ELAS库计算双目视差图
ELAS源码下载:https://www.cvlibs.net/download.php?file=libelas.zip
代码结构目录
修改/src/main.cpp如下:
/*
Copyright 2011. All rights reserved.
Institute of Measurement and Control Systems
Karlsruhe Institute of Technology, Germany
This file is part of libelas.
Authors: Andreas Geiger
libelas is free software; you can redistribute it and/or modify it under the
terms of the GNU General Public License as published by the Free Software
Foundation; either version 3 of the License, or any later version.
libelas is distributed in the hope that it will be useful, but WITHOUT ANY
WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A
PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with
libelas; if not, write to the Free Software Foundation, Inc., 51 Franklin
Street, Fifth Floor, Boston, MA 02110-1301, USA
*/
// Demo program showing how libelas can be used, try "./elas -h" for help
#include
#include "elas.h"
#include "image.h"
#include
#include
#include
#include
#include
#include "opencv2/imgproc/imgproc_c.h"
using namespace std;
// compute disparities of pgm image input pair file_1, file_2
void process (const char* file_1,const char* file_2) {
cout << "Processing: " << file_1 << ", " << file_2 << endl;
// load images
image *I1,*I2;
I1 = loadPGM(file_1);
I2 = loadPGM(file_2);
// check for correct size
if (I1->width()<=0 || I1->height() <=0 || I2->width()<=0 || I2->height() <=0 ||
I1->width()!=I2->width() || I1->height()!=I2->height()) {
cout << "ERROR: Images must be of same size, but" << endl;
cout << " I1: " << I1->width() << " x " << I1->height() <<
", I2: " << I2->width() << " x " << I2->height() << endl;
delete I1;
delete I2;
return;
}
// get image width and height
int32_t width = I1->width();
int32_t height = I1->height();
// allocate memory for disparity images
const int32_t dims[3] = {width,height,width}; // bytes per line = width
float* D1_data = (float*)malloc(width*height*sizeof(float));
float* D2_data = (float*)malloc(width*height*sizeof(float));
// process
Elas::parameters param;
param.postprocess_only_left = false;
Elas elas(param);
elas.process(I1->data,I2->data,D1_data,D2_data,dims);
// find maximum disparity for scaling output disparity images to [0..255]
float disp_max = 0;
for (int32_t i=0; idisp_max) disp_max = D1_data[i];
if (D2_data[i]>disp_max) disp_max = D2_data[i];
}
// copy float to uchar
image *D1 = new image(width,height);
image *D2 = new image(width,height);
for (int32_t i=0; idata[i] = (uint8_t)max(255.0*D1_data[i]/disp_max,0.0);
D2->data[i] = (uint8_t)max(255.0*D2_data[i]/disp_max,0.0);
}
// save disparity images
char output_1[1024];
char output_2[1024];
strncpy(output_1,file_1,strlen(file_1)-4);
strncpy(output_2,file_2,strlen(file_2)-4);
output_1[strlen(file_1)-4] = '\0';
output_2[strlen(file_2)-4] = '\0';
strcat(output_1,"_disp.pgm");
strcat(output_2,"_disp.pgm");
savePGM(D1,output_1);
savePGM(D2,output_2);
// free memory
delete I1;
delete I2;
delete D1;
delete D2;
free(D1_data);
free(D2_data);
}
int main (int argc, char** argv) {
// run demo
if (argc==2 && !strcmp(argv[1],"demo")) {
process("img/cones_left.pgm", "img/cones_right.pgm");
process("img/aloe_left.pgm", "img/aloe_right.pgm");
process("img/raindeer_left.pgm","img/raindeer_right.pgm");
process("img/urban1_left.pgm", "img/urban1_right.pgm");
process("img/urban2_left.pgm", "img/urban2_right.pgm");
process("img/urban3_left.pgm", "img/urban3_right.pgm");
process("img/urban4_left.pgm", "img/urban4_right.pgm");
cout << "... done!" << endl;
// compute disparity from input pair
} else if (argc==3) {
string argv1 = string(argv[1]);
string argv2 = string(argv[2]);
string extension1 = argv1.substr(argv1.find_last_of('.'), argv1.length());
