OpenCV自学笔记17. 基于SVM和神经网络的车牌识别(一)
基于SVM和神经网络的车牌识别(一)
本系列文章参考自《深入理解OpenCV实用计算机视觉项目解析》仅作学习用途
图像预处理
本篇用到的测试图片为:

Step1. 首先,读入并显示图像,代码如下:
string in = "images/2715DTZ.jpg";
Mat image = imread(in, IMREAD_GRAYSCALE); // IMREAD_GRAYSCALE的值就是0
if( image.empty() ){
return -1;
}
imshow("【原始图】", image);上述代码把原始图像转变为单通道的灰度图,程序运行的效果如下:

Step2. 读入图像后,需要对图像进行均值滤波去噪
blur(image, image, Size(5, 5));
imshow("【去噪后】", image);效果如下:

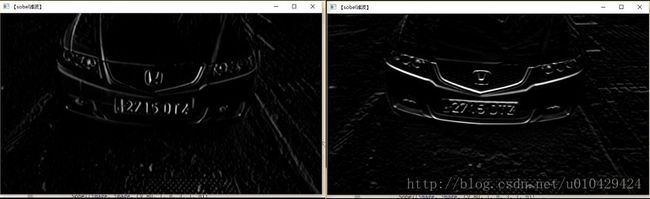
车牌的一个明显特征是,存在大量的竖直边,为了找出这些竖直边,采用Sobel滤波器对图像的水平方向求导
// 部分参数说明:
// CV_8U是目标图像的深度
// 1表示对x方向求导,0表示不对y方向求导
// 3是核kernel的大小
Sobel(image, image, CV_8U, 1, 0, 3, 1, 0);
imshow("【sobel滤波】", image);效果如下,左边是对x方向求导(作为对比,右边是对y方向求导):
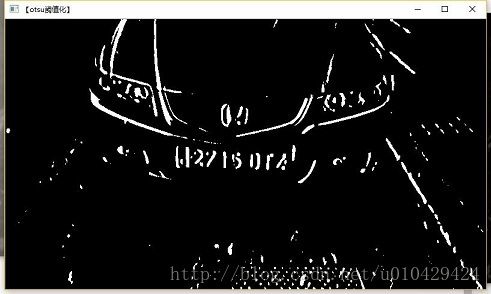
Sobel滤波后,利用otsu(大津法)算法对图像进行自动阈值化,得到一幅最优化的二值图像
关于otsu算法,可见:http://blog.csdn.net/liyuanbhu/article/details/49387483
threshold(image, image, 0, 255, CV_THRESH_OTSU);
imshow("【otsu阈值化】", image);otsu后的图像如下:
然后使用闭运算(先膨胀再腐蚀)连通近邻的区域,说白了就是将亮的区域尽量连在一起
Mat element = getStructuringElement(MORPH_RECT, Size(17, 3));
morphologyEx(image, image, CV_MOP_CLOSE, element);
imshow("【闭运算】", image);闭运算后的图像如下:

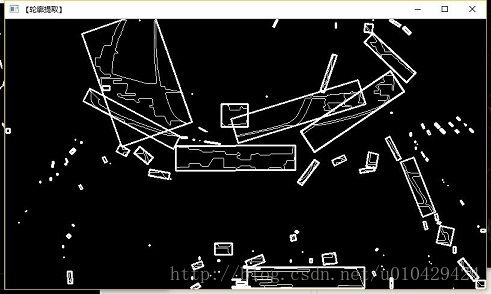
可以看到,经过闭运算后的图像,白色的部分被连在了一起,车牌刚好处于连通区域内,此时使用轮廓检测,并提取矩形区域,就可以粗略提取出车牌可能存在的区域
// 定义存储轮廓的向量
vector<vector轮廓提取的结果如下:

提取轮廓后,依次遍历每一个轮廓,通过面积、宽高比来验证是否为车牌区域,首先绘制出这些矩形区域
修改上面的代码,增加绘制矩形的代码(RotatedRect旋转矩形的绘制没有现成的函数,需要通过绘制直线完成)
vector<vector绘制矩形的结果如下:
下面编写验证矩形的函数,验证的原则是:
车牌宽高比为520/110=4.727272,误差不超过40%
车牌高度的范围在15~125之间
验证代码如下:
bool verify(RotatedRect rect) {
float error = 0.4;
const float aspect = 4.7272;
int min = 15 * aspect * 15; // 面积下限
int max = 125 * aspect * 125; // 面积上限
float rmin = aspect - aspect * error; // 宽高比下限
float rmax = aspect + aspect * error; // 宽高比上限
int area = rect.size.width * rect.size.height; // 计算面积
float r = rect.size.width / rect.size.height; // 计算宽高比
r = r < 1 ? 1 / r : r;
return area >= min && area <= max && r >= rmin && r <= rmax;
}
在上述绘制矩形的代码后,加入验证代码
vector<vector随后添加几行代码,把通过验证的矩形都绘制出来
// 绘制通过验证的矩形
map<int, RotatedRect>::iterator iter;
iter = _map.begin();
while (iter != _map.end()) {
RotatedRect rect = iter->second;
Point2f vertices[4];
rect.points(vertices);
for (int j = 0; j < 4; j++) {
line(image, vertices[j], vertices[(j + 1) % 4], Scalar(255), 10);
}
iter++;
}
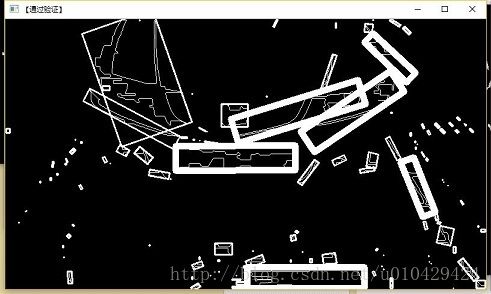
imshow("【通过验证】", image);绘制通过验证的矩形,结果如下(粗线表示通过验证的矩形,仔细看一共6个粗线矩形):
那么,如何从这些通过验证的矩形中,得到车牌所在的那个矩形呢?
《深入理解OpenCV实用计算机视觉项目解析》一书中采用漫水填充算法,利用车牌背景为白色这一特性,获取最优的矩形。需要创建图像掩码、随机的种子点等等,设定很多参数,总之程序很复杂。
在这里,我提出一个不成熟的观点,思想超级简单,经过测试也可以成功提取车牌。
我们知道,车牌所在的区域是一个近似矩形的区域,用轮廓提取的方法,我们得到了这些近似矩形区域的轮廓。通过观察发现,车牌的轮廓是这些轮廓中最方方正正的,看起来最像矩形的。如果我们定义一个标准,衡量这些轮廓的矩形化程度,这样就可以选出最接近矩形的那一个。仿照圆度的定义,我把这个衡量标准暂且叫做“矩形度”,矩形度的定义如下:
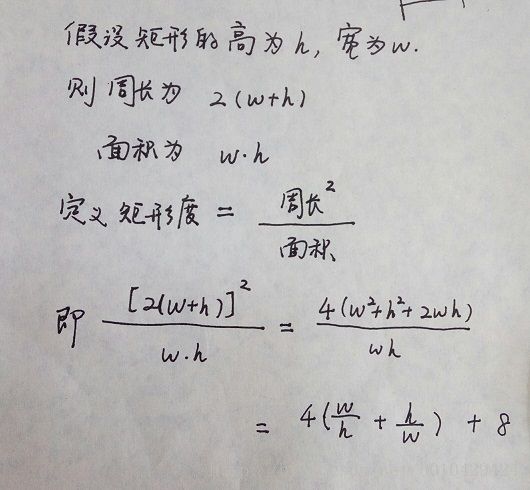
其中,w/h 为宽高比,在之前已经定义,其大小为4.7272
则车牌轮廓的矩形度标准为:4 * (4.7272 + 1/4.7272) + 8 = 27.75
我们认为如果一个轮廓的矩形度越接近27.75,说明它就越像车牌。当然如果这个方法不准确,还可以通过位置,角度等信息进一步改进,或者就像书中那样,使用漫水填充算法。
将上述思想转化为代码:
// 绘制通过验证的矩形
// ----------------定义矩形度计算用到的变量和常量 start---------------------
int min_diff = 100000;
int index = 0;
const float square = 27.75;
// ----------------定义矩形度计算用到的变量和常量 end-----------------------
map<int, RotatedRect>::iterator iter;
iter = _map.begin();
while (iter != _map.end()) {
RotatedRect rect = iter->second;
Point2f vertices[4];
rect.points(vertices);
for (int j = 0; j < 4; j++) {
line(image, vertices[j], vertices[(j + 1) % 4], Scalar(255), 10);
}
// -----------------矩形度计算 start-------------------------
int perimeter = arcLength(contours[iter->first], true);
int area = contourArea(contours[iter->first]);
if (area != 0) {
int squareness = perimeter * perimeter / area;
float diff = abs(squareness - square);
if (diff < min_diff) {
min_diff = diff;
index = iter->first;
}
}
// -----------------矩形度计算 end-------------------------
iter++;
}
imshow("【通过验证】", image);为了显示方便,我在原始图像上绘制结果,这部分代码不贴出来了,直接看效果吧:

最后一步,图像切割,把检测到的车牌切割出来,效果如下:
// 图像切割
Mat image_crop;
// 始终保持宽 > 高
Size rect_size = rect.size;
if (rect_size.width < rect_size.height) {
swap(rect_size.width, rect_size.height);
}
getRectSubPix(image3, rect.size, rect.center, image_crop);
imshow("【切割后的车牌】", image_crop);
最后,本篇的完整代码如下:
#include 参考
otsu算法:http://blog.csdn.net/liyuanbhu/article/details/49387483
OpenCV findContour函数: http://blog.csdn.net/yin1203014/article/details/44462791
RotatedRect :http://blog.csdn.net/u012507022/article/details/51684776
漫水填充算法:http://blog.csdn.net/poem_qianmo/article/details/28261997在下一篇文章,将对车牌号图片进行分类和识别,拜~
系列文章
OpenCV自学笔记17. 基于SVM和神经网络的车牌识别(一)
OpenCV自学笔记18. 基于SVM和神经网络的车牌识别(二)
OpenCV自学笔记19. 基于SVM和神经网络的车牌识别(三)
OpenCV自学笔记20. 基于SVM和神经网络的车牌识别(四)