SAMF
尺度变化是跟踪中比较基本和常见的问题,前面介绍的算法都没有尺度更新,如果目标缩小,滤波器就会学习到大量背景信息,如果目标扩大,滤波器就跟着目标局部纹理走了,这两种情况都很可能出现非预期的结果,导致漂移和失败。
可以看出这篇论文就在KCF和CN出来后不久,也是第一次HOG和CN结合,SAMF的多尺度检测方法用作者的原话是straightforward(论文里出现这个词,隐含的意思就是“这么做就行了,没啥创新”),类似检测算法里面常用的多尺度检测方法,1.005间隔的7个尺度缩放图像分别检测,然后取7个响应图的最大值点,为了看清我把间隔扩大到1.05的5个尺度:
我们提出了一种有效的尺度自适应方法。
如卷积定理中所述,时域中的相关对应于傅立叶域中的元素相乘。
虽然这些基于相关滤波的跟踪器在精度和鲁棒性上都取得了令人满意的结果,但它们使用的模板大小固定,不能处理目标的尺度变化。
多特征集成的尺度自适应核化相关滤波跟踪器。
CN,HOG,尺度自适应,核化,相关滤波跟踪器
本文提出了一种多特征集成的尺度自适应核化相关滤波跟踪器。该方法采用多尺度搜索策略,克服了传统相关滤波跟踪器的局限性
CSK提出探索循环补丁的结构,通过增加负样本来增强分类器,使用核相关滤波器来实现高效率。在CSK的基础上,KCF采用HOG特征代替原始像素,提高了跟踪器的精度和鲁棒性。为了进一步提高CSK跟踪器的性能,]将颜色命名功能引入到目标跟踪任务中,这是彩色目标的强大功能。
KCF 本文中

由于该算法只需要点积和DFT/IDFT,计算量在O(Nlogn)时间内。训练标签y是高斯函数,它从中心目标的值1平滑衰减到其他移位的值0。由于零表示负样本,因此需要放大原始目标边界框以包围负样本。本文采用比原始目标盒大2.5倍的窗口进行训练。虽然循环移位丢失了原始帧上的大量信息,但分类器获得了密集的样本,以便更精确地拟合模型。

梯度直方图(HOG)是视觉领域最常用的视觉特征之一,因为它在实际应用中非常有效,计算效率也非常高。该特征从单元格提取梯度信息,该单元格是像素范围。HOG对离散方向进行计数以形成直方图。和在[9]中一样,我们在我们的方法中使用了31个梯度方向箱变量。
我们使用了[32]中描述的映射方法将RGB空间转换为颜色名称空间,这是一个11维的颜色表示。颜色名称提供对对象颜色的感知,通常包含关于目标的重要信息。
HOG强调图像的渐变,而颜色命名则侧重于颜色信息。在4.2节中,我们将分别验证这些功能的有效性。虽然这个想法相当简单,但性能收益是非常有希望的。注意,特征大小最初彼此不一致,并且应该对相关滤波器的特征数据应用对齐。
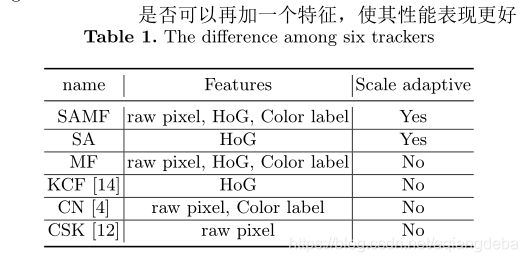
首先,我们实现了三种不同设置的跟踪器,包括多特征跟踪器(MF)、尺度自适应跟踪器(SA)和提出的尺度自适应多特征跟踪器(SAMF)。
在没有经过优化的情况下,用原生Matlab实现了所提出的跟踪器。所有的实验都是在Inteli5-760CPU(2.80 GHz)PC上进行的,内存为16 GB。我们建议的SAMF跟踪器运行速度约为7fps。高斯函数中使用的σ设置为0.5。HOG的细胞大小为4×4,定向仓数为9,学习率θ设置为0.0 1。我们使用尺度池S = {0.985,0.99,0.995,1.0,1.005,1.01,1.015}
第一种是平均中心定位误差(CLE)。LE是跟踪结果的中心与标注的真实值之间的差值,值越小,表示结果越准确。
实验结果表明,本文提出的跟踪器在鲁棒性和精确度方面都有很好的应用前景。实验还表明,特征和搜索策略在视觉跟踪中起着非常重要的作用。与KCF相比,SA和MF的VOR性能分别提高了3.8%和2.7%,而SAMF比KCF提高了10.6%。这表明SAMF不是MF和SA的简单结合,它可以在准确估计目标大小的同时有效地捕捉颜色信息。