2023国赛数学建模A题第二问解题思路 - 定日镜场的优化设计(详细过程,小白读完就会)
2.1.镜场公式
2.1.1基础布局
在塔式太阳能热发电领域,由 Laurence等人提出的辐射网格布局是一种应用较广泛的排布方式。此布局方式是将定日镜沿等方位线交替放置在各恒定半径处,且随着径向距离的增加,镜场排布也呈现出由密到疏的趋势。为定量表示定日镜与吸热塔的位置关系,还引入了径向间距ΔR和方位间距ΔA这 2个参数:
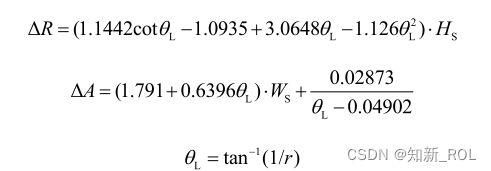
式中,HS为定日镜高度;WS为定日镜宽度;L为集热器相对于定日镜的高度角;r为以目标点高度(即集热器孔口中心点到定日镜镜面中心点的垂直距离)为单位距离时定日镜到吸热塔的水平距离
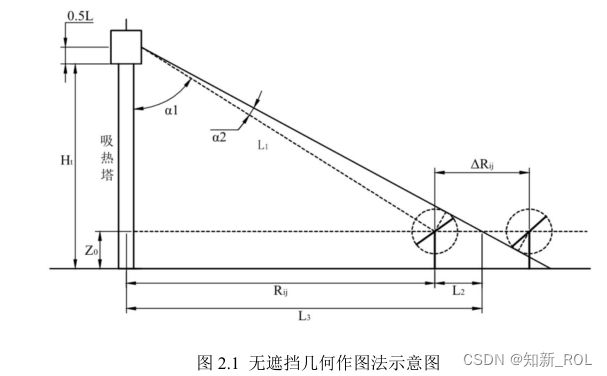
基于辐射网格排布思想,结合以规避同一径向方向上相邻定日镜的遮挡损失为目标的几何作图设计方法,后期又相继衍生出了 EB、No blocking-dense、DELSOL 3种定日镜场布局,其主要区别在于近塔区域的径向间距与方位间距布置规则不同。无遮挡径向间距计算公式如下

式中,Ht为吸热塔光学高度;L为吸热器高度;L1为吸热器中心点到前排定日镜镜面中心点连线的长度;L2为后排定日镜反射光线刚好不被前排定日镜遮挡时光线在前后2个定日镜边缘点处连线的中心点距前排定日镜镜面中心点的水平距离;L3为前排定日镜镜面中心点距吸热塔的水平距离;1为吸热器中心点到前排定日镜镜面中心点连线与吸热塔竖直轴线的夹角;2为吸热器中心点到前排定日镜镜面中心点连线与后排定日镜反射光线刚好不被前排定日镜遮挡时后排定日镜边缘点反射光线到吸热器中心点连线间的夹角;Z0为定日镜中心距水平地面高度;R0为定日镜圆环半径;Ri,j为镜场第 i个区域中第 j个镜环的半径;为后方定日镜反射光线刚好不被前排定日镜遮挡时反射光线与吸热塔轴线夹角。无遮挡几何作图法示意图,如图 2.1所示。
