host2上创建3个实例FInstanceExecParam,每个实例扫描一个replica,相当于发起6个rpc请求。
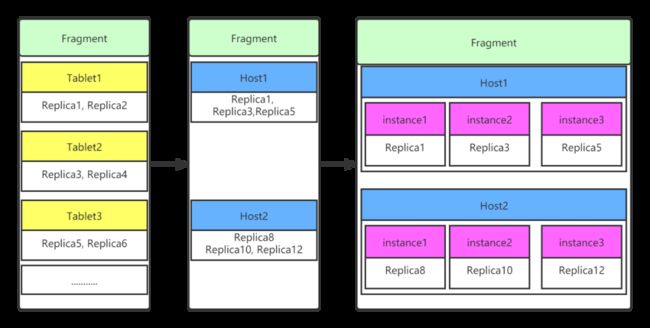
图 14 生成物理计划的过程
10 总结
本文首先简单介绍了Doris,然后介绍SQL解析的通用流程:词法分析,语法分析,生成逻辑计划,生成物理计划,接着从总体上介绍了Doris在SQL解析这块的总体架构,最后详细讲解了Parse,Analyze,SinglePlan,DistributedPlan,Schedule等5个过程,从算法原理和代码实现上进行了深入的讲解。
Doris遵守了SQL解析的常用方法,但根据底层存储架构,以及分布式的特点,在SQL解析这块进行了大量的优化,实现了最大并行度和最小化网络传输,给SQL执行层面减少很多负担。