string extension2 = argv1.substr(argv2.find_last_of('.'), argv2.length());
if (extension1 == ".pgm" || extension2 == ".pgm")
{
process(argv[1],argv[2]);
cout << "... done!" << endl;
string name = argv1.substr(argv1.find_last_of('/')+1, argv1.length());
name = name.substr(0, name.find_last_of('.')) + "_disp";
cv::Mat img = cv::imread("../img/" + name + ".pgm");
cv::normalize(img, img, 0, 255, cv::NORM_MINMAX);
cv::imshow("Disp Image window",img);
cv::waitKey(0);
cv::imwrite("../img/" + name + ".png", img);
}
else if (extension1 == ".png" || extension2 == ".png")
{
//参考:https://blog.csdn.net/dulingwen/article/details/104128503
cv::Mat left = cv::imread(argv[1]);
cv::Mat right = cv::imread(argv[2]);
// cv::imshow("Left Image",left);
// cv::imshow("Right Image",right);
// cv::waitKey(0);
if (left.size != right.size)
{
cerr << "左右视图必须拥有相同的尺寸" << endl;
return -1;
}
if (left.channels() == 3)
cvtColor(left, left, cv::COLOR_RGB2GRAY);
if (right.channels() == 3)
cvtColor(right, right, cv::COLOR_RGB2GRAY);
int width = left.cols;
int height = left.rows;
int dim[3] = { width, height, width };
cv::Mat disp_left = cv::Mat::zeros(cv::Size(width, height), CV_32FC1);
cv::Mat disp_right = cv::Mat::zeros(cv::Size(width, height), CV_32FC1);
// 参数设置
Elas::parameters param;
param.disp_min = 0; // 最小视差
param.disp_max = 256; // 最大视差
param.support_threshold = 0.85; // 比率测试:最低match VS 次低match
param.support_texture = 10; // 支持点的最小纹理
param.candidate_stepsize = 5; // 用于支持点的sobel特征匹配的邻域半径
param.incon_window_size = 5; // 不连续性窗口的尺寸
param.incon_threshold = 5; // 不连续性窗口内的视差范围阈值
param.incon_min_support = 5; // 不连续性窗口内的最低支持点数量
param.add_corners = true; // 是否添加角点
param.grid_size = 20; // 网格尺寸
param.beta = 0.02; // 图像相似性度量的参数
param.gamma = 3; // 先验概率常数
param.sigma = 1; // 先验概率的标准差
param.sradius = 3; // 标准差半径
param.match_texture = 1; // 最低纹理
param.lr_threshold = 1; // 左右一致性检验阈值
param.speckle_sim_threshold = 1; // 连通域判断阈值
param.speckle_size = 200; // 连通域噪声尺寸判断阈值
param.ipol_gap_width = 3; // 空洞宽
param.filter_median = false; // 是否中值滤波
param.filter_adaptive_mean = true; // 是否自适应中值滤波
param.postprocess_only_left = true; // 是否只对左视差图后处理,设置为True可以节省时间
param.subsampling = false; // 每个两个像素进行视差计算,设置为True可以节省时间,但是传入的D1和D2的分辨率必须为(w/2) x (h/2)
clock_t start = clock();
Elas elas(param);
elas.process(left.data, right.data, disp_left.ptr(0), disp_right.ptr(0), dim);
clock_t end = clock();
cout << "running time: " << (double)(1000 * (end - start) / CLOCKS_PER_SEC) << endl;
disp_left = disp_left * 3;
string name = argv1.substr(argv1.find_last_of('/')+1, argv1.length());
name = name.substr(0, name.find_last_of('.')) + "_disp";
cout << "../img/" + name + ".png" << endl;
cv::imwrite("../img/" + name + ".png", disp_left);
cout << "... done!" << endl;
}
// display help
} else {
cout << endl;
cout << "ELAS demo program usage: " << endl;
cout << "./elas demo ................ process all test images (image dir)" << endl;
cout << "./elas left.pgm right.pgm .. process a single stereo pair" << endl;
cout << "./elas -h .................. shows this help" << endl;
cout << endl;
cout << "Note: All images must be pgm greylevel images. All output" << endl;
cout << " disparities will be scaled such that disp_max = 255." << endl;
cout << endl;
}
return 0;
}
打开终端
cd ~/Documents/projects/libelas/
mkdir build
cd /build
cmake ..
make
编译通过后
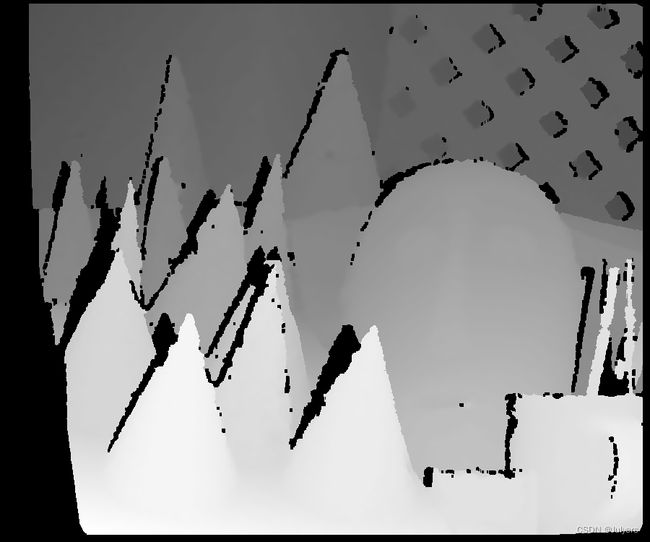
# 输入pgm格式图片得到的视差图
./elas ../img/cones_left.pgm ../img/cones_right.pgm
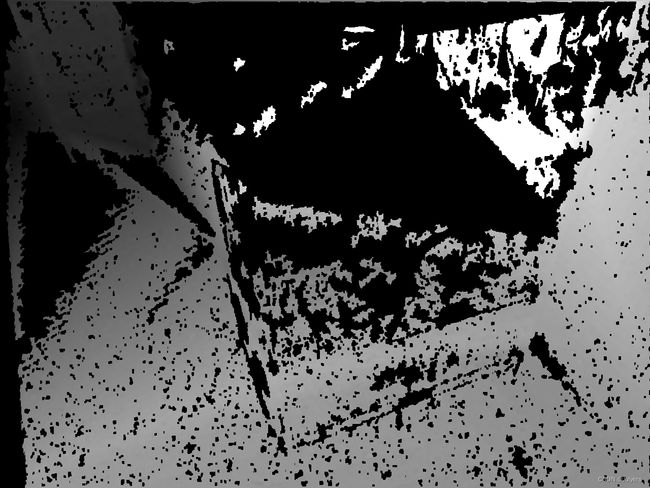
# 输入png格式图片得到的视差图
./elas ~/Documents/data/MyEuRoC/cam0/data/1694603839467.png ~/Documents/data/MyEuRoC/cam1/data/1694603839467.png
参考:
[1] 双目立体匹配算法:ELAS
[2] VS2019下cmake项目:利用ELAS方法计算双目视差