P8-YOLOv5-C3模块实现
● 本文为365天深度学习训练营 中的学习记录博客
● 参考文章:Pytorch实战 | 第P8天:YOLOv5-C3模块实现(训练营内部成员可读)
● 原作者:K同学啊 | 接辅导、项目定制
搭建包含C3模块的模型
C3 作用
1 在新版yolov5中,作者将BottleneckCSP(瓶颈层)模块转变为了C3模块,其结构作用基本相同均为CSP架构,只是在修正单元的选择上有所不同,其包含了3个标准卷积层以及多个Bottleneck模块(数量由配置文件.yaml的n和depth_multiple参数乘积决定)
2 C3相对于BottleneckCSP模块不同的是,经历过残差输出后的Conv模块被去掉了,concat后的标准卷积模块中的激活函数也由LeakyRelu变为了SiLU(同上)。
3 该模块是对残差特征进行学习的主要模块,其结构分为两支,一支使用了上述指定多个Bottleneck堆叠和3个标准卷积层,另一支仅经过一个基本卷积模块,最后将两支进行concat操作。
结构模块
Conv2d
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode='zeros', device=None, dtype=None)参数说明
in_channels:网络输入的通道数。
out_channels:网络输出的通道数。
kernel_size:卷积核的大小,如果该参数是一个整数q,那么卷积核的大小是qXq。
stride:步长。是卷积过程中移动的步长。默认情况下是1。一般卷积核在输入图像上的移动是自左至右,自上至下。如果参数是一个整数那么就默认在水平和垂直方向都是该整数。如果参数是stride=(2, 1),2代表着高(h)进行步长为2,1代表着宽(w)进行步长为1。
padding:填充,默认是0填充。
dilation:扩张。一般情况下,卷积核与输入图像对应的位置之间的计算是相同尺寸的,也就是说卷积核的大小是3X3,那么它在输入图像上每次作用的区域是3X3,这种情况下dilation=0。当dilation=1时,表示的是下图这种情况。
groups:分组。指的是对输入通道进行分组,如果groups=1,那么输入就一组,输出也为一组。如果groups=2,那么就将输入分为两组,那么相应的输出也是两组。另外需要注意的是in_channels和out_channels必须能整除groups。
bias:偏置参数,该参数是一个bool类型的,当bias=True时,表示在后向反馈中学习到的参数b被应用。
padding_mode:填充模式, padding_mode=‘zeros’表示的是0填充。
SILU 激活函数
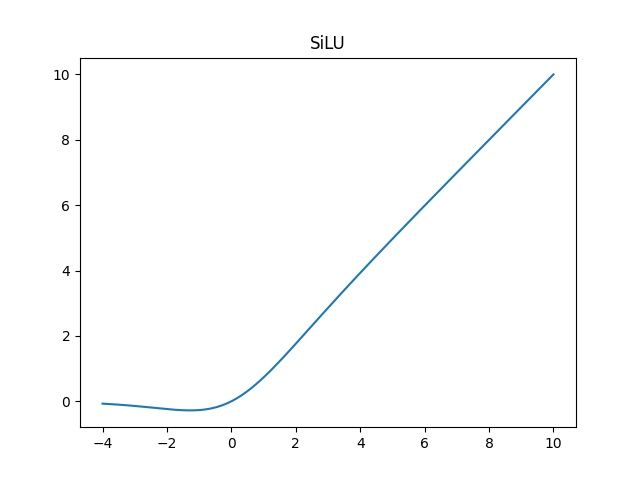
优点:ReLU有无上界和有下界的特点,而Swish相比ReLU又增加了平滑和非单调的特点,这使得其在ImageNet上的效果更好。
缺点:引入了指数函数,增加了计算量.
SiLU是Sigmoid和ReLU的改进版。SiLU具备无上界有下界、平滑、非单调的特性。SiLU在深层模型上的效果优于 ReLU。可以看做是平滑的ReLU激活函数。
autopad函数
当不指定 p 时,Conv2d 的 pad 值是让 k//2 (除法向下取整) 计算得到的 (aotopad函数) 。
有以下两种情况:
当s=1时候,显然经过 Conv2d 后特征的大小不变;
当s=2时候,那么经过 Conv2d 后特征的大小减半;

C3模块结构图

搭建模型
import torch.nn.functional as F
def autopad(k, p=None): # kernel, padding
# Pad to 'same'
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
# Standard convolution
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
def forward(self, x):
return self.act(self.bn(self.conv(x)))
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))
class model_K(nn.Module):
def __init__(self):
super(model_K, self).__init__()
# 卷积模块
self.Conv = Conv(3, 32, 3, 2)
# C3模块1
self.C3_1 = C3(32, 64, 3, 2)
# 全连接网络层,用于分类
self.classifier = nn.Sequential(
nn.Linear(in_features=802816, out_features=100),
nn.ReLU(),
nn.Linear(in_features=100, out_features=4)
)
def forward(self, x):
x = self.Conv(x)
x = self.C3_1(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
device = "cuda" if torch.cuda.is_available() else "cpu"
print("Using {} device".format(device))
model = model_K().to(device)
model打印模型
model_K(
(Conv): Conv(
(conv): Conv2d(3, 32, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(C3_1): C3(
(cv1): Conv(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(cv2): Conv(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(cv3): Conv(
(conv): Conv2d(64, 64, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(m): Sequential(
(0): Bottleneck(
(cv1): Conv(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(cv2): Conv(
(conv): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
)
(1): Bottleneck(
(cv1): Conv(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(cv2): Conv(
(conv): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
)
(2): Bottleneck(
(cv1): Conv(
(conv): Conv2d(32, 32, kernel_size=(1, 1), stride=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
(cv2): Conv(
(conv): Conv2d(32, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(act): SiLU()
)
)
)
)
(classifier): Sequential(
(0): Linear(in_features=802816, out_features=100, bias=True)
(1): ReLU()
(2): Linear(in_features=100, out_features=4, bias=True)
)
)训练数据集参考P3周天气识别
