嵌入式 - 基础
嵌入式 - 基础
- 存储器
-
- RAM(随机存储器)
- ROM(只读存储器)
- IO口/寄存器/CPU
- 定时器
-
- 例子 - 定时器控制流水灯
- 定时器与中断
- 定时器与计数器
- 定时器系统时钟
- 中断
-
- 工作流程
- 中断源
- 定时器与中断
- 外设例子
-
- LED控制
- 数码管显示
- 按键
- 延时
-
- 代码
- 定时器 - 补充代码
-
- 代码1 配置定时器0和定时器1
- 代码2 使用定时器的方法 查询按键是否被按下
存储器
RAM(随机存储器)
易失性存储器:掉电丢失数据
存取速度快
- SRAM(静态RAM):电路存储数据;速度最快,容量小
- DRAM(动态RAM):电容(充放电)存储数据;容易漏电,需要扫描电路,成本低,容量大
ROM(只读存储器)
非易失性存储器:掉电不丢失数据
存取速度慢
- Mask ROM(掩膜ROM):早起ROM,用电路存储数据 (芯片做好就是这个电路,读出来的就是这个数据)
- PROM(可编程ROM):生产出来之后,只能写入一次,不能再次更改
- EPROM(可擦除可编程ROM):可以擦除(但是需要紫外线照射擦除)
- E2PROM(电可擦除可编程ROM):直接控制程序可以擦除,
- Flash(闪存):现代ROM
- 硬盘、软盘、光盘

IO口/寄存器/CPU
IO口电平和寄存器之间的交互可以通过以下步骤进行:
输出数据到IO口:当CPU需要向外部设备输出数据时,它会将数据写入指定的寄存器。这个寄存器通常称为输出寄存器或数据寄存器。CPU将要输出的数据写入到该寄存器中。
控制IO口电平:一旦数据被写入输出寄存器,CPU需要通过控制信号来改变IO口的电平状态。通常,CPU会通过控制寄存器或控制线信号来发出特定的命令,以控制IO口电平的变化。
IO口电平的改变:根据CPU发出的控制信号,IO口的电平会相应地改变。例如,如果CPU要将IO口设置为高电平,相关的控制信号会使外部设备电平变为高电平。反之,如果CPU要将IO口设置为低电平,控制信号会使外部设备电平变为低电平。
输入数据到寄存器:当外部设备的电平状态发生变化时(例如,另一个设备向CPU发送数据),IO口的电平变化会被检测到,并通过相应的电路传输到输入寄存器或数据寄存器。CPU可以通过读取该寄存器来获取输入的数据。
总结起来,CPU通过写入输出寄存器来设置数据的传输值,通过控制信号来控制IO口电平的改变,外部设备根据电平状态的变化将数据输入到输入寄存器或数据寄存器,CPU再通过读取该寄存器来获取输入的数据。这样实现了IO口电平和寄存器之间的交互。
定时器
https://www.bilibili.com/video/BV1k84y1v7q9/?spm_id_from=333.788&vd_source=7155082256127a432d5ed516a6423e20
51原理图
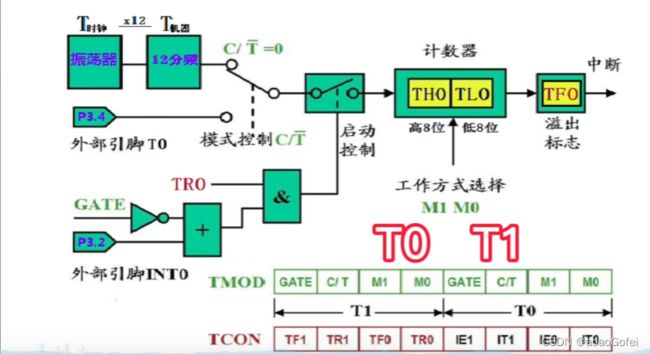

定时器/计数
编程实现

例子 - 定时器控制流水灯
#include 定时器与中断

定时器与计数器
时钟系统由外部引脚提供的时候,就是计数器
定时器系统时钟
系统时钟就是晶振周期,不等于机器周期
对于分频的系统时钟,12T表示12分频,对于晶振周期是12MHZ的时钟系统,12分频后就是1MHZ,一个机器周期就是1us(1微秒)
中断

工作流程
其中一步:程序记录在ROM中, 记录断点就是记录程序语句被打断的存放的寄存器的地址(将要执行的中断语句地址,压入堆栈,中断程序返回后,再弹出堆栈)
![]()
中断源
引起CPU中断的根源:中断源
用于中断(打断)程序
中断优先:
分时操作:CPU分时执行I/O操作
实时响应:立即执行中断响应
可靠性
51单片机
一共有五个中断源


优先级
当多个中断源对CPU执行中断请求的时候,CPU根据中断源的优先级执行对应的中断请求
单片机内有默认的优先级别,也可以修改对应寄存器的值来修改优先级
嵌套
永远执行优先级高的中断 (例:在执行中断优先级低的中断程序B中,发生了一个更高优先级的中断请求C,那么则中断B,执行C,执行完成C后,在返回执行B)
定时器与中断