3种布局均规定属于同一区域的定日镜方位角需保持一致,故同区域各镜环所容纳的定日镜数量相同且同镜环上定日镜之间的方位间距相等,而伴随着镜环半径的增大,各镜环方位间距也逐渐增大。此时会通过方位间距重置极限因子 Arlim来对每个区域的镜场范围进行限制,以提高土地利用率,否则镜环方位间距会持续增大,导致镜场排布越来越稀疏。
2.1.2 DELSOL布局
DELSOL布局,如图 2.2所示。
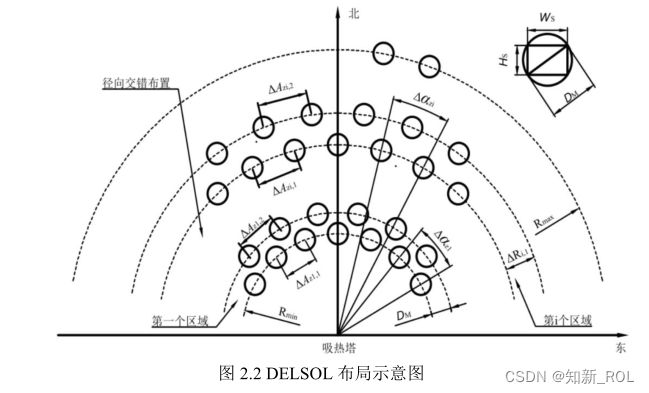
在 DELSOL中,当镜场某区域末环与首环定日镜方位间距之比大于 Arlim时,会开始布置下一镜场区域。布置镜场新区域的条件为:
![]()
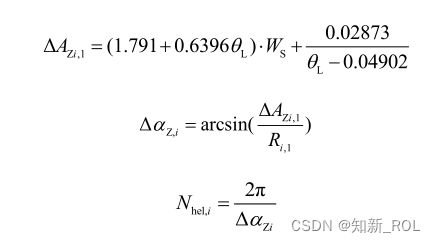
式中,AZi,1为镜场第 i个区域首环中定日镜的方位间距;AZi,k为镜场第 i个区域末环中定日镜的方位间距。定日镜特征长度 DM、各区域首环定日镜方位间距 AZi,1、各区域方位 AZ,i、各镜环定日镜数量 Nhel,i计算公式分别如下:
从第 1个区域开始,规定镜场的径向间距满足ΔR=DM。随着镜环半径的增大,当ΔRi,j=DM不满足无遮挡的条件时,第 i个区域的 j+1环开始出现遮挡损失,从该环开始需要增大 R ,此时根据几何作图法重新确定径向间距,见式(2.4)—(2.8)。
2.1.3 EB布局
EB布局,如图 2.3所示
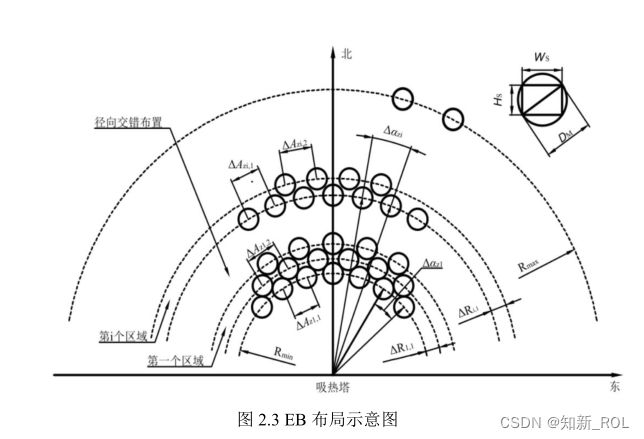
镜场中各区域首环定日镜方位间距计算公式为:

式中,Asf为方位间距因子,其取值主要与塔高有关,通常取值为 2。各区域内除首环外,其余环定日镜方位间距通过该区域定日镜方位角得出,计算公式为:
式中,AZi,j为镜场第 i区域第 j环定日镜的方位间距。第 i个镜场区域中定日镜方位角计算公式为:
![]()
