高云FPGA系列教程(9):cmd-parser串口命令解析器移植
文章目录
-
- @[toc]
-
- cmd-parser库简介
- cmd-parser库源码获取
- GW1NSR-4C移植cmd-parser
- 实际测试
- cmd-parse命令解析器优化
文章目录
-
- @[toc]
-
- cmd-parser库简介
- cmd-parser库源码获取
- GW1NSR-4C移植cmd-parser
- 实际测试
- cmd-parse命令解析器优化
本文是高云FPGA系列教程的第9篇文章。
上一篇文章介绍片上ARM Cortex-M3硬核处理器串口外设的使用,演示轮询方式和中断方式接收串口数据,并进行回环测试。
本文在上一篇工程的基础上,移植cmd-parser串口命令解析器,到高云GW1NSR-4C ARM处理器上,实现3个命令:
led_on:点亮LED
led_off:熄灭LED
get_sysclk:查询处理器频率
参考文档:Gowin_EMPU(GW1NS-4C)软件编程 参考手册
cmd-parser库简介
cmd-parser,是一款非常轻量、高效的命令解析器,作者jiejie,整个项目只有两个文件:cmd.c和cmd.h,采用哈希算法进行匹配,匹配速度非常快,占用资源也很少。
cmd-parser遵循 Apache License v2.0 开源协议。鼓励代码共享和尊重原作者的著作权,可以自由的使用、修改源代码,也可以将修改后的代码作为开源或闭源软件发布,但必须保留原作者版权声明。
开源地址:
//Gitee
https://gitee.com/jiejieTop/cmd-parser
//Github
https://github.com/jiejieTop/cmd-parser
国内推荐使用Gitee码云平台访问。
cmd-parser库源码获取
访问以上开源地址下载cmd-parse源码,或通过如下命令clone到本地:
$ git clone https://gitee.com/jiejietop/cmd-parser.git --depth=1
Cloning into 'cmd-parser'...
remote: Enumerating objects: 8, done.
remote: Counting objects: 100% (8/8), done.
remote: Compressing objects: 100% (7/7), done.
remote: Total 8 (delta 0), reused 8 (delta 0), pack-reused 0
Receiving objects: 100% (8/8), 7.39 KiB | 7.39 MiB/s, done.
整个项目非常简单,只有两个文件是我们需要的,可以参考README文档和示例来帮助我们完成移植。

GW1NSR-4C移植cmd-parser
首先把cmd.c和cmd.h添加到用户目录,并在Keil环境添加到工程中。

串口初始化,并使能接收中断:
void uart0_init(uint32_t BaudRate)
{
UART_InitTypeDef UART_InitStruct;
NVIC_InitTypeDef InitTypeDef_NVIC;
UART_InitStruct.UART_Mode.UARTMode_Tx = ENABLE;
UART_InitStruct.UART_Mode.UARTMode_Rx = ENABLE;
UART_InitStruct.UART_Int.UARTInt_Tx = DISABLE;
UART_InitStruct.UART_Int.UARTInt_Rx = ENABLE; //开启接收中断
UART_InitStruct.UART_Ovr.UARTOvr_Tx = DISABLE;
UART_InitStruct.UART_Ovr.UARTOvr_Rx = DISABLE;
UART_InitStruct.UART_Hstm = DISABLE;
UART_InitStruct.UART_BaudRate = BaudRate;//Baud Rate
UART_Init(UART0, &UART_InitStruct);
//Enable UART0 interrupt handler
InitTypeDef_NVIC.NVIC_IRQChannel = UART0_IRQn;
InitTypeDef_NVIC.NVIC_IRQChannelPreemptionPriority = 1;
InitTypeDef_NVIC.NVIC_IRQChannelSubPriority = 1;
InitTypeDef_NVIC.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&InitTypeDef_NVIC);
}
void UART0_Handler(void)
{
char rx = 0;
if(UART_GetRxIRQStatus(UART0) == SET)
{
rx = UART_ReceiveChar(UART0);
buf[buf_idx] = rx;
buf_idx++;
cnt_idle = 0;
}
UART_ClearRxIRQ(UART0);
}
定义3个用户命令和对应执行的函数,并通过REGISTER_CMD宏完成命令注册。
void led_on(void)
{
gpio_write(0xaaaa);
}
void led_off(void)
{
gpio_write(0);
}
void get_sysclk(void)
{
printf("SystemCoreClock = %d\r\n", SystemCoreClock);
printf("APB1 CLK = %d\r\n", PCLK1);
printf("APB2 CLK = %d\r\n", PCLK2);
printf("AHB CLK = %d\r\n", HCLK);
}
REGISTER_CMD(led_on, led_on);
REGISTER_CMD(led_off, led_off);
REGISTER_CMD(get_sysclk, get_sysclk);
主函数中当收到串口命令时进行解析,并执行对应的函数:
int main(void)
{
cmd_init();
delay_init();
uart0_init(115200); //enable rx interrupt
printf("SystemCoreClock = %d\r\n", SystemCoreClock);
printf("APB1 CLK = %d\r\n", PCLK1);
printf("APB2 CLK = %d\r\n", PCLK2);
printf("AHB CLK = %d\r\n", HCLK);
printf("Hello GW1NSR-4C SoC(ARM Cortex-M3)\r\n");
printf("UART0 cmd-parser Example\r\n");
while(1)
{
//长时间没有接收到串口数据
if(buf_idx != 0)
cnt_idle++;
else
cnt_idle = 0;
if(cnt_idle > 5000) //明显感觉=500000
{
cmd_parsing((char *)buf);//命令解析并执行
printf("cmd: %s\r\n", buf);
cnt_idle = 0;
buf_idx = 0;
memset(buf, 0, sizeof(buf)/sizeof(buf[0]));
}
}
}
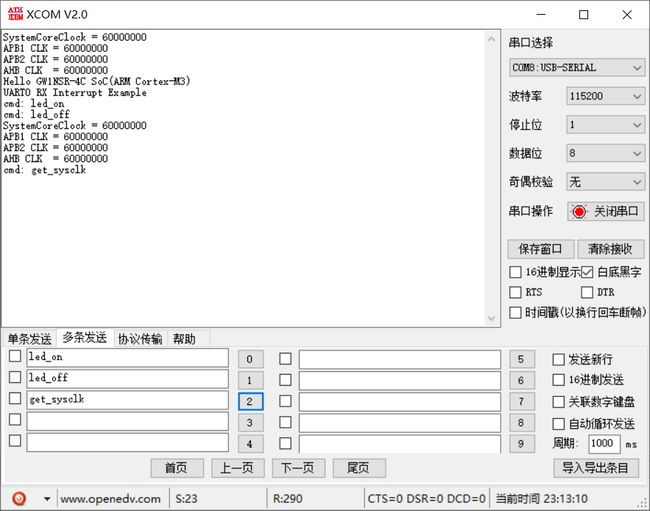
实际测试
编译,下载,运行。发送对应的串口命令,可以看到执行了对应的功能。
cmd-parse命令解析器优化
为了满足部分带返回值的函数支持,我们对源代码进行一点改动,注册的回调函数改为int类型返回值:
//typedef void (*cmd_handler)(void);
typedef int (*cmd_handler)(void);
//void cmd_parsing(char *str)
int cmd_parsing(char *str)
{
cmd_t *index;
unsigned int hash = _cmd_hash(str);
for (index = _cmd_begin; index < _cmd_end; index = _get_next_cmd(index)) {
if (hash == index->hash) {
if (_cmd_match(str, index->cmd) == 0) {
// index->handler();
return index->handler();
break;
}
}
}
}
同样,对用户函数也进行修改:
#include "main.h"
uint8_t rx = 0;
uint8_t buf[256];
uint16_t buf_idx = 0;
uint32_t cnt_idle = 0;
uint8_t flag = 0;
int ret = 0;
int led_on(void)
{
gpio_write(0xaaaa);
return 0;
}
int led_off(void)
{
gpio_write(0);
return 1;
}
int get_sysclk(void)
{
printf("SystemCoreClock = %d\r\n", SystemCoreClock);
printf("APB1 CLK = %d\r\n", PCLK1);
printf("APB2 CLK = %d\r\n", PCLK2);
printf("AHB CLK = %d\r\n", HCLK);
return -1;
}
REGISTER_CMD(led_on, led_on);
REGISTER_CMD(led_off, led_off);
REGISTER_CMD(get_sysclk, get_sysclk);
int main(void)
{
cmd_init();
delay_init();
uart0_init(115200); //enable rx interrupt
printf("SystemCoreClock = %d\r\n", SystemCoreClock);
printf("APB1 CLK = %d\r\n", PCLK1);
printf("APB2 CLK = %d\r\n", PCLK2);
printf("AHB CLK = %d\r\n", HCLK);
printf("Hello GW1NSR-4C SoC(ARM Cortex-M3)\r\n");
printf("UART0 RX Interrupt Example\r\n");
while(1)
{
//长时间没有接收到串口数据
if(buf_idx != 0)
cnt_idle++;
else
cnt_idle = 0;
if(cnt_idle > 5000) //明显感觉=500000
{
ret = cmd_parsing((char *)buf);//命令解析并执行
printf("cmd: %s, ret = %d\r\n", buf, ret);
cnt_idle = 0;
buf_idx = 0;
memset(buf, 0, sizeof(buf)/sizeof(buf[0]));
}
}
}
测试结果:

本文是高云FPGA系列教程的第9篇文章。