数据结构 | 第十二章:优先级队列 | 堆 | 左高树 | 堆排序 | 霍夫曼编码
文章目录
-
- 12.1 定义和应用
- 12.2 抽象数据类型
-
- ADT
- 抽象类
- 12.3 线性表
- 12.4 堆
-
- 定义
- 操作(图解+代码)
-
- 小根堆的定义及实现
-
- 数组长度变换函数
- 小根堆的插入
- 小根堆的删除
- 小根堆的初始化
- 12.5 左高树
-
- 定义
-
- `扩充二叉树`
- `高度优先左高树(HBLT)`
- `重量优先左高树(WBLT)`
- 操作
-
- 类`maxHblt`
-
- 最大HBLT的插入
- 最大HBLT的删除
- 两棵HBLT的合并
- 最大HBLT的初始化
- 补充erase、clearTree函数
- 12.6 应用
-
- 12.6.1 堆排序
- 12.6.3 霍夫曼编码
12.1 定义和应用
优先级队列(priority queue)是0个或多个元素的集合,每个元素都有一个优先级或值。
-
与
FIFO队列(先入先出)不同:优先级队列中元素出队列的顺序由元素的优先级决定 -
最小优先级队列:“查找/删除”操作用来“查找/删除”优先级最小的元素。 -
最大优先级队列:“查找/删除”操作用来“查找/删除”优先级最大的元素。 -
优先级队列中的元素可以有相同的优先级。
12.2 抽象数据类型
ADT
抽象数据类型MaxPriorityOueue
{
实例
有限个元素集合,每个元素都有一个优先级
操作
empty():判断优先级队列是否为空,为空时返回true
Size():返回队列中的元素数目
top():返回优先级最大的元素
pop():删除优先级最大的元素
push(x):插入元素x
}
抽象类
class maxPriorityQueue
{
public:
virtual ~maxPriorityQueue(){}
//判断优先级队列是否为空,为空时返回true
virtual bool empty()const = 0;
//返回队列中的元素数目
virtual int size()const = 0;
//返回优先级最大的元素
virtual const T& top() = 0;
//删除优先级最大的元素
virtual void pop() = 0;
//插入元素theElement
virtual void push(const T& theElement) = 0;
};
优先级队列的描述:线性表、堆、左高树
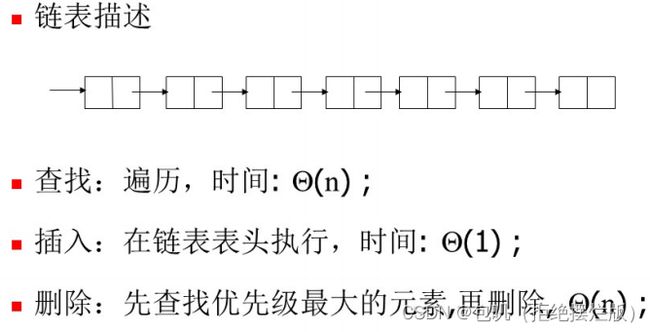
12.3 线性表
采用无序线性表描述最大优先级队列

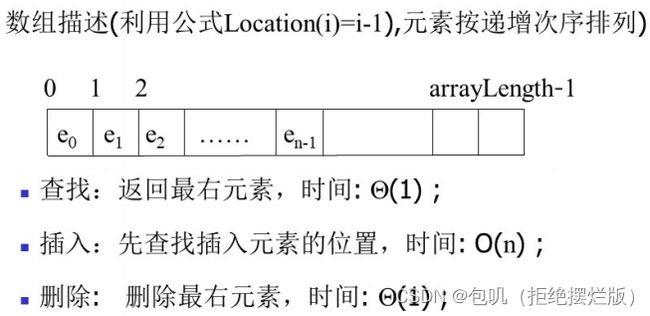
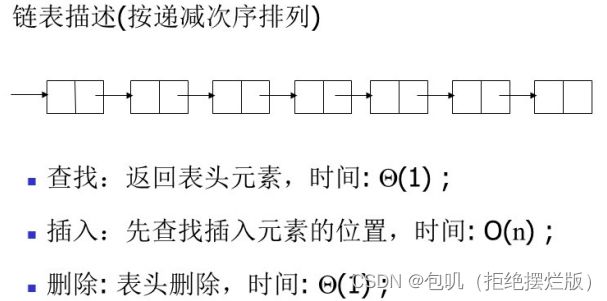
采用有序线性表描述最大优先级队列
12.4 堆
定义
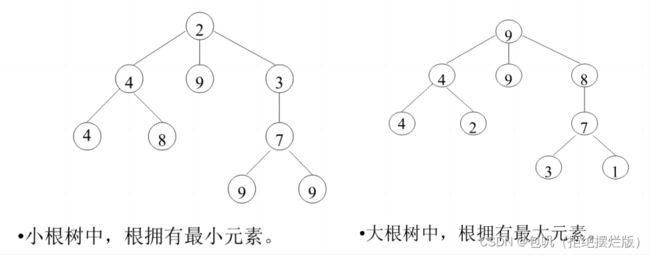
大根树(小根树):每个节点的值都大于(小于)或等于其子节点(如果有的话)值的树。