各镜环定日镜数量计算公式见式(2.13)。
相邻镜场区域交界处定日镜径向间距恒定设置为RDM。R1,1为镜场第 1个区域
首环与第 2环之间的径向间距,计算公式为:
同一区域相邻环的定日镜径向间距始终设置为R1,1。当镜场半径增大到某一值后,对应环定日镜开始出现遮挡损失,此后以几何作图法重新确定径向间距,见式。
2.1.4 No blocking-dense布局
No blocking-dense布局,如图 2.4所示。

该布局由 Campo布局[23]与 EB布局方式结合而成。因近塔区各类光学效率损失更小,故采用 Campo布局在镜场中心区域生成密集型镜场,即要求镜环上定日镜的等价圆相切排布,相邻镜环的定日镜也相切,尽可能减小彼此间的径向间距,即方位间距ADM,同时规定径向间距RDM。但随着镜场半径的增大,若继续按照 Campo布局布置,因定日镜之间的方位角和径向间距很小,此时会造成大范围的阴影遮挡损失,故此后改用EB布局
2.2镜场建模与分析
2.2.1镜场建模
1)镜场光学效率
由于镜场中的定日镜数量通常为几千到几万面不等,若模拟分析全年每天的镜场效率,计算量十分巨大,故选择对典型日(春分日、夏至日、秋分日、冬至日)进行离散时间采样,计算相应时间点的光学效率进而得出年均光学效率[2]。结合镜场开场角为 15°[23],利用太阳位置算法[24](solar position algorithm,SPA)计算出典型日中太阳高度角大于 15°的时间区域,以半小时为间隔依次模拟镜场的光学效率及接收能量。
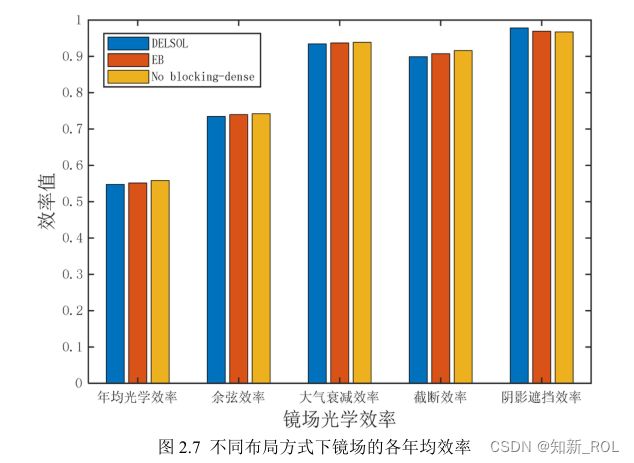
镜场光学效率主要由余弦效率、大气衰减效率、阴影遮挡效率和截断效率组成[4],不同布局方式下镜场的各年均效率如图 2.7所示。可以看出,No blocking-dense布局的定日镜场整体年均光学效率可高达 56.40%,EB布局的年均效率略低,为 55.10%,DELSOL布局最低,为 53.90%。