YOLOv5改进——加入解耦合头
YOLOv5s+解耦合头(Decoupled Head)
最近,在看YOLOv5s的网络结构,看了一段时间感觉还可以,就想着在看看能不能改进一下。现在网上对于YOLOv5的改进可谓是应有尽有,在这里,写一下关于自己加入解耦合头的改进。实验之后,发现map值提升了1.8(基于我自己的数据集),还是不错的
文章目录
- YOLOv5s+解耦合头(Decoupled Head)
-
- 第一步
- 第二步
- 第三步
- 第四步
- 总结
- 参考
第一步
在common.py文件下,加入以下代码,直接复制即可!
#加入解耦头!!!!!!!!!!!!!!!!!
class DecoupledHead(nn.Module):
def __init__(self, ch=256, nc=80, anchors=()):
super().__init__()
self.nc = nc # number of classes
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.merge = Conv(ch, 256 , 1, 1)
self.cls_convs1 = Conv(256 , 256 , 3, 1, 1)
self.cls_convs2 = Conv(256 , 256 , 3, 1, 1)
self.reg_convs1 = Conv(256 , 256 , 3, 1, 1)
self.reg_convs2 = Conv(256 , 256 , 3, 1, 1)
self.cls_preds = nn.Conv2d(256 , self.nc * self.na, 1)
self.reg_preds = nn.Conv2d(256 , 4 * self.na, 1)
self.obj_preds = nn.Conv2d(256 , 1 * self.na, 1)
def forward(self, x):
x = self.merge(x)
x1 = self.cls_convs1(x)
x1 = self.cls_convs2(x1)
x1 = self.cls_preds(x1)
x2 = self.reg_convs1(x)
x2 = self.reg_convs2(x2)
x21 = self.reg_preds(x2)
x22 = self.obj_preds(x2)
out = torch.cat([x21, x22, x1], 1)
return out
第二步
在yolo.py文件下,加入以下代码,直接复制即可!
#加入解耦头!!!!!!!!!!!!!!!!!!!!
class Decoupled_Detect(nn.Module):
stride = None # strides computed during build
onnx_dynamic = False # ONNX export parameter
export = False # export mode
def __init__(self, nc=6, anchors=(), ch=(), inplace=True): # detection layer
super().__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
self.anchor_grid = [torch.zeros(1)] * self.nl # init anchor grid
self.register_buffer('anchors', torch.tensor(anchors).float().view(self.nl, -1, 2)) # shape(nl,na,2)
self.m = nn.ModuleList(DecoupledHead(x, nc, anchors) for x in ch)
self.inplace = inplace # use in-place ops (e.g. slice assignment)
def forward(self, x):
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.onnx_dynamic or self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i], self.anchor_grid[i] = self._make_grid(nx, ny, i)
y = x[i].sigmoid()
if self.inplace:
y[..., 0:2] = (y[..., 0:2] * 2 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
else: # for YOLOv5 on AWS Inferentia https://github.com/ultralytics/yolov5/pull/2953
xy, wh, conf = y.split((2, 2, self.nc + 1), 4) # y.tensor_split((2, 4, 5), 4) # torch 1.8.0
xy = (xy * 2 + self.grid[i]) * self.stride[i] # xy
wh = (wh * 2) ** 2 * self.anchor_grid[i] # wh
y = torch.cat((xy, wh, conf), 4)
z.append(y.view(bs, -1, self.no))
return x if self.training else (torch.cat(z, 1),) if self.export else (torch.cat(z, 1), x)
def _make_grid(self, nx=20, ny=20, i=0, torch_1_10=check_version(torch.__version__, '1.10.0')):
d = self.anchors[i].device
t = self.anchors[i].dtype
shape = 1, self.na, ny, nx, 2 # grid shape
y, x = torch.arange(ny, device=d, dtype=t), torch.arange(nx, device=d, dtype=t)
yv, xv = torch.meshgrid(y, x, indexing='ij') if torch_1_10 else torch.meshgrid(y, x) # torch>=0.7 compatibility
grid = torch.stack((xv, yv), 2).expand(shape) - 0.5 # add grid offset, i.e. y = 2.0 * x - 0.5
anchor_grid = (self.anchors[i] * self.stride[i]).view((1, self.na, 1, 1, 2)).expand(shape)
return grid, anchor_grid
第三步
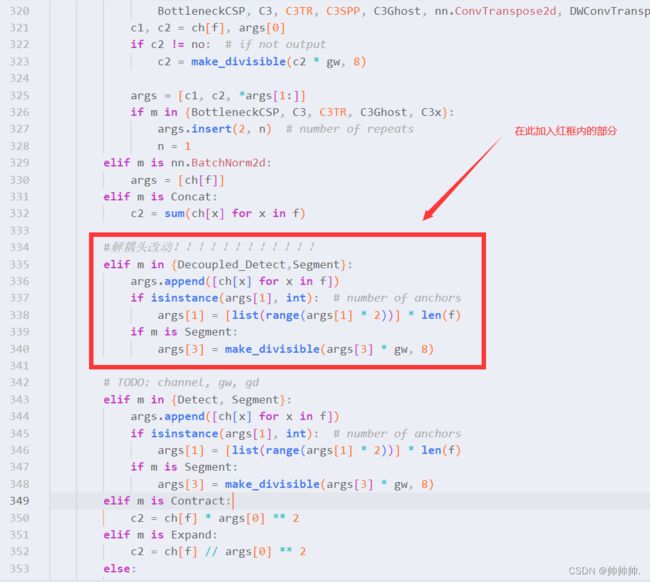
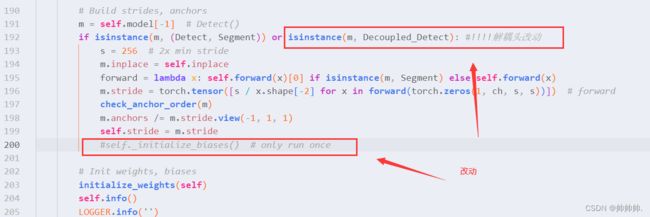
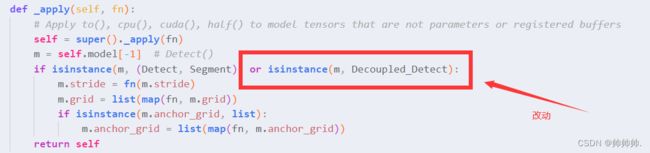
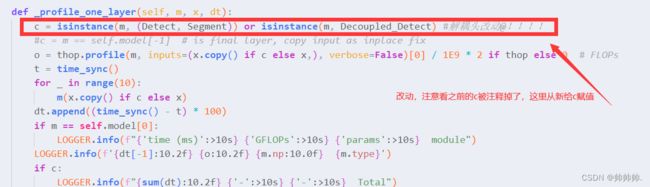
在yolo.py文件下,找到parse_model函数,在下图地方加入改动部分,以及其他一些小改动。
第四步
在yolov5s.yaml(我自己的是yolov5s,你们根据自己的模型进行更换yaml文件)文件中,进行最后一步改动,在head中把Detect改为Decoupled_Detect,其他不变。

总结
至此,关于yolov5加入解耦合头的改进完成,总的来说 提升性能还是不错的,就是会增大参数量
参考
参考了以下文章:
YOLOv5 Head解耦