大根树或小根树节点的子节点个数可以大于2
大根堆(小根堆):既是大根树(小根树),又是完全二叉树

操作(图解+代码)
小根堆的定义及实现
template<class T>
class minHeap
{
public:
minHeap(int initialCapacity = 10)
{//构造
arrayLength = initialCapacity + 1;
heap = new T[arrayLength];
heapSize = 0;
}
~minHeap() { delete[] heap; }//析构
const T& top()
{//返回优先级最大的元素的引用
return heap[1];
}
void pop();//删除
void push(const T&theElement);//插入
void initialize(T*theHeap, int theSize);//初始化
void output(ostream& out) const;//输出
private:
T* heap;//一个类型为T的一维数组
int arrayLength;//数组heap的容量
int heapSize;//堆的元素个数
};
数组长度变换函数
//将一个一维数组的长度从oldLength变成newLength。(后续push操作会用到)
template<class T>
void changeLengthID(T*& array, int oldLength, int newLength)
{
//函数首先分配一个新的、长度为newLength的数组
T* newarray = new T[newLength];
//取min {oldLength, newLength}
int number = (oldLength < newLength) ? oldLength : newLength;
for (int i = 0; i < number; i++)
//然后把原数组的前min {oldLength, newLength} 个元素复制到新数组中
newarray[i] = array[i];
//释放原数组所占用的空间
delete[] array;
//将新数组赋值到旧数组完成更改
array = newarray;
}
小根堆的插入
新增元素首先插入在堆的末尾元素,然后依据小根堆的性质,自底向上,递归调整。 这里以小根堆为例,大根堆同理;设大根堆的元素个数是n
思路总结
将新元素插入到编号为n+1的位置
从n+1号位置开始,沿着从该位置到根的路径,判断新元素能否放在该位置(当前判断位置)
能,新元素放入,结束
不能,将父节点上的元素下移到该位置,当前判断位置上移到父节点,继续判断
template<class T>
void minHeap<T>::push(const T& theElement)
{//把元素theElement加入堆
//必要时增加数组长度
if (heapSize == arrayLength - 1)