造成这一现象的主要原因是:前 2种镜场排布方式更为紧密,同时在效率较高的近塔区 No blocking-dense布局可容纳更多的定日镜。从图2.7中还可以发现,无论采用何种布局方式,余弦效率值都是最低的,这是由于其大小主要取决于太阳位置以及镜场坐标,余弦损失是不可避免的。大气衰减效率、截断效率分别与定日镜距吸热塔的距离、定日镜跟踪精度有关,其值一般相对较高。阴影遮挡效率主要受镜场排布的影响,此 3种布局的基础是径向交错排布且都结合了无遮挡损失的思想,致使定日镜间的干扰较少,从而在很大程度上减小了遮挡损失,但阴影遮挡效率值无法达到 1,这是因为还存在阴影损失,此外,因布局规则会导致后续镜场区域的第1个镜环始终存在遮挡损失
2.2.2.土地利用率
传统的镜场土地利用率定义为定日镜面积与镜场面积的比值,其大小主要取决于镜场密度,它能够反映单位土地面积中所容纳定日镜的多少[25]。但考虑到定日镜在工作时并非固定状态,而是会发生方位和俯仰运动,并且在安装、检修时都需要一定的工作空间,为更精确地表达土地利用率,故重新定义其为定日镜工作面积与镜场面积的比值。其中,定日镜工作面积按其平行于地面时可能转动的最大范围的面积来计算,即以矩形定日镜对角线为直径所得圆的面积。定日镜工作面积 Arec、镜场面积 Aland、土地利用率计算公式[22]分别如下:
式中,Rmax为镜场最大镜环半径。
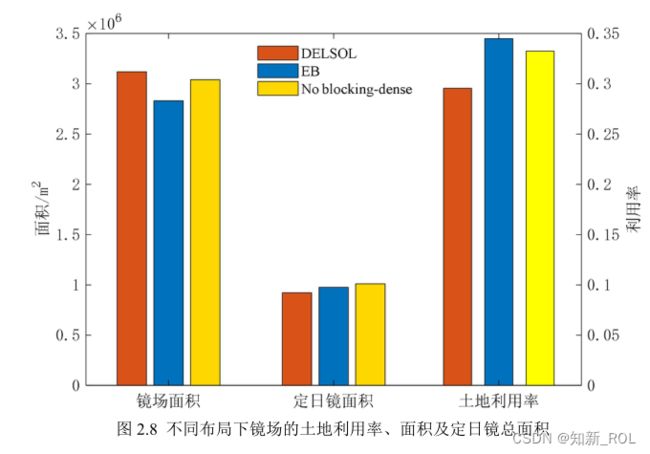
从镜场建模结果可以得到 3种布局模式下的定日镜数量,其中 DELSOL布局含 4585面定日镜,EB布局含 5027面定日镜,No blocking-dense布局含 4856面定日镜。不同布局下镜场的土地利用率、面积及定日镜总面积数据如图 2.8所示。可以看出,