时钟系统,来一个脉冲,计数系统就+1
** 例子 !!!**
#include 例子2
#include 代码优化
TMOD=TMOD&0xF0; TMOD=TMOD|0x01;代替TMOD=0x01;防止高四位被修改
外设例子
LED控制
#include
}
/* === exp6: two key control led switch === */
if (P3_1==0)
{
DelayXms(20); // delay 20ms to filter
while (P3_1==0); // key up is turn off
DelayXms(20); // delay 20ms to filter
ledNum++;
if (ledNum>=8)
{
ledNum=0;
}
P2=~(0x01<<ledNum);
}
else if (P3_0==0)
{
DelayXms(20); // delay 20ms to filter
while (P3_0==0); // key up is turn off
DelayXms(20); // delay 20ms to filter
if (ledNum==0)
{
ledNum=7;
}
else
{
ledNum--;
}
P2=~(0x01<<ledNum);
}
}
}
数码管显示
// main.c
#include
// {
// i = 12;
// j = 169;
// do
// {
// while (--j);
// } while (--i);
// }
//}
//void ledDriverShowSwitch(bool isTurnOnAll)
//{
// if (isTurnOnAll)
// {
// for (int i=0;i<8;i++)
// {
//
// }
// }
//}
//void ledDriverShow(unsigned char pos,unsigned char num)
//{
// if (pos<0 || pos>7 )
// {
// return;
// }
//
// if (num<0 || num >10)
// {
// return;
// }
//
// // position
// // pos use littleEnd
// pos=7-pos;
// P2_2=(pos) & 0x01;
// P2_3=(pos>>1) & 0x01;
// P2_4=(pos>>2) & 0x01;
//
// // number
// switch(num)
// {
// case 0:
// P0=LED0;
// break;
// case 1:
// P0=LED1;
// break;
// case 2:
// P0=LED2;
// break;
// case 3:
// P0=LED3;
// break;
// case 4:
// P0=LED4;
// break;
// case 5:
// P0=LED5;
// break;
// case 6:
// P0=LED6;
// break;
// case 7:
// P0=LED7;
// break;
// case 8:
// P0=LED8;
// break;
// case 9:
// P0=LED9;
// break;
// default:
// P0=LEDDOT;
// break;
// }
//
// // Prevent data misalignment
DelayXms(1);
// P0=0x00; // set zero to clear
//}
void main()
{
/********************************************/
/*** scan mode to update digit tube data ****/
/********************************************/
/* === exp1: set digit led ,pos 3,num 6 === */
//74HC138 decoder
// 0000 0101=5 set Y4(led6) on
// P2_4=1;
// P2_3=0;
// P2_2=1;
//
// P0=0x7D; // set led digit tube: digit 6
// while(1)
// {
//
// }
/* === exp2: use function set digit led ,pos x,num y === */
while (1)
{
int i=0;
for (;i<8;i++)
{
ledDriverShow(i,i);
// DelayXms(50);
}
}
}
// ledControl.h
#ifndef __LEDCONTROL_H__
#define __LEDCONTROL_H__
#include 按键
#ifndef __KEY_H__
#define __KEY_H__
#include // key.cpp
#include "key.h"
unsigned char getKeyNumber()
{
unsigned char keyNumber=0;
if (P3_1==0){DelayXms(20);while (P3_1==0);DelayXms(20);keyNumber=1;}
if (P3_0==0){DelayXms(20);while (P3_0==0);DelayXms(20);keyNumber=2;}
if (P3_2==0){DelayXms(20);while (P3_2==0);DelayXms(20);keyNumber=3;}
if (P3_3==0){DelayXms(20);while (P3_3==0);DelayXms(20);keyNumber=4;}
return keyNumber;
}
延时
代码
// delay.h
#ifndef __DELAY_H__
#define __DELAY_H__
void DelayXms(unsigned int xms); //@12.000MHz
#endif
// delay.c
#include "delay.h"
void DelayXms(unsigned int xms) //@12.000MHz
{
unsigned char data i, j;
unsigned int xms_num=0;
while (xms_num++<xms)
{
i = 12;
j = 169;
do
{
while (--j);
} while (--i);
}
}
定时器 - 补充代码
代码1 配置定时器0和定时器1
#ifndef __MYTIMER_H__
#define __MYTIMER_H__
#include // myTimer.c
#include "myTimer.h"
void initTimer(unsigned char number,unsigned char mode,unsigned short initValue)
{
if (number==0) // timer 0
{
/* timer work mode register TMOD */
TMOD=TMOD&0xF0;
switch (mode)
{
case 1:
TMOD=TMOD|0x01; // 0000 0001
break;
case 2:
TMOD=TMOD|0x02; // 0000 0010
break;
default:
TMOD=TMOD|0x00;
break;
}
/* timer control register TCON */
/* interrupt overflow flag */
TF0=0;
setTimerInitValue(number,initValue);
/* interrupt enable register IE*/
/* set interrupt enable flag*/
EA=1;
ET0=1;
PT0=0;
/* timer0 start*/ // TCON
TR0=1;
}
else if (number==1) // timer 1
{
/* timer work mode register TMOD */
TMOD=TMOD&0xF0;
switch (mode)
{
case 1:
TMOD=TMOD|0x10; // 0001 0000
break;
case 2:
TMOD=TMOD|0x20; // 0010 0000
break;
default:
TMOD=TMOD|0x00;
break;
}
/* timer control register TCON */
/* interrupt overflow flag */
TF1=0;
setTimerInitValue(number,initValue);
/* interrupt enable register IE*/
/* set interrupt enable flag*/
EA=1;
ET1=1;
PT0=0;
/* timer0 start*/
TR1=1;
}
}
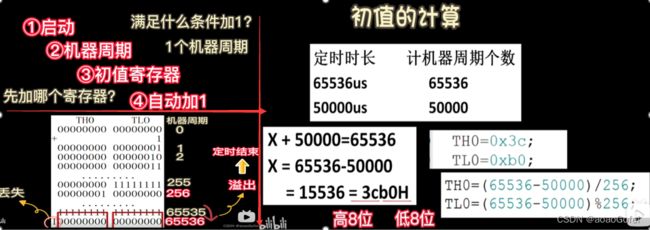
void setTimerInitValue(unsigned char number,unsigned short initValue)
{
if (number==0)
{
/* set timer count init value */
TH0=((unsigned char)(initValue>>8))&0xFF; // 1000us=1ms
TL0=(unsigned char)(initValue&0xFF);
}
else if (number==1)
{
/* set timer count init value */
TH1=((unsigned char)(initValue>>8))&0xFF; // 1000us=1ms
TL1=(unsigned char)(initValue&0xFF);
}
}
代码2 使用定时器的方法 查询按键是否被按下
ledControl.h 数码管
#ifndef __LEDCONTROL_H__
#define __LEDCONTROL_H__
#include ledControl.c 数码管
#include "ledControl.h"
#include "delay.h"
void ledDriverShow(unsigned char pos,unsigned char num)
{
if (pos<0 || pos>7 )
{
return;
}
if (num<0 || num >10)
{
return;
}
// position
// pos use littleEnd
pos=7-pos;
P2_2=(pos) & 0x01;
P2_3=(pos>>1) & 0x01;
P2_4=(pos>>2) & 0x01;
// number
switch(num)
{
case 0:
P0=LED0;
break;
case 1:
P0=LED1;
break;
case 2:
P0=LED2;
break;
case 3:
P0=LED3;
break;
case 4:
P0=LED4;
break;
case 5:
P0=LED5;
break;
case 6:
P0=LED6;
break;
case 7:
P0=LED7;
break;
case 8:
P0=LED8;
break;
case 9:
P0=LED9;
break;
default:
P0=LEDDOT;
break;
}
// Prevent data misalignment
DelayXms(1);
P0=0x00; // set zero to clear
}
key.h
#ifndef __KEY_H__
#define __KEY_H__
#include key.c
#include "key.h"
static unsigned char keyNumber_finalget=0;
unsigned char getKeyNumber()
{
unsigned char keyNumber=0;
if (P3_1==0){DelayXms(20);while (P3_1==0);DelayXms(20);keyNumber=1;}
if (P3_0==0){DelayXms(20);while (P3_0==0);DelayXms(20);keyNumber=2;}
if (P3_2==0){DelayXms(20);while (P3_2==0);DelayXms(20);keyNumber=3;}
if (P3_3==0){DelayXms(20);while (P3_3==0);DelayXms(20);keyNumber=4;}
return keyNumber;
}
unsigned char getKeyState()
{
unsigned char keyNumber=0;
if (P3_1==0){keyNumber=1;}
if (P3_0==0){keyNumber=2;}
if (P3_2==0){keyNumber=3;}
if (P3_3==0){keyNumber=4;}
return keyNumber;
}
void keyInterruptLoop()
{
static unsigned char prekeyState=0;
static unsigned char currkeyState=0;
prekeyState=currkeyState;
currkeyState=getKeyState();
// think more
// noly check release or not, i.e. from press to release
if (prekeyState==1 && currkeyState==0)
{
keyNumber_finalget=1;
}
else if (prekeyState==2 && currkeyState==0)
{
keyNumber_finalget=2;
}
else if (prekeyState==3 && currkeyState==0)
{
keyNumber_finalget=3;
}
else if (prekeyState==4 && currkeyState==0)
{
keyNumber_finalget=4;
}
}
unsigned char getFinalKeyNumber()
{
unsigned char keyNumber_temp=0;
keyNumber_temp=keyNumber_finalget;
keyNumber_finalget=0; // clear; keep keyNumber_finalget is 0;
return keyNumber_temp;
}
main.c
#include