{//数组长度加倍
changeLengthID(heap, arrayLength, 2 * arrayLength);
arrayLength *= 2;
}
//为元素theElement寻找插入位置
//小根堆要求老叶子比新叶子小
int currentNode = ++heapSize;//currentNode从新叶子向上移动,就从最底下开始
while (currentNode != 1 && heap[currentNode / 2] > theElement)
{//这个时候老叶子比新叶子大,不能把元素放在这
//把大的那个元素赋给currentNode,相当于把大的元素往下移
heap[currentNode] = heap[currentNode / 2];
//同时把currentNode(一个打算插入theElement的位置)移向双亲,就往上移
currentNode /= 2;
}
//循环结束,即找到合适的位置插入
heap[currentNode] = theElement;
}
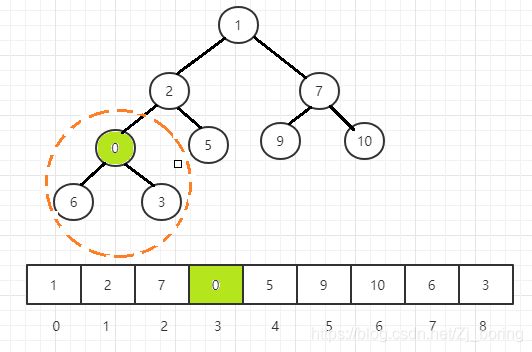
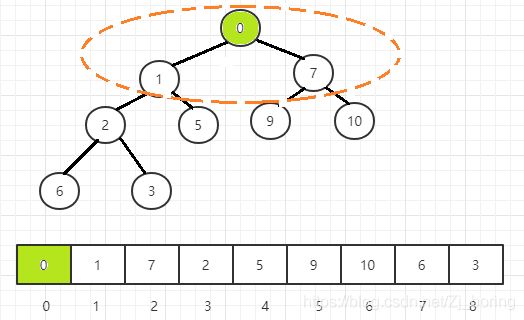
图解——以上面构建的小根堆为例,新插入元素0。
首先在堆的末尾插入新增元素
自底向上,递归调整其父节点


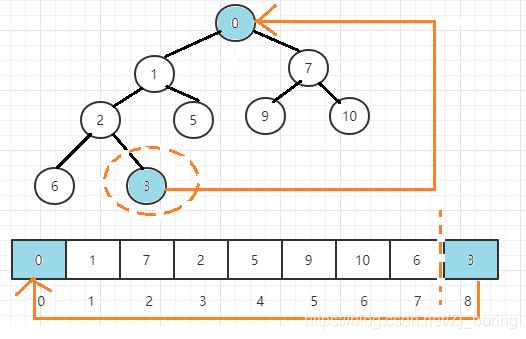
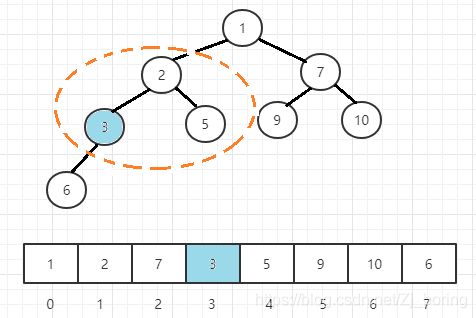
小根堆的删除
对于最大堆和最小堆,删除操作是针对堆顶元素而言的,即把末尾元素移动到堆顶,再自定向下(重复构建堆的操作),递归调整。
思路总结
删除堆顶元素,并把末尾元素移动到堆顶
从根开始,沿着从根到叶子节点的路径,为移到堆顶的末尾元素寻找合适的位置
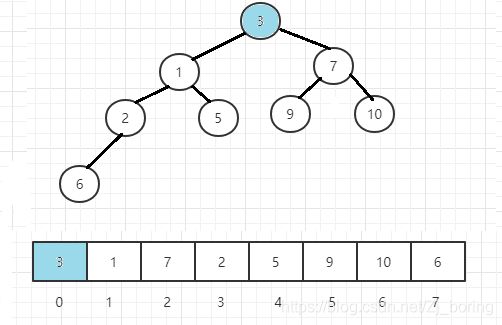
判断可以把lastElement放入当前位置吗?
可以,lastElement放入,结束
不可以,将当前位置的大孩子上移一层,当前位置下移一层,继续判断
template<class T>
void minHeap<T>::pop()
{
//删除堆顶元素
heap[1].~T();
//删除最后一个元素,然后重新建堆(这一步相当于把末尾元素拿出来)
T lastElement = heap[heapSize--];
//开始给拿出来的末尾元素找合适的放入位置,从顶开始,自顶向下调整
int currentNode = 1,
child = 2;//currentNode的孩子
while (child <= heapSize)
{
//heap[child]应该是currentNode的更大的孩子(就是说它的值太大了,应该往后头放)
if (child < heapSize && heap[child] > heap[child + 1])
child++;
//可以把lastElement放在heap[currentNode]吗?
//可以
if (lastElement <= heap[child])
break;
//不可以(以下操作和上述push相关操作同理)
heap[currentNode] = heap[child];//把孩子child向上移动
currentNode = child;//向下移动一层寻找位置
child *= 2;
}
heap[currentNode] = lastElement;
}
图解

小根堆的初始化
从最右一个有孩子的节点开始调整(
root = heapSize / 2,heapSize是最底下,/2相当于往上一层),根据小根堆的性质,越小的数据往上移动
template<class T>
void minHeap<T>::initialize(T* theHeap, int theSize)
{//在数组theHeap[1:theSize]中建小根堆
delete[] heap;
heap = theHeap;
heapSize = theSize;
//堆化
for (int root = heapSize / 2; root >= 1; root--)
{
T rootElement = heap[root];
int child = 2 * root;
while (child <= heapSize)
{
//heap[child]应该是兄弟中的较小者
if (child < heapSize && heap[child] > heap[child + 1])
child++;
//可以把rootElement放在heap[child / 2]吗?
//可以
if (rootElement <= heap[child])
break;
//不可以
heap[child / 2] = heap[child];
child *= 2;
}
heap[child / 2] = rootElement;
}
}
初始化这一部分原理和删除的依次比较流程一样,区别就是
删除是从上往下调整,从
currentNode = 1, child = 2开始而建堆是从
root = heapSize / 2,child = 2 * root开始,凭root--循环向上调整的
大根堆同理,以下是大根堆初始化的流程示例
12.5 左高树
定义
-
堆结构是一种隐式数据结构,时间效率和空间利用率都很高。
-
左高树是一种适合于实现优先队列的链表结构,可用于合并两个优先队列或多个长度不同的队列
扩充二叉树
-
外部节点——代替树中的空子树的节点
-
内部节点——具有非空子树的节点
-
扩充二叉树——增加了外部节点的二叉树

高度优先左高树(HBLT)
对补充二叉树中的任意节点x,令
s(x)为从节点x到它子树的外部节点的所有路径中,最短的一条路径长度根据
s(x)的定义可知:
若
x是外部节点,则s(x) = 0否则,
s(x) = min{s(L),s(R)} + 1,其中L和R分别为x的左右孩子。
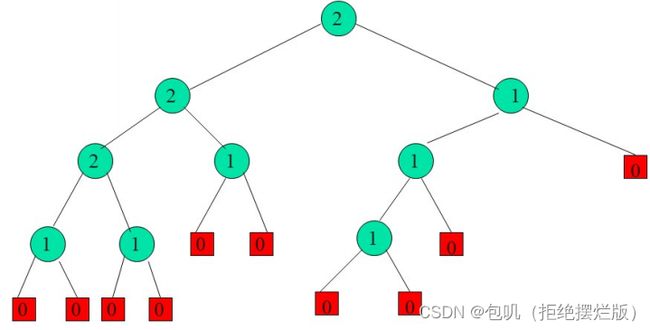
-
当且仅当一棵二叉树的任何一个内部节点,其左孩子的s值大于等于右孩子的s值时,该二叉树称为高度优先左高树。
-
定理:令x为HBLT的一个内部节点,则有:
- 以
x为根的子树的节点数目至少为 2 s ( x ) − 1 2^{s(x)}-1 2s(x)−1 - 若以
x为根的子树有m个内部节点,那么s(x)最多为 l o g 2 ( m + 1 ) log_2(m+1) log2(m+1) - 从
x到一外部节点的最右路径(即从x开始沿右孩子移动的路径)的长度为s(x)
- 以
-
最大(小)HBLT:该二叉树为高度优先左高树同时又是最大(小)树
重量优先左高树(WBLT)
定义x的重量
w(x),为以x为根的子树的内部节点数目
- 若x是外部节点,则
w(x) = 0- 若x为内部节点,其重量为
其孩子节点的重量之和加1
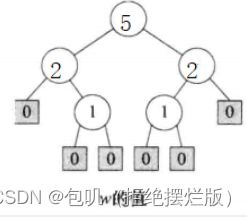
- 当且仅当其任何一个内部节点的左孩子的w值大于或等于右孩子的w值,称为重量优先左高树。
- 最大(小)WBIT:该二叉树为重量优先左高树同时又是最大(小)树
操作
以下都以最大HBLT为例,其他同理
类maxHblt
template<typename T>
class maxHblt : public maxPriorityQueue<T>,
public linkedBinaryTree<pair<int,T>>
{
public:
//当队列为空返回true;否则返回false
bool empty()const;
//返回队列的元素个数
int size()const;
//返回优先级最大的元素的引用
const T& top();
//删除队首元素
void pop();
//插入元素theElement
void push(const T& theElement);
//清空树
void erase();
//初始化一个HBLT
void initialize(T* theElement, int theSize);
//将本棵HBLT与参数所指的HBLT进行合并,内部调用私有方法meld
void meld(maxHblt<T>& theHblt);
private:
void clearTree(binaryTreeNode<pair<int, T>>* t);
void meld(binaryTreeNode<pair<int,T>>* &x,
binaryTreeNode<pair<int,T>>*& y);
private:
binaryTreeNode<pair<int,T>>* root; //根节点
int treeSize;//树的大小
};
pair:
- first:节点的s值
- second:优先级队列元素
最大HBLT的插入
最大HBLT的插入操作可利用最大HBLT的合并操作来实现
- 假设元素x要插入名为H的最大HBLT中
- 先建立一棵新的只包含x元素的HBLT
- 然后将这棵新的HBLT与名为H的HBLT进行合并
- 合并之后的HBLT就为插入之后最终的HBLT

template<typename T>
void maxHblt<T>::push(const T& theElement)
{
//创建一个新节点
binaryTreeNode<pair<int, T>> *q =
new binaryTreeNode<pair<int, T>>(pair<int,T>(1, theElement));
//将新节点与本HBLT进行合并
this->meld(this->root,q);
this->treeSize++;
}
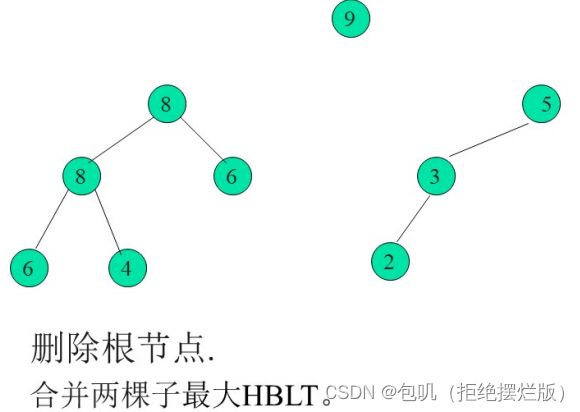
最大HBLT的删除
最大HBLT与大根堆一样,最大元素在根中,因此删除操作也是删除根节点
删除操作也是利用最大HBLT的合并操作来实现
- 若根被删除,则分别以根节点的左右孩子节点为根的子树是两棵最大HBLT
- 然后将这棵最大HBLT合并,之后便是删除后的结果
template<typename T>
void maxHblt<T>::pop()
{
//如果HBLT为空,不能出队列
if (this->treeSize == 0)
throw queueEmpty();
//得到根节点的左右子节点
binaryTreeNode<pair<int, T>>* left = this->root->leftChild,
*right=this->root->rightChild;
//删除根节点,将左子节点变为新根节点,然后进行合并
delete this->root;
this->root = left;
meld(this->root, right);
this->treeSize--;
}
两棵HBLT的合并
A、B:需要合并的两棵最大HBLT。
如果一者为空,则另一个便是合并的结果;
如果两者均不为空,则进行以下步骤
- 先比较两个HBLT的根,较大者的根作为合并后的HBLT的根
- 假设
A的根大于B,且A的左子树为AL- 然后将
A的右子树AR与B合并,然后形成一棵名为C的HBLT(如果A没有右子树,那B就什么都不做)- 然后将C与A合并
- 结果为:以
A的根为根,AL与C为左右子树的最大HBLT- 如果
AL的s值小于C的s值,则以C为左子树,AL为右子树;否则,AL为左子树,C为右子树合并的策略需要使用
递归来实现演示案例


//合并两棵根分别为*x和*y的左高树
template<typename T>
void maxHblt<T>::meld(binaryTreeNode<pair<int, T>>* &x,
binaryTreeNode<pair<int, T>>* &y)
{
//如果y为空,不进行合并
if (y == NULL)
return;
//如果x为空,那么就将y赋值给x
if (x == NULL)
{
x = y;
return;
}
//x和y均不为空
//如果x的值小于y的值,进行交换
if (x->element.second < y->element.second)
swap(x, y);
//将x的右子节点与y合并。如果x没有右子节点,那么就将y设置为x的右子节点
meld(x->rightChild, y);
//如果x的左子节点为空,将右子节点设置为左子节点
if (x->leftChild == NULL)
{
x->leftChild = x->rightChild;
x->rightChild = NULL;
//因为把右子节点赋值给左子节点了,所以右子节点为空,那么本节点的s值就为1
x->element.first = 1;
}
//如果左子节点不为空,比较是否需要交换
else
{
//如果左子节点的s值比右子节点的小,那么就进行交换
if (x->leftChild->element.first < x->rightChild->element.first)
{
swap(x->leftChild, x->rightChild);
}
//因为右子节点到外部节点之间的s值是最小的,所以就将x的s值设置为右子节点的s值+1
x->element.first = x->rightChild->element.first + 1;
}
}
最大HBLT的初始化
初始化过程是将n个元素逐个插入最初为空的最大HBLT
创建n个仅包含一个元素的最大HBLT,将这n棵树组成一个FIFO队列
从队列中依次删除两个最大HBLT,将其合并,再插入队列末尾
重复第2步直到队列只有一棵HBLT
演示案例:元素 7,1,9,11,2

template<typename T>
void maxHblt<T>::initialize(T* theElement, int theSize)
{
//创建一个队列,用来初始化HBLT
queue<binaryTreeNode<pair<int, T>>*> q;
//清空当前HBLT
erase();
//先建立一组HBLT,每个HBLT中只有一个节点
for (int i = 1; i <=theSize; ++i)
q.push(new binaryTreeNode<pair<int, T>>(pair<int, T>(1,theElement[i])));
//theSize个HBLT,需要合并theSize-1次
for (int i = 1; i <= theSize - 1; ++i)
{
//从队列中取出两个HBLT进行合并
binaryTreeNode<pair<int, T>>* b = q.front();
q.pop();
binaryTreeNode<pair<int, T>>* c = q.front();
q.pop();
//合并
meld(b, c);
//合并之后再次放入到队列中
q.push(b);
}
if (theSize > 0)
this->root = q.front();
this->treeSize = theSize;
}
补充erase、clearTree函数
template<typename T>
void maxHblt<T>::erase()
{
//调用clearTree
clearTree(this->root);
this->root = NULL;
this->treeSize = 0;
}
template<typename T>
void maxHblt<T>::clearTree(binaryTreeNode<pair<int, T>>* t)
{
//后序遍历删除
if (t)
{
clearTree(t->leftChild);
clearTree(t->rightChild);
delete t;
}
}
12.6 应用
12.6.1 堆排序
- 将要排序的n个元素初始化为一个大(小)根堆
- 每次从堆中提取(即删除)元素。
- 如果使用大根堆,各元素将按递增次序提取。
- 如果使用小根堆,各元素将按递减次序提取。
流程示例
12.6.3 霍夫曼编码
霍夫曼原理理解视频
霍夫曼编码使用补充二叉树进行编码,详见实验10.2
构建霍夫曼树
- 初始化二叉树集合,每个二叉树含一个外部节点,每个外部节点代表字符串中一个不同的字符
- 从集合中选择两棵具有最小权值的二叉树,并把它们合并成一棵新的二叉树。
- 合并方法是把这两棵二叉树分别作为左右子树
- 然后增加一个新的根节点,新二叉树的权值为两棵子树权值之和。
- 重复第2步,直到仅剩下一棵树为止。