No blocking-dense布局下镜场土地利用率最高,为 34.49%;EB布局次之,为 33.24%;DELSOL布局最低,为 29.56%。从 3种布局的径向和方位间距布置规则也不难发现,No blocking-dense布局相比于 EB布局在镜场近塔区更紧凑,而 DELSOL布局则更稀疏,这种布局方式也在一定程度上影响了镜场的土地利用率。同时因为 No blocking-dense布局密排区的定日镜数量由吸热塔高度决定,故在塔高一定的情况下,随着镜场规模的增大,该布局下镜场土地利用率会不断趋近于 EB布局。
 (3)镜场能量分析
(3)镜场能量分析
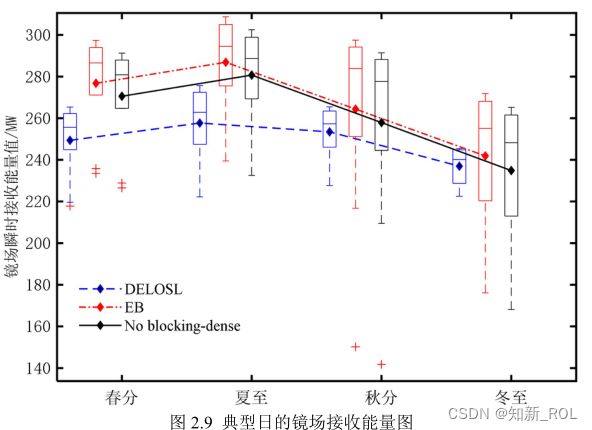
在已知镜场年均光学效率的基础上,选择典型日对镜场进行光学性能模拟,探究在限定镜场边界的条件下何种布局能够产生更多的能量。仿真的初始条件与镜场光学效率模拟相同。通过光学性能模拟,得到了典型日镜场吸热塔接收能量曲线,如图 2.9所示,可以看出,所有模式中 EB布局产生的能量最高,DELSOL最低,其原因在于 3种布局的光学效率差值不大,故当 EB布局与 No blocking-dense布局的定日镜数量差值较大时,EB镜场接收的能量更高
2.2.3阴影遮挡效率
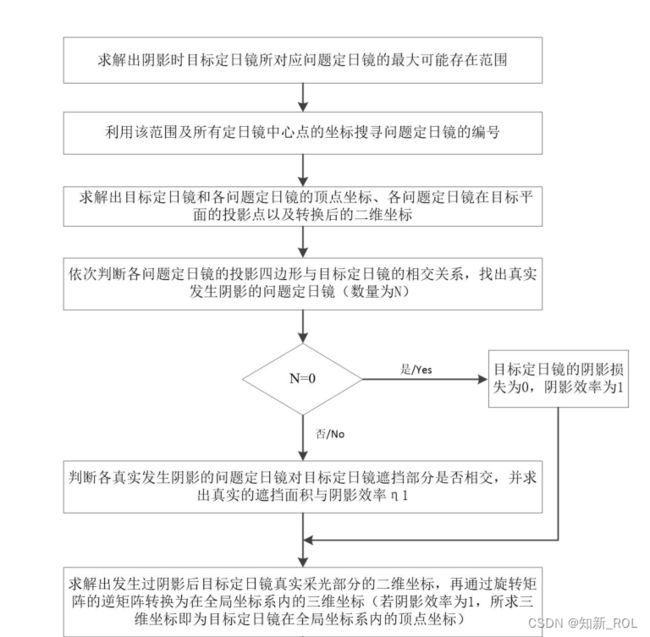
(1)确定问题定日镜存在范围
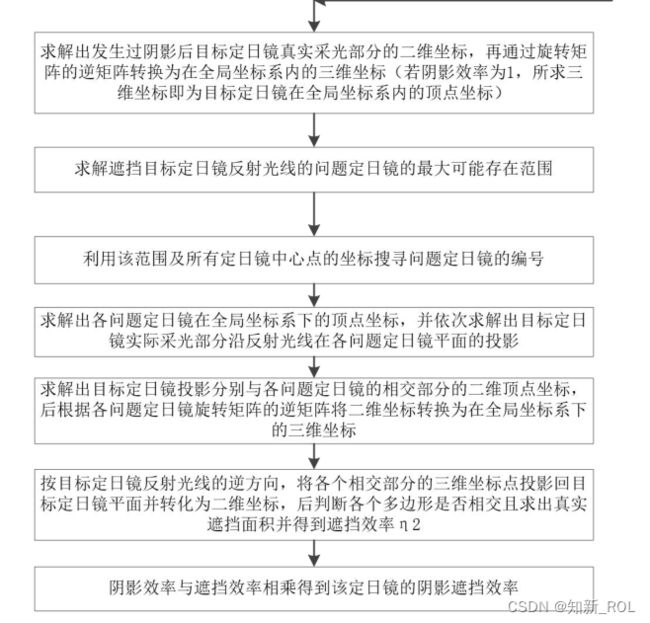
阴影遮挡效率实际上是定日镜阴影效率与遮挡效率的乘积,其中阴影损失是目标定日镜的入射光线被周围定日镜遮挡所造成的损失,遮挡损失是目标定日镜的反射光线被周围定日镜遮挡所造成的损失[32]。在求解阴影遮挡效率时,首先需确定出会对目标定日镜发生阴影损失和遮挡损失的问题定日镜的中心点在二维平面上可能存在的范围(称为目标范围)。此后,先在目标定日镜的阴影目标范围内搜索除目标定日镜外的其他定日镜(称为问题定日镜),并在已确定的问题定日镜中寻找对目标定日镜真实造成阴影损失的定日镜进行阴影效率求解;计算出经过阴影损失后定日镜实际采光部分的坐标点,并在遮挡目标范围内寻找真实造成遮挡损失的问题定日镜进行遮挡效率计算;将目标定日镜的阴影效率与遮挡效率相乘即为阴影遮挡效率。
求解发生阴影时问题定日镜所在区域需按最大范围进行求解,如图 3.6与 3.7所示。图中的等价圆表示定日镜转动时其顶点在 X-Y平面可能形成的最大运动轨迹(定日镜不发生俯仰运动只进行水平转动时可产生该运动轨迹,且定日镜的特征长度即为等价圆的直径),过目标定日镜等价圆按入射光线在 X-Y平面的反向分量作辅助线与问题定日镜相切,从问题定日镜圆心出发作与辅助线平行且相等的直线 L2,从而确定问题定日镜可能存在的范围 P1P2P3P4。
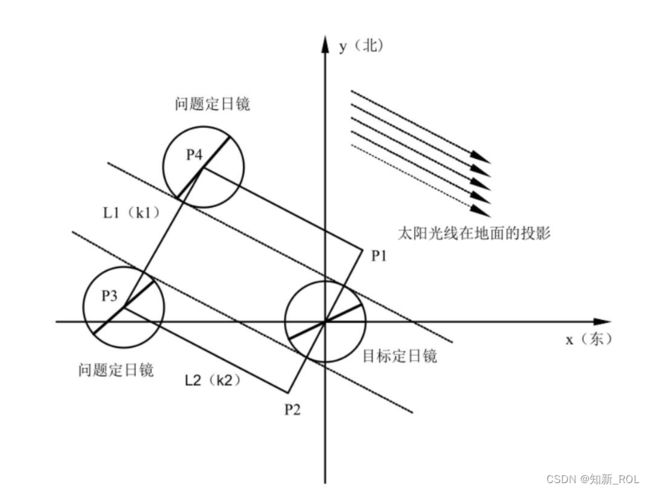
图 3.6阴影时问题定日镜所在区域

为便于计算,规定所有定日镜中心点的 z坐标均为 0,目标定日镜坐标为(x,y,0),发生阴影时问题定日镜所在区域计算公式为:
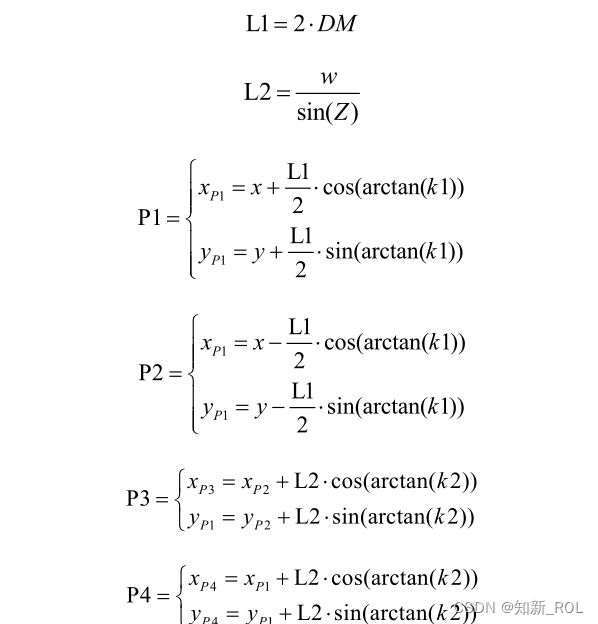
同理,可求解发生遮挡损失时问题定日镜的可能存在范围,即将入射光线改为反射光线后,按求解阴影时问题定日镜范围的思路进行求解即可
(2)平板投影法求解 S&B损失
在确定发生阴影或遮挡损失时问题定日镜的存在范围后,搜索该范围内的定日镜编号,并得到相应问题定日镜的顶点坐标,通过按入射或反射光线将问题定日镜投影至目标定日镜平面后与目标定日镜是否发生相交情况来判断该问题定日镜是否与目标定日镜真实发生了阴影或遮挡损失
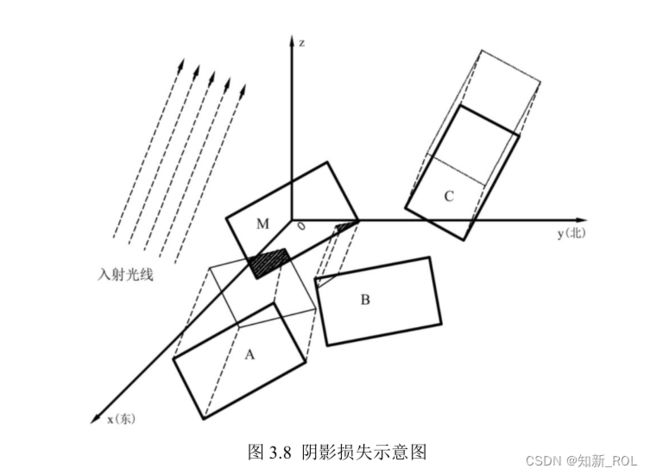
在入射过程中,原本应照向目标定日镜的入射光线被问题定日镜遮挡的示意图如图3.8所示。其中M为目标定日镜,在通过求解发生阴影时问题定日镜所在区域后,搜索到了 W1、W2、W3三面问题定日镜,W3未对 M定日镜的入射光线造成遮挡。在很多阴影遮挡效率计算中,通常采用几何投影法或蒙特卡罗光迹追踪法。在几何投影法计算中,因为此类效率损失主要由相邻定日镜引发,故在计算中通常认为问题定日镜与目标定日镜平行,但实际上定日镜规格较大,且彼此距离也较大,同时沿入射光线将问题定日镜投影至目标定日镜平面时,其投影面也并非一个矩形,而是一种不则的四边形,所以该方法误差较大;而在蒙特卡罗光迹追踪法中,将追踪光线设置的越密集,其结果也越精确,但反之计算量与计算时间也会随之增加[33]。因此,本文采用一种改进的几何投影法来计算阴影遮挡效率。具体计算过程如下:
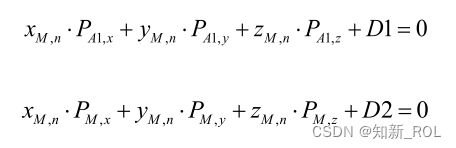
问题定日镜 A的镜面中心点为 OA (xA,yA,0)点,四个顶点依次为 PA1~ PA4,目标定日镜 M的中心点为 OM (xM,yM,0),四个顶点依次为 PM1~ PM4,首先应先将问题定日镜沿入射光线投影至目标定日镜平面,结合入射光线及三维平面公式,确定投影距离,从而确定投影点。过顶点 PA1作与镜面 M相平行的平面 A*,两个平面的三维表达式分别为:


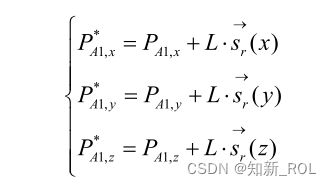
以 PA1点为例,原坐标点的 x,y,z值加上投影距离在三个坐标轴上的对应的分量值,即为其在问题平面上的投影点 *1,A xP ,而镜面 A上其他顶点的投影点坐标亦可按此方法求出,计算公式为:
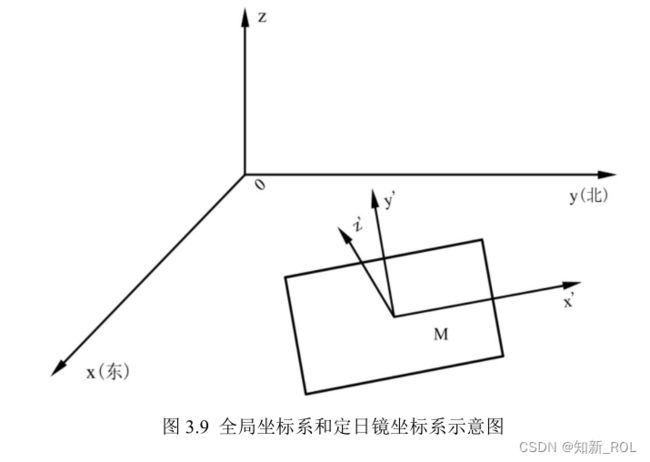
虽然投影后的镜面 A*与目标定日镜 M处于同一平面上,但它们的顶点坐标仍为三维坐标数据(如图 3.9所示),不利于对相交面积进行计算,故还需将投影镜面和问题镜面的坐标转入同一平面坐标系从而计算重叠部分的面积。可将顶点坐标从空间坐标系内转换至以目标定日镜镜面中心点为原点,镜面法向量方向为 z轴的新坐标系内,即转换后空间坐标系的 X-Y平面为目标定日镜平面,且转换后坐标点的 z坐标均为 0。
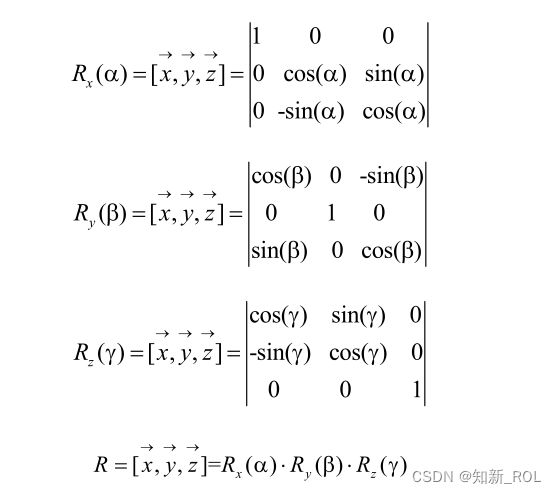
上述目的可通过对全局坐标系进行一定角度的旋转来实现。具体可采用坐标系的欧拉旋转变化计算,首先需找到全局坐标系中三个分量各自的旋转角度,规定依次绕 x轴、y轴、z轴进行旋转,旋转角度分别为 、 、 。坐标系绕 x轴旋转时,由 y轴正方向绕向 z轴正方向的角度;绕 y轴旋转时,由 z轴正方向绕向 x轴正方向的角度;绕 z轴旋转时,由 x轴正方向绕向 y轴正方向的角度。如图 3.10所示。
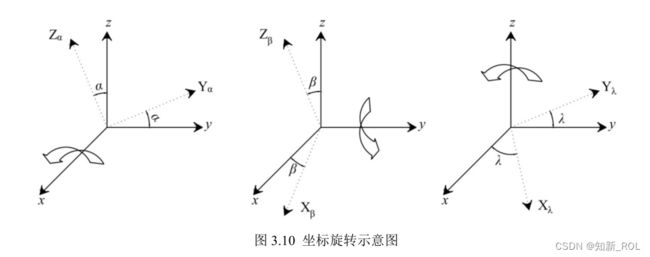
依次对应的旋转矩阵分别为:
此时旋转后的新坐标系其 x、y、z轴的方向与目标坐标系一致,但新坐标系仍以原始全局坐标系的原点为原点,而目标坐标系的原点实质上是目标定日镜镜面中心点,因此,可通过新坐标系下所得各投影点的新坐标与其所对应的目标定日镜镜面中心点相减,从而将三维问题转换为二维,即最终所得各点坐标的 z值均为 0。

经过坐标转换后,得出目标定日镜与问题定日镜投影在同一平面的二维示意图,如图 3.11所示。在实际情况中,当太阳高度角较低时容易发生多面定日镜对同一目标定日镜的入射光线造成遮挡,此时遮挡部分可能会发生重叠。因此,对于多面问题定日镜同时造成遮挡的情况我们还需进行详细计算。
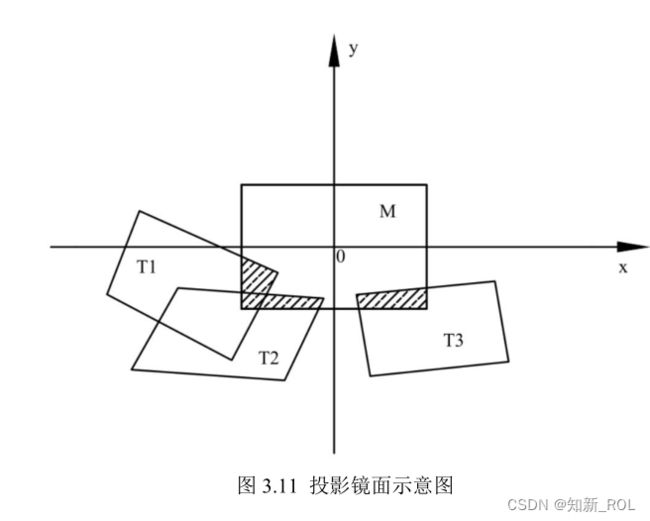
具体计算方法为,根据投影四边形确定其四条边的数学表达式,判断每条边与目标定日镜四条边的相交情况并求出交点,再确定出目标定日镜内问题定日镜的投影点和问题定日镜投影内目标定日镜的顶点,从而确定二者相交部分的顶点坐标。在依次求出各问题定日镜投影在目标定日镜上的遮挡部分的顶点坐标后,再按上述方式思路求解各遮挡部分彼此是否存在相交情况,并求出遮挡重叠后的多边形的顶点坐标,进而求出遮挡部分的面积从而确定阴影损失。遮挡损失亦可按上述方法求解
阴影遮挡效率的整体求解思路